Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
J'ai vu Duf démonter l'amortisseur, je ne l'ai pas vu démonter la suspension. Oui, avec l'allongement du débattement des derniers modèles, le porte pédale a un large talon et le profilé bizarre est plus long (il me semble) Mais je soupçonne que cette roulette soit toujours là... Mécaniquement elle serait bien placée pour supporter le poids du pilote. De plus elle serait mieux encastrée, Mais un passage de roue n'est pas une salle blanche classe 10, la merdasse s'accumoncelle, une techno à galets est hautement déraisonnable. Tout cela au conditionnel puisque cette glissière n'a toujours pas été documentée depuis 4 mois... d'où mon "coup de gueule" (modéré) sur cette "conjuration du silence". Par contre, IM lors de son démontage nous a très bien montré, en insistant, que pour fixer un boîtier TO-220 il faut un canon isolant épaulé. Trop chouette IM, merci.
-
Je ne sais toujours pas répondre... Les chronos d'enfer, les paysages à couper le souffle, les descentes d'escaliers, ne m'intéressent que moyennement. Je caresse l'espoir insensé de savoir un jour comment est faite cette suspension. Cela progresse dooouuuucement, Duf nous a montré comment changer les amortisseurs, de sympathiques pistons très simples, ça se présente plutôt bien... mais, comment la "selle" coulisse ? ? ? Circulez, ya rien à voir, silence assourdissant. On peut apercevoir un genre de galet plastique blanc en partie basse : Bien exposé aux salissures, le principe me choque, quel que soit le matériau, polytétrafluoroéthylène ou couenne de jambon. Fiabilité ? Maintenance ? La v11 se destine (?) aux environnements propres... j'espère me tromper car cette roue a de sérieux atouts, un moteur très innovant, il y a (comme d'hab) de très belles photos sur le site russe ecodrift, qui nous apprend qu'il faut acheter des tournevis de sécurité à empreintes triangulaires . Un stator magnifique, une fonderie exemplaire !


-
<hs>A propos du verbe introfubiliser. Terme relativement populaire signifiant simplement introduire, avec une franche idée de pénétration mais sans connotation sexuelle. Utilisé surtout au 19ième siècle, mais repris quelquefois par des ouvriers ou mécaniciens (introfubiliser une cheville...) . Exemple d'un texte de 1907 mais d'origine plus ancienne : </hs>
-
Bon, le sujet n'est pas la crevaison.... quoi que.... La quantité de vis que Inmotion a introfubilisé dans sa roue est proprement hallucinante. Ce n'est pas une critique, c'est la conséquence des exigences d'étanchéité que beaucoup de clients réclament. Sur un vélo, on peut calmement changer la chambre en 10 mn, sur la v11 inutile d'être très futé pour deviner que ce sera un peu plus long, et difficilement réalisable au diable Vauvert (comme disait le gros Léon). Alors, on met du Slime ? On brûle un cierge à St Christophe ?...

-
Oui, la maintenance d'une roue ne nécessite pas une compétence extraordinaire, ni un outillage hors du commun. Le problème n'est pas vraiment là. Le problème est que dès qu'on touche à une roue, on y passe des heures, parce que c'est mal branlé. Tu nous parles de chicway, mais ce ne sont pas eux qui mouilleront la chemise, ce sont les clients et ça fait une sacrée différence, vu les tarifs horaires peu compressibles que peuvent appliquer les boutiques... Bon, j'admets que la situation s'améliore, l'accessibilité mécanique devient meilleure sur les roues récentes. Mais cela reste quand même pénible. Exemple : j'ai crevé hier en revenant du lac de St Quentin, 15 bornes de poussette sur une roue qui n'a pas de trolley (ouch, mes reins...), eh bien j'attends "une grosse motivation" pour désosser la ks18s , avoir une roue de secours est parfois bien utile.
-
Ah ? Guillaume a laissé tomber ? Diable, il m'a offert 3 ou 4 fois un pot lors des randos e-roue, et j'avais toujours en tête de lui acheter un pneu ou autre... Zut alors, j'ai horreur d'avoir des "dettes"... Pour les autres boutiques, je manque d'expérience(s) et je n'ai pas cherché à être exhaustif...
-
Une demande d'accélération caractérielle ne peut probablement pas venir d'un faux contact de câblage, qui interviendrait n'importe quand. Il y a la commande au guidon, poignée tournante ou gâchette. Dans ces deux cas, le système est le plus souvent basé sur un capteur à effet hall (à sortie analogique) avec un aimant qui passe devant. Cette fonction nécessite 3 fils : l'alimentation +5V , le 0V et la sortie analogique que l'on peut mesurer au voltmètre et qui bouge grosso-modo entre 1V et 4V. Si ce signal est correct, c'est que le contrôleur le gère mal et c'est lui qui est en cause. Hypothèse : il est possible que le contrôleur ne soit pas bien configuré, par exemple il peut attendre une impulsion PAS (pédalage) qui bien sûr n'arrive jamais en configuration draisienne... Je n'en sais pas plus...
-
Si je voulais acheter cette v11 (qui me plait incontestablement), j'irais, dans l'ordre de mes préférences : -- Gyroroue shop, gérant Sylvère , -- E-roue shop, gérant Guillaume, Et dans une moindre mesure Urban360, que je ne connais pas, qui a un sav techniquement correct mais une facturation "agressive".
-

