Classement



Contenu populaire
Affichage du contenu avec la meilleure réputation le 01/11/25 dans toutes les zones
-
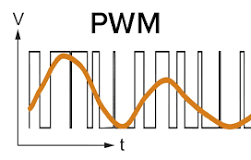
Saluatousse. Il y a bien encore 2 ou 3 membres qui ne savent pas trop ce que cache ce sigle anglais qui signifie Pulse Width Modulation. Cela correspond à une commande qui, au lieu d'être analogique (c'est à dire continue, progressive), est binaire (tout ou rien) modulée en largeur, ce qui limite les pertes. Concrètement, on hache la commande à l'aide d'une fréquence fixe, et on fait varier le taux de modulation, c'est à dire le pourcentage de temps de conduction par rapport à la période. En modifiant ce taux, de 0% à 100%, on obtient un créneau que l'on peut filtrer (intégration) pour obtenir une action progressive, monotone. Pour une roue électrique, il est intéressant d'avoir cette information de pwm, car elle représente l'effort effectif envoyé au moteur, et renseigne donc de la marge de puissance encore disponible, quand on va vite. A ma connaissance, c'est Gotway qui a exploité cette valeur en déclenchant l'alarme sonore 3, non pas sur la vitesse, mais à 80% de pwm. C'est très judicieux car cela tient compte de toutes les variables comme pente, tension batterie, gonflage pneumatique, vent... Ceci dit, d'autres roues ont aussi diverses alarmes mais pas documentées comme étant des surveillances du pwm, même si c'est le cas. Désormais, sur les roues récentes, cette information pwm est émise en bluetooth, et certaines applis permettent d'ajuster des alarmes à la demande. Bien. Je crée ce sujet car je viens de voir la vidéo de Dawn Champion qui m'apprend un truc ahurissant : certaines applis peuvent afficher des pwm de 120% ! . Surréaliste, j'en suis baba. Bon, on peut rectifier ça en faisant une calibration roue soulevée, ce qui n'est pas bête car, à vide, ce n'est pas la puissance qui va mettre le pwm en butée à 100%, mais la fcem. Une vraie championne qui sait de quoi elle parle.
 1 point
1 point -
30% c est énorme pour 10000km. Tu est sur d avoir fait dans les même conditions (poid, température,type de conduite)? Ta roue charge entre 83 et 84v?1 point
-
Salut, Je viens aussi d une v8f et au début oui on a bien l'impression que la roue part à la moindre mini saignée dans la chaussée ou moindre dévers mais la sensation s estompe avec le temps, peut-être es tu trop gonflé. Au début également je roulais sans pad mais depuis que j en ai rajoutés je trouve que cela apporte un confort et plus de sécurité car la roue est quand même lourde. Quand à l amortissement, pareil je n'ai pas de point de comparaison mais j en suis satisfait. La pneu n'aime pas la boue, mes cotes s'en souviennent encore! Elle est bien étanche par contre! Bon ride et profite bien!1 point
-
Bonsoir Je vous remercie pour vos encouragements et particulièrement ‘ King Size ‘pour son explication afin de ne pas ‘ perdre les pedales ‘ dès que Le temps le permet j’applique la formule et je jouis de ma roue en bon père de famille comme ds les Actes Notariés ! Bonne soirée à toutes et tous1 point
-
Tu devrais en être très satisfait. Ma V11 vient de passer le cap des 11000 kms. RAS. Hors mis une légère perte d'autonomie 30%. J'ai et je prends très soin des recharges depuis le début. Ce n'est par pour autant que je n'ai pas de baisse d'autonomie. Autrement, je m'ennuie avec sa Vmax des 55 km-h et la configuration des amortisseurs Sur la V11Y, ils semblent beaucoup mieux les amortisseurs.1 point
-
Salut je viens de faire mes 5 premiers km avec la v11 y, après un temps d'adaptation je la trouve très sécurisante, super facile sur les départs arrêtés (je viens de la v8f), j'ai testé les routes crades avec les nids de poule ça passe nickel. Les descentes de trottoir aussi pour l'instant je suis très content. Trucs chiants les petites saignées dans le sens de la marche, la roue vient se caler dessus, le bip quand la limite est à 25 km il arrive super tôt, et on a vraiment l'impression de se traîner à 25 km. Encore une ou deux sorties dans ma banlieue et je vais tenter les trajets Boulot avec partie sur paris1 point
-
1 point
-
Ce n'est que mon avis, mais après avoir vu la Sher S, la Pat, et la Sher L, je trouve la Lynx la mieux proportionnée de la bande. J'aime son aspect monolithe "fin". Après c'est purement subjectif, et finalement quand on est dessus ça n'a pas tant d'importance 😅. Par contre, la pose de power pads est "limite" il y a la place mais chez moi du moins ça déborde légèrement en avant et en arrière (maybe j'ai des gros mollet 🤣).1 point
-
Je vais compléter un peu ce sujet pwm. On peut assez facilement imaginer un pwm qui s'ajuste de 0 à 100%, c'est presque toujours le cas pour un chargeur ou une alimentation.. Mais en fait, pour une commande de moteur, il faut considérer que le pwm évolue de -100% à +100%. Les impulsions de courant sont synchrones de la position rotor/stator, selon la phase on peut être en mode moteur ou alternateur. Un pwm est négatif quand on est en mode régénération, et il contrôle le courant qui est renvoyé aux batteries. Exemple, sur ma petite voiture électrique : le pwm est sous forme de marguerite, 8 pétales dont 2 rouges en accélération : et 3 pétales en décélération (régénération) : Quand on surveille cette info, cela améliore la fluidité de conduite, exemple sur une roue avec une montre : C'est une grosse descente, presque toujours en régénération (bare-graph chenillard en haut).

