Adrien WALLON
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Adrien WALLON
-
 c'est bien un Ubox 100V oui ! Avec la version 6 du firmware, tu as accès à des packages pour Onewheel qui permettent de tout régler. J'ai suivi les tutos de surfdado sur youtube, qui explique tout de la MaJ à la config totale. Pour le bluetooth, Benjamin Webber a des tutos aussi sur youtube (le créateur du VESC). J'ai pu faire rouler la roue assez rapidement, le plus fastidieux, c'est finalement de déterminer ce qui te convient en terme de nervosité (gain PID mais pas que) tiltback, etc.
c'est bien un Ubox 100V oui ! Avec la version 6 du firmware, tu as accès à des packages pour Onewheel qui permettent de tout régler. J'ai suivi les tutos de surfdado sur youtube, qui explique tout de la MaJ à la config totale. Pour le bluetooth, Benjamin Webber a des tutos aussi sur youtube (le créateur du VESC). J'ai pu faire rouler la roue assez rapidement, le plus fastidieux, c'est finalement de déterminer ce qui te convient en terme de nervosité (gain PID mais pas que) tiltback, etc. -
Quand j'ai assemblé une batterie 20S (donc 84V chargé), en la déplaçant j'ai saisi la batterie, et je touchais la 2eme batterie avec le pouce et la 19eme avec l'index et le majeur. Les cellules étaient encore en tension de stockage donc env 3.5V par cellule, j'avais "seulement" 63V entre les doigts. Et pourtant, comme ils étaient un peu humides (sueur), je sentais un courant qui circulaient entre mes doigts et c'était vraiment pas agréable. J'ose même pas imaginer ce qu'il va se passer si qqun touche le + et - d'un pack à 150V... il y a un vrai risque de manipulation. De plus, 150V ça commence à faire des grosses étincelles.
-
bon dieu, ça monte fort les enchères, c'est de la concurrence déloyale 🥲
-
Argh j'avais oublié ça. La faute aux BMS bien cheap qui équilibre seulement au dessus de 4.18V par cellules... Perso un BMS intelligent est la meilleure upgrade que j'ai fait, vivement que ça se démocratise (c'est le cas sur la Extreme non ?) franchement c'est fort, chapeau
-
Si possible utilise un XT60S, ils ont une marque verte sur les pièces femelles et évitent une étincelle au branchement.
-
c'est pourtant un bon exercice sans réel danger ! ça te permettra de mieux comprendre ce qu'il se passe dans ta roue. Tu n'es pas obligé de démonter tout totalement, mais au moins enlever les coques c'est un bon début.
-
Si c'est un tout petit bloc bleu dont tu parles, le fait de tourner dans le vide ça veut dire que tu es au bout de la course du potard, il est au max. Après, ne pas charger sa roue à fond augmente grandement la durée de vie de ta batterie.
