
Techos78
-
Compteur de contenus
7813 -
Inscription
-
Dernière visite
-
Jours gagnés
192 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Je ne sais pas pourquoi, mais le transport d'enfant me fait penser aux veaux . Bon, OK, c'est une trott' donc hs...
-
@Timini : tu as une grosse expérience et tu as bien fait le tour du sujet. Effectivement c'est le courant délivré par le contrôleur qui dimensionne la patate, et qui grille le moteur en cas d'excès, à n'importe quel régime. La puissance est indicative, elle est le produit du couple par la vitesse, c'est une performance mécanique, mais la contrainte thermique imposée au moteur est simplement le carré du courant (*). Comme d'hab', il faut ajouter que pour aller de + en + vite il faut de + en + de tension, mais le moteur ne souffre pas plus, même si les chiffres de puissance s'accroissent. (*) Il s'agit du courant dans le moteur. Le courant délivré par la batterie est une conséquence de la puissance mécanique, il y a un pwm entre les deux.
-

Passer de la roue à la trotinette.. conseils
Techos78 a répondu à un(e) sujet de jean111 dans Discussions générales
Effectivement, les trotts ont une tenue de route plutôt précaire... ceci dit, en eroue la situation n'est pas fameuse non plus. Pour les vieux con qu'ont de l'âge, il faut un engin plus stable, d'un pilotage moins exigeant. Exit les gyropodes, planches mono ou quad... Le problème c'est qu'on aborde là des trucs plus encombrants, jusqu'à speedbike, scooter, moto. Perso, pour ma décrépitude future, après avoir essayé une mini-draisienne (manque de patate = inexploitable en zone vallonnée), je choisirais plutôt une trott' grande roue, mon modèle préféré est la Zosh (française donc très chère), homologuée (< 1,65m, attention, pas toutes), facile d'utilisation debout/assis, avec porte bagage pour top-case ou sacoches (ou même remorque homologuée), accu démontable, qualité agricole (i.e. au top). https://www.youtube.com/shorts/3hRbW6FXX5I https://www.youtube.com/watch?v=wyv7es_61sQ&t=7s https://www.youtube.com/watch?v=2mALTf9kmtQ Donc prise en main très rapide, et bon comportement en tout-chemin, cet engin est souvent en location, donc achetable d'occase en fin de saison. Pour de l'urbain quasi exclusif, on peut changer les pneus fat pour du 3" routier, moins bruyants. -
Juste une remarque. Le tilt-back peut être absent lors d'une forte sollicitation, mais le "manque de temps" n'est pas la seule cause. Il faut bien comprendre le système : un tilt-back est un changement de consigne de verticalité, qui oblige l'asservissement à accroître fugitivement la vitesse de la roue, la roue va plus vite que le pilote pour créer le "relèvement de pédales". Et donc, si le moteur est au max, le tilt-back est impossible.
-
Nosfet AERO [14", 126V, 1110Wh, 70mm susp, 25Kg]
Techos78 a répondu à un(e) sujet de misc dans Discussions générales
Ben oui, comme le forum anglais... -
La vente de voiture, méthode russe :
-
Effectivement, 8,3 est a priori le minimum et correspond au trou d'origine pour schrader. Il y a une foultitude de modèles (Amazon...), les valves coudées ne sont pas des tubes cambrés mais des blocs alu usinés. Je n'y connais rien mais pour les systèmes avec joint torique externe (et écrou interne), ils se montent directement... à condition que le joint torique s'appuie sur une surface relativement plane. Exemple :

-
Au pif je dirais le plus petit possible, donc perçage à 12mm, et il faut que le côté intérieur soit plan, il faut probablement lamer en diamètre 16 mini. Bon, c'est courageux mais risqué : les jantes tubeless ont un profil spécial afin d'assurer l'étanchéité... Ma seule expérience est le montage d'un Pirelli Angel tubeless sur ma v11 mais en conservant la chambre... et j'en ai chié comme un russe au Congo pour centrer le biniou. Alors, sans chambre, mmhh...