 1 point
1 point -
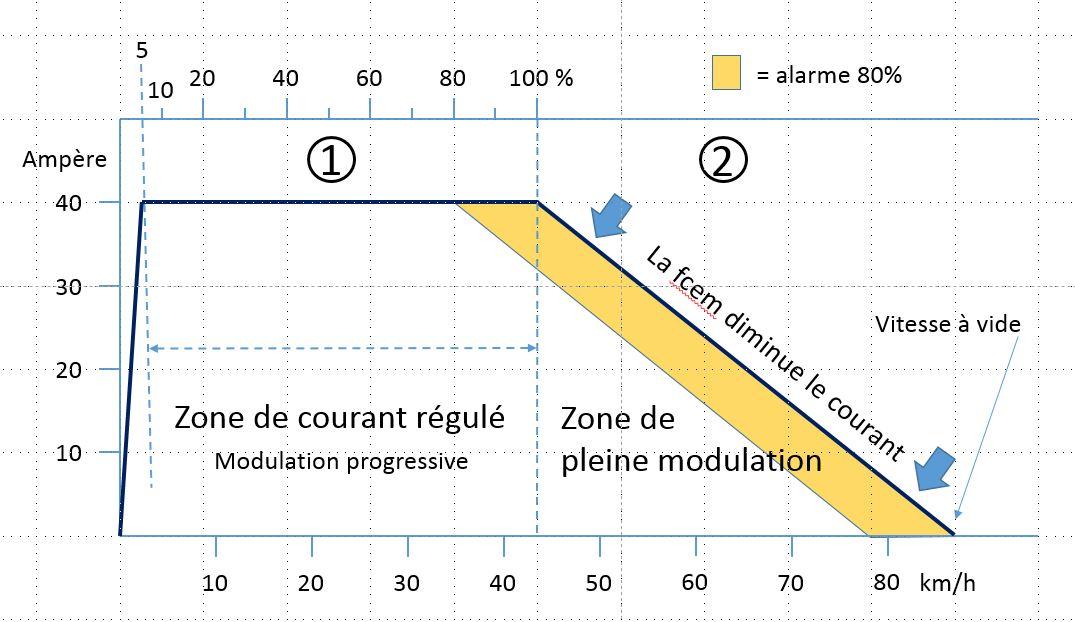
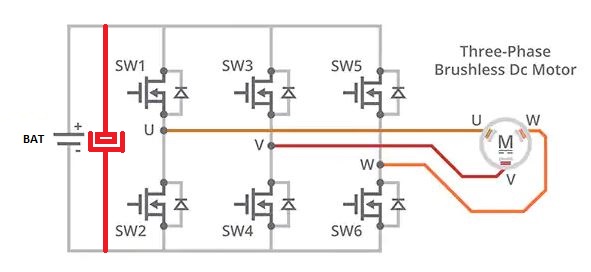
Bonne question. Il faut se rappeler que nos moteurs brushless ont une résistance interne extrêmement faible. C'est mon moteur v11 lors du changement de roulements. Le bobinage est réalisé par de nombreux fils en // (~ une quinzaine) qui entoure successivement 1 pièce polaire sur 3, il y a 3 faisceaux décalés pour créer une structure en étoile (il y a un point milieu, non relié) : Au final, la résistance interne du moteur s'exprime en milliOhms. Il faut donc piloter ce moteur en courant, en générant (pwm) d'abord une petite tension de démarrage, puis une tension de + en + grande lors de la montée en vitesse, afin de s'opposer à la fcem. C'est la zone 1 du diagramme suivant : En zone 2, la commande reste à 100% pour maintenir une tension toujours un peu supérieure à la fcem afin d'avoir le courant nécessaire à la rotation. Pour revenir à la question, quand on est en charge 100% on est en haut de la zone orange, quand on est à vide, on est en bas. Si on dépasse cette vitesse à vide (à l'aide d'un autre moteur...), notre moteur devient un alternateur et il fournit de l'énergie plutôt que de la consommer. En conclusion, j'ai plutôt tendance à faire confiance à cette méthode de roue soulevée, qui nécessite bien sûr d'inhiber le tilt-back. Mais je me trompe peut-être. Ne pas oublier de remettre le tb à une valeur raisonnable.

 1 point
1 point -
Revue de la Commander GT Pro par Ibr l'Artiste :1 point
-
Et bien j'entame le 3 ème jour de roulage en température négative et une météo qui oscille entre neige, glace, et granité 😅... Les Belges du forum doivent me comprendre 😉. La Lynx reste fidèle à sa réputation, fiable et puissante, sans parler du sentiment de sécurité. Par contre ça commence à me faire douter sur le changement de pneu que je veux opérer, actuellement avec son pneu cross je ne crains aucune meteo ( en dehors peut être du verglas ) avec un pneu route sera t'il pareil ? 😅1 point