-
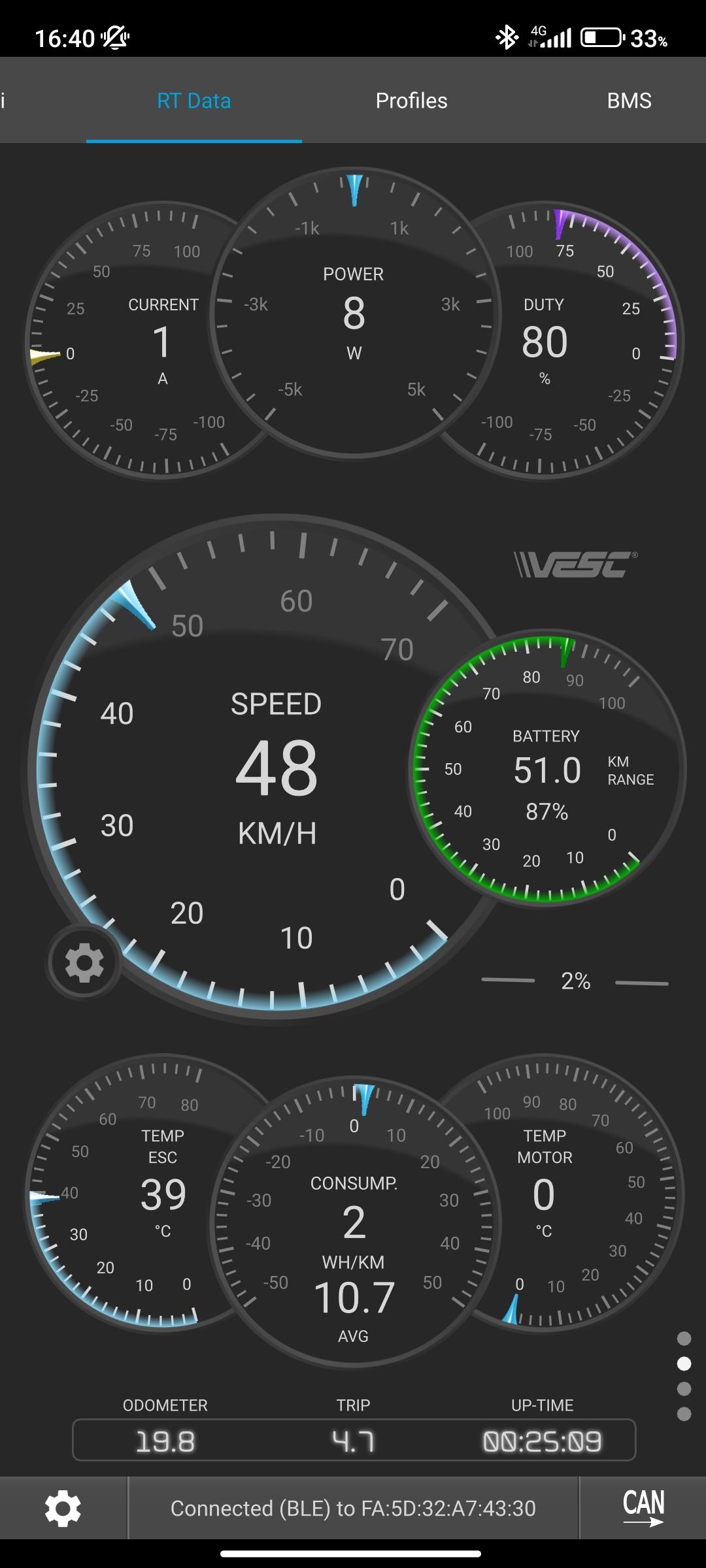
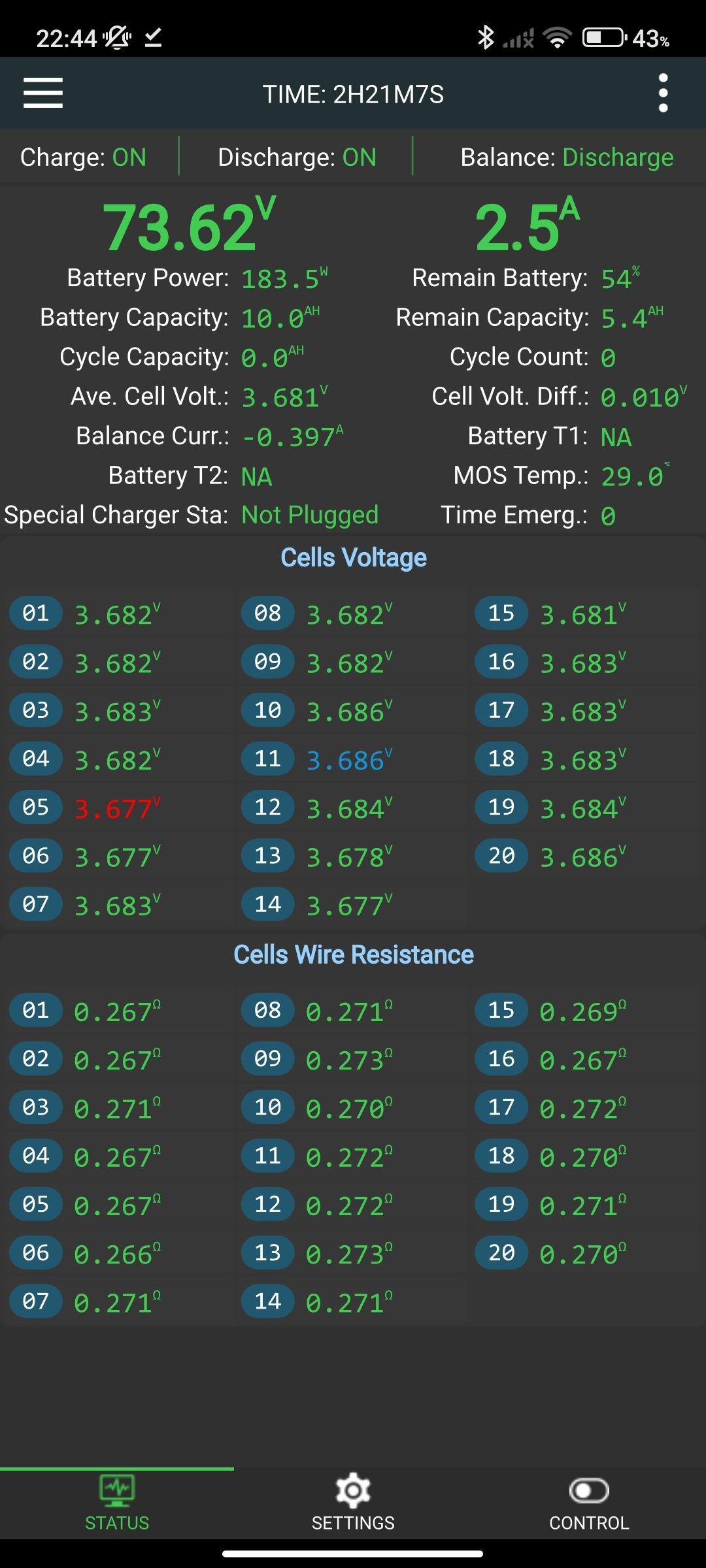