-
Conseil Technique: quel est le rôle de cette pièce ? (MCM2)
Techos78 a répondu à un(e) question de Zepek69 dans Questions / Réponses
C'est effectivement un condensateur, de type électrochimique avec une forte valeur et une grande sortance en courant. Il est connecté sur la carte mère, directement à l'entrée des fils de(s) batterie(s). Sachant que la commande moteur fonctionne à l'aide de transistors (mosfet) en régime bloqué-saturé à modulation de largeur (pwm), la batterie délivre un courant haché, avec des pics de fortes valeurs, pouvant dépasser 500A sur les roues puissantes. Ce/ces condensateur(s) ont pour but de lisser le courant, cela améliore le comportement de l'asservissement moteur car la batterie elle-même a du mal à fournir le courant pic. Les alimentations auxiliaires (12V phare, 5V µcontrôleur) fonctionnent aussi dans de meilleures conditions. Ce lissage est important, il faut donc en remettre un ou plusieurs, en le collant sérieusement. Il a quand même un inconvénient : quand on branche la carte mère, il y a une étincelle. Bon, ce n'est pas bien grave.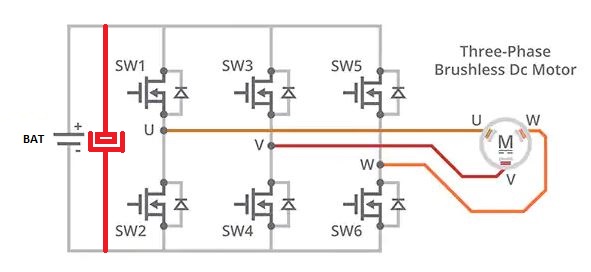
-
Dans la liste des protections d'usage, il n'est pas prévu d’interdire de mordre une batterie lithium : Il est donc possible que l'américain gagne son procès...
-
Salut @jploi, bienvenu sur le fofo. J'ai vu que tu as des soucis avec ta S18, c'est une roue très connue, des membres pourront probablement t'aider. Il y a des diableries avec la configuration dissymétrique des batteries, le sujet a été largement développé, en plus de l'aspect mécanique qui n'est pas triste non plus. Ce n'est pas une critique, mais simplement l'obligation d'un bricolage soigné.
-
C'est effectivement bizarre, l'angle est en principe inscrit en mémoire non volatile du µcontrôleur, il ne devrait pas changer suite à un power-off. Bah, cela fait partie des curiosités curieuses que nous concoctent nos engins de mort, il faut parfois renoncer à comprendre. Si le nouvel angle est inférieur à 3° (c'est le biais max de l'accéléromètre de tangage utilisé en inclinomètre), tu peux refaire une calibration à l'angle qui te convient. Par contre, si le "très fortement" veut dire 30 ou 40°, c'est une panne et la roue te refuse à bord.
-
En français on dit "peu de personnes n'aient réagi", autrement c'est incompréhensible. Sur le forum anglais, ils sont à la page 7 pour commenter l'accident, et page 7 pour l'appel aux dons. Notre forum est aussi en page 7, il n'a donc pas à rougir de son "score". L'accident est infiniment dramatique, avec des dégâts corporels monstrueux... dont nous sommes partiellement responsables en demandant toujours plus de tests extrêmes. Oui, on peut organiser un concert pour larmoyer ensemble, pertinent ou pas ?...
-
Un exemple où toutes les cellules sont OK mais le pack ne sort rien : https://www.youtube.com/watch?v=nTk2B_e4iaY Déconstruction d'une batterie : https://www.youtube.com/watch?v=Gq-LTcg9ymU J'imagine que la quasi absence de tension en sortie pack est dû à la perversité des 3 mosfets ici : Il fût un temps où l'on court-circuitait ça sur nos vieilles roues quand on utilisait un pack générique... Ceci dit, en principe les alarmes actives comme celles-là sont "pour notre bien"...