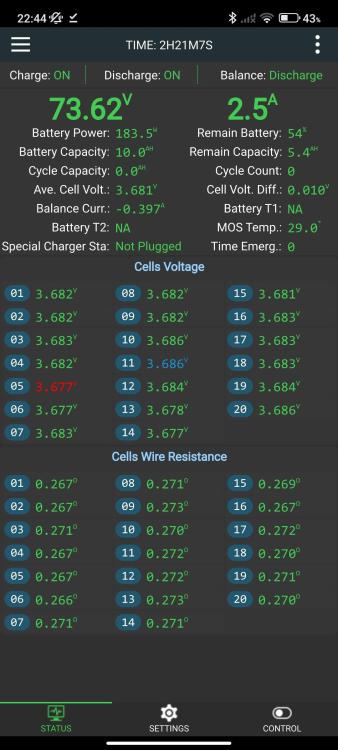
l'overlay sur l'appli mobile

-
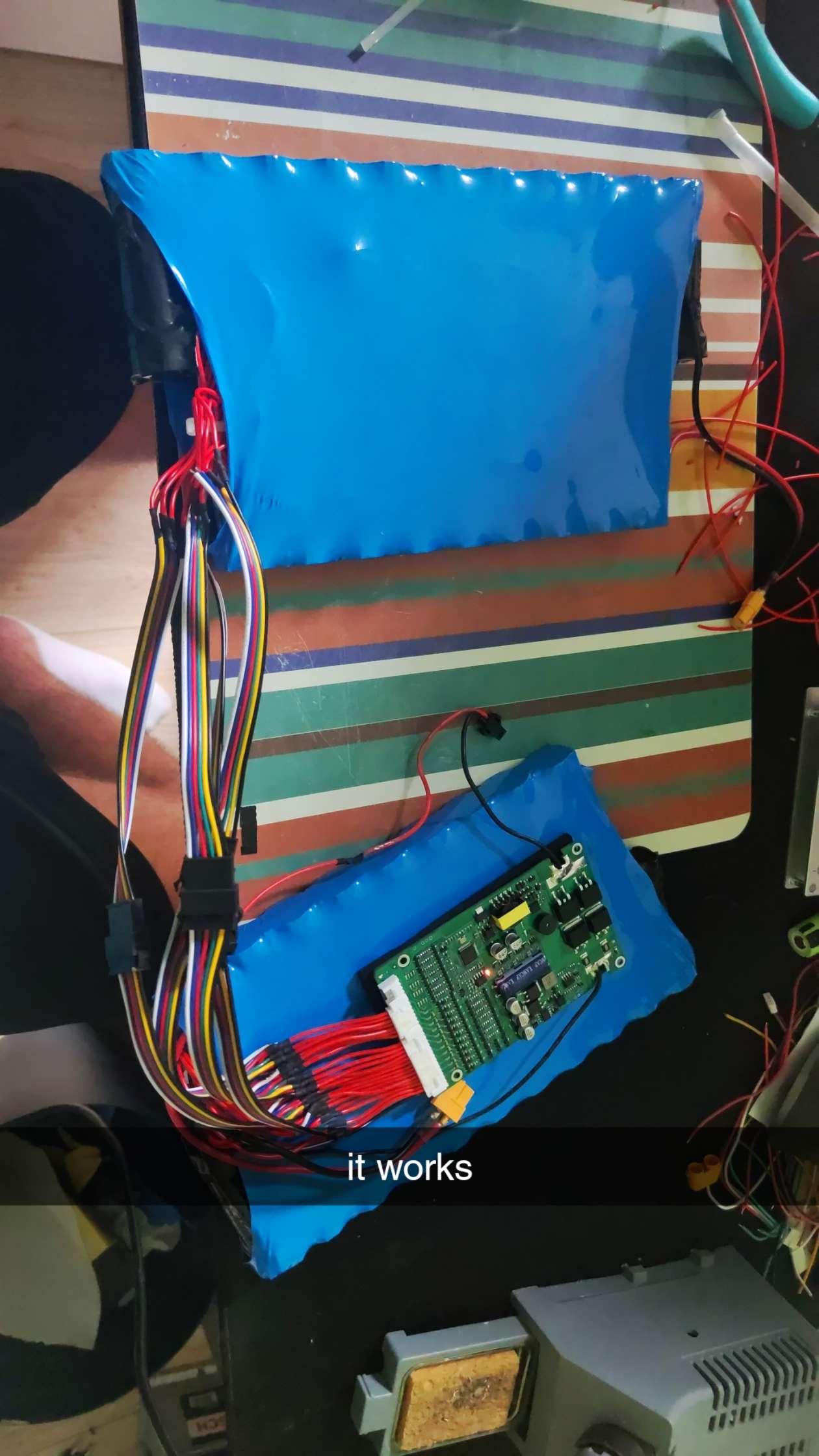
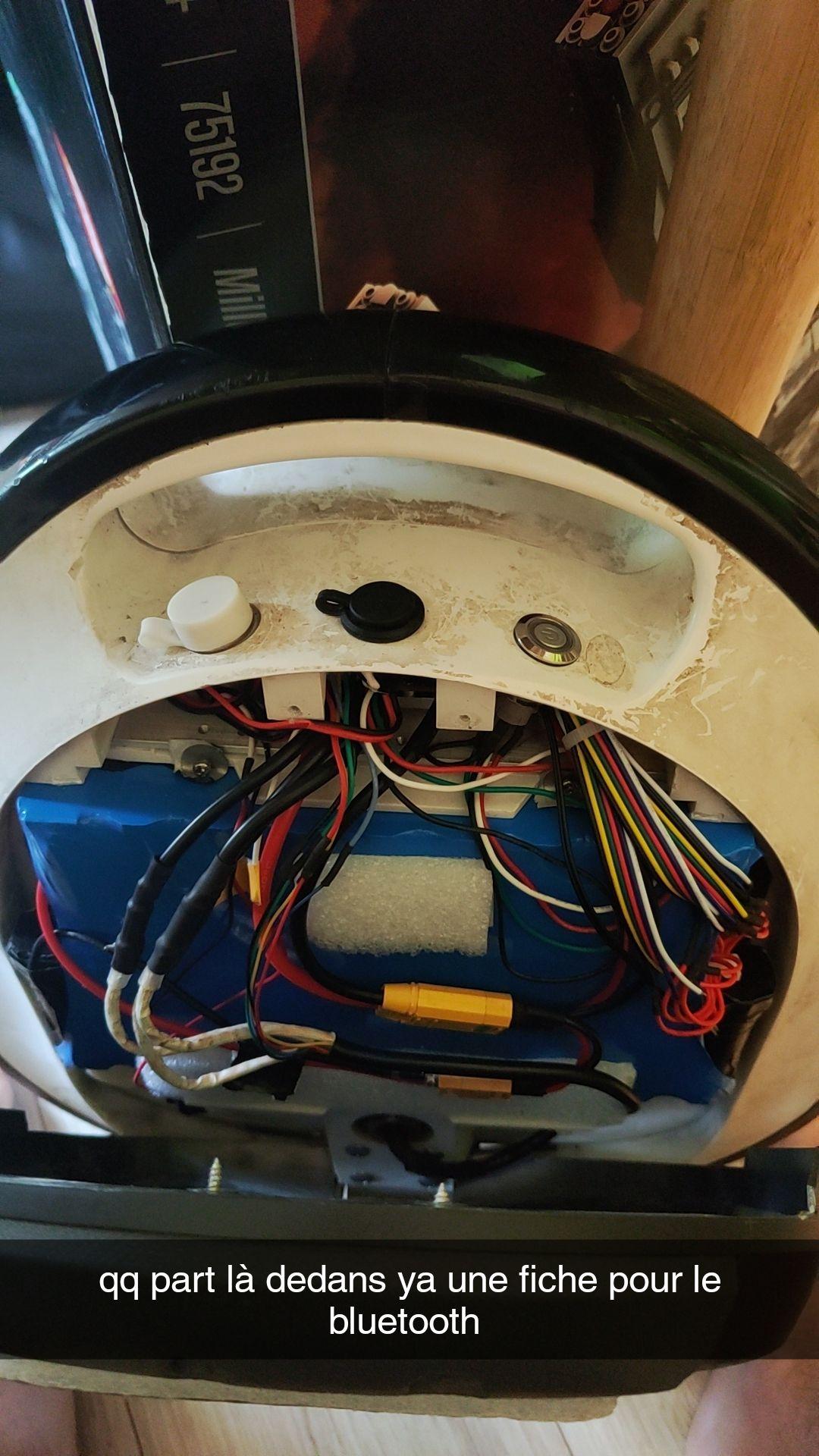
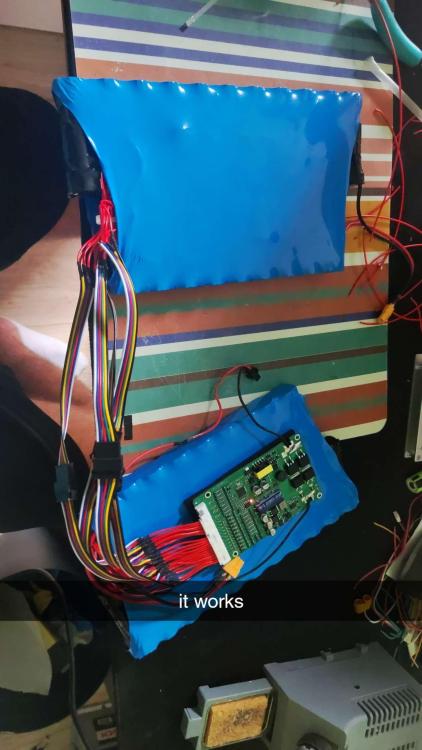
désolé pour les captions snap, j'avais que ça comme photo.






-
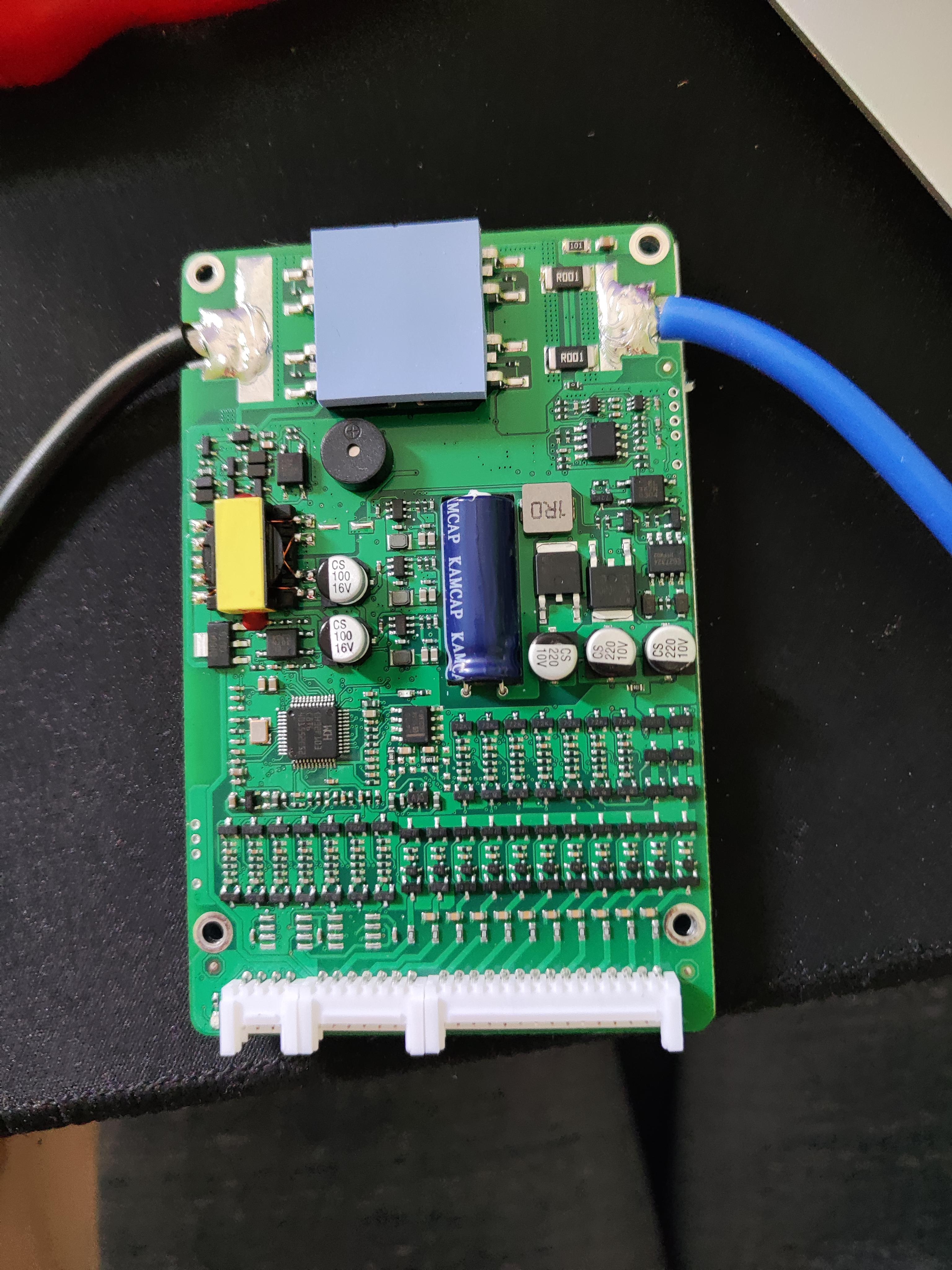
Bonjour à tous ! J'ai pas mal guetté ce forum sans m'inscrire, me voilà ! J'ai récupéré une MCM4 totalement HS et je me suis lancé dans le projet de la retaper -en mieux. ça a commencé par la conception des packs en 21700, 20S à gauche, 20S à droite, et un bms actif de chez JKBMS qui équilibre les batteries en permanence. Un bon bordel, ça rentre limite, surtout avec la nappe de fils pour connecter le pack de gauche à celui de droite qui a le BMS. Celui-ci a d'ailleurs le bluetooth, ce qui me permet de voir les tensions individuelles et les températures des packs. Le controlleur a été remplacé par un VESC de chez Spintend. Il a déjà un gyro intégré, j'ai juste rajouté un module bluetooth pour avoir les data en real-time sur mon tél (pratique). Il prend en charge les capteurs à effet Hall, le beeper, la led avant (construite à partir d'une lampe frontale) et depuis récemment un petit ventilo cage d'écureuil qui garde les températures sous les 35°C. En terme d'autonomie, j'ai atteint 55km en finissant sur le tilt back de battery faible avec de vraies belles côtes sur le chemin. J'ajoute les photos rapidement depuis mon tél, en attendant AMA !
-
Oh les cauchemars de prépa 🫠 OP, regarde du côté des VESC, il y en as qui crachent pas mal, c'est full programmable et tu peux ajouter des IMU -quand il est pas présent- du bluetooth, des leds, ça gère les capteurs Hall sans pbm, c'est génial.
-
Électromécaniquement, on définit le couple par rapport à sa constante de couple, qui définit le couple en fonction du courant qu'on lui balance. On dit alors que le couple max est atteint quand le stator (dans notre cas la partie qui contient les bobines) est saturée (le champ magnétique est au max