-
Oui, oui, oui, quand il est bien monté... Et le centrage de ce pneu tubeless, eh bien, c'est pas du gâteau. Bon, fatigué par une tendance au wobble dû à un décalage latéral du pneu sur sa jante, j'ai essayé de le débalourder/centrer. Pour la première fois de ma vie, j'ai utilisé du liquide vaisselle (parfum évasion exotique ), puis j'ai trituré tout ça... un certain temps. Au final, c'est mieux, presque plus d'oscillations latérales, mais un certain décentrage vertical peu discernable en roulant (sur des routes pourries).

-
En bref, en accélérant une roue consomme du courant, en décélérant elle en restitue une partie. Pareil en montant ou descendant une pente. Attention : si on descend une grosse pente avec la batterie pleine, on se casse la gueule...
-
Cela semble être en effet un polyswitch de protection de l'alim auxiliaire du phare. Par nature, comme un simple fusible d'ailleurs, c'est un composant chaud. Mais, sentimentalement, c'est un peu ambitieux d'utiliser un petit boîtier 1206 pour sécuriser le courant. Les concepteurs ont probablement cascadé les alims auxiliaires, c'est à dire que le 5V logique serait issu du 12V... d'où une surcharge du 12V qui pourrait conchier le 5V ? Perso, je monterais 2 boîtiers 1206 l'un sur l'autre. Cela rendra la disjonction un peu moins borderline, en minimisant le point chaud (encore une fois, il est "normal"), le but est d'éviter un incendie en cas de problème (genre court-circuit), et non pas de tuer le pilote. Cependant, si c'est l'alim 12V qui est trop juste, cela ne résoudra pas forcément le souci... Le phare est peut-être trop puissant pour cette carte mère...
-
Mmmhh, ça me rappelle ma galère pour mettre en route ma v11. A priori, 2 notions distinctes (si j'ai bien compris) : -- sortir du mode transport -- activer la roue. Pour sortir du mode transport, il semblerait (?) que mettre en charge devrait suffire, ce qui paraîtrait logique. (peut-être, quoi que, mais bon...) Pour activer la roue, il faut un gsm "kivabien" (ce n'était pas mon cas, une liaison wifi+tablette Androïd 4.5 n'a pas suffit). Puis répondre à plein de questions (préférences sexuelles, religion, bord politique..etc..), et si vous avez de la chance et que votre profil est acceptable, vous serez autorisé à bord. Coup de pot, ma v11 réveillée mais pas activée acceptait d'être trollée (mais pas chevauchée). Donc je l'ai poussée chez le revendeur parisien. . J'ai l'impression qu'il y a maintenant une 3ième notion : -- déverrouiller la roue Oui, faire de la roue est vachement élitiste...
-
Une v14 avec un double leash court. Étonnant :
-
Sur la v11 première version, et même sur la seconde un peu améliorée, les fixations par œillets dans les coins hauts des carters de selle sont TOTALEMENT INDIGNES. Je ne sais pas où en est la Y, j'ai peur que ce soit pareil. En clair, les pads qui ajoutent fatalement de grosses contraintes de torsion/glissement ne sont pas forcément une bonne idée...
-
Begode C8 (16p/84v/1500wh/31kg/suspension)
Techos78 a répondu à un(e) sujet de Fabien Wheel dans Begode
J'ajoute que les roues lenticulaires aussi... Bon, pourquoi pas, c'est un retour aux fondamentaux, mais je la trouve quand même un peu épaisse... -
Oui, cela marche pour les petites perforations (vécu). Si tu utilises une bombe pour voiture, ne pas tout mettre (c'est trop). Pour les slime ou liquide à la seringue, il faut démonter l'obus. De toute façon il faut en acheter car ils deviennent tout crado et posent problème lors des regonflages ultérieurs.
-
Non, un simple colis, mais peut-être avec un peu de retard
-
Ouais, 120km d'autonomie avec 900Wh, je ne sais pas ce que fume l'IA mais je veux la même...
-
Sur ma V11, on peut valider la disjonction moteur lors d'une monté en vitesse incohérente (trop rapide). .