du domaine linéaire, on a plus C = Km*I). Mais tu peux toujours balancer + de courant dans tes bobines, mais ton rendement chute. Tu vas augmenter le champ magnétique, le couple, mais va falloir envoyer une quantité monstre d'Ampère pour que ça marche. C'est ce qu'on voit dans les puissances "peak" sur les roues. Par exemple, ma MCM4 c'est 800W nominal, j'en ai déjà balancé 4300W en peak, mais j'avais pas du tout 5x plus de couple. Et oui, pousser le champ magnétique après la saturation provoque énormément d'échauffement. aussi, pour les moteurs de vélo, la puissance affichée est due à la limitation thermique : en effet, avec des bobines au centres, elles doivent chauffer l'air, qui chauffe le rotor qui échange avec l'extérieur, bof bof quoi. Une solution, c'est d'utiliser du Statorade, un ferrofluide qui joue le rôle de pont thermique entre le rotor et le stator. tu peux aussi utiliser des ailettes de refroidissement accrochées sur la roue. Regarde les QS205, ou QS273, les mecs font des bécanes électriques à ce niveau avec.
-
Bonne trouvaille ! pour tomber sur les mêmes pressions que le calculateur je dois mettre conduite aggressive 🤔je roule si fort que ça ?
-
Bonjour a tous, j'ai une MCM4 custom et j'aimerais savoir comment régler correctement la pression du pneu trop faible et j'ai l'impression de "glisser" dans les virages et une sensation d'instabilité + pédales qui raclent (+ j'ai pincé la chambre à air sur un choc) trop élevé et c'est vraiment pas comfortable, bien que ça roule super bien (super carve etc). Pour l'instant je suis à un peu plus de 3.1 bars et je fais un bon 90kg avec l'équipement + sac à dos.
-
Le plus important c'est que les batteries soient les mêmes et aient environ le même nombre de cycles par contre !