Vidéos d'apprentissage
Techos78 a répondu à un(e) sujet de King Size dans Tutoriaux et Apprentissage
Euh, je te déconseille de manger des haricots... -
Salut @Gueddon , bienvenue sur le forum, Je me demande si ton style n'est pas un peu concis, si, si. . Un minimum de précision peut rendre cette excellente proposition un peu plus séduisante : tu es débutant ou confirmé, avec une mini ou grosse roue, pour une courte ou longue rando..???. 3 critères décisifs, voir rédhibitoires...
-
Vidéos d'apprentissage
Techos78 a répondu à un(e) sujet de King Size dans Tutoriaux et Apprentissage
Ouais, de là à conclure que les plongeurs sont des chochottes... Tiens, on parle quelquefois de la masse des mammifères marins (plus ou moins humanoïdes), eh bien c'est raté : ce n'est pas la baleine bleue le plus gros animal de la Terre (la planète) mais les sauropodes qui affichent 40 mètres de long et entre 80 et 100 tonnes. Edit : euh, je voulais dire : qui affichaient... ouf. -
Vidéos d'apprentissage
Techos78 a répondu à un(e) sujet de King Size dans Tutoriaux et Apprentissage
On peut apprendre seul, en s'aidant d'accessoires (roulettes, bâtons de marche, caddy de supermarché...), ou bien se faire tenir par quelqu'un. Attention, dans ce dernier cas, un wheeler peut mettre en danger l'accompagnant. Il faut garder en tête la blessure qu'a subi @Hirsute en soutenant un débutant : rupture d'un tendon dans un bras, ce qui est une véritable catastrophe pour un acrobate professionnel... (non, ce n'est pas lui sur la photo, pour ceux qui ne connaissent pas, cherchez bien, il y a un indice ).
-
Menfin, personne n'a un môme qui pourrait/voudrait apprendre la roue ? Bon, faut dire, Bézier c'est le bout du monde...
-
Le seul combat de boxe qui m'a fait sourire :
-
C'est vrai, l'axe Solowheel ressemble à celui des msuper (clavettes+écrou), avec des rupture fréquentes. Exemple sur la Xtreme : Solowheel Xtreme Bon, pour la GT16 c'est une bride simple, comme KS...
-
Rhôôô, ça c'est du freinage !

-
Prenons un autre exemple. Le coût de production (tissus compris) d'un T-shirt est environ 1€/500 pièces , 0,5€/1000 , 0,2€/5000. Il est revendu 9,99€ ici. Si une couture lâche au bout d'1 an, essayez donc de le faire réparer/remplacer .
-
J'imagine (?) que tu parles de l'axe moteur, ta photo gauche semble montrer un manque de // entre support pédale et carter moteur. Si c'est bien l'axe moteur... eh bien ce n'est pas gagné. De mémoire, je n'ai vu un changement d'axe uniquement sur une Solowheel, la méthode habituelle est de changer tout le moteur (oui, c'est un scandale). Hors, une manipe récente montre que même chez KS, l'axe peut s'extraire relativement facilement (emmanchement à force sur cannelure légère, goupille rectangulaire). Il faudrait vraiment pouvoir acheter ce bon sang d'axe, d'une fiabilité catastrophique... Quant à la compatibilité des axes de marques différentes, j'ai l'impression (?) qu'ils ont tous le même diamètre 17mm, (donc les mêmes roulements) mais la fixation au porte pédale est différente (bride, clavettes+vis...). De ce point de vue, la roue idéale est l'IPS i5.
-
FAQ Utilisation de la batterie - Infos et intox
Techos78 a répondu à un(e) sujet de Crypto83 dans MiniMotors
résistance de contact ... 20 Ohm ! ! ! résistance d'isolement ... maximum 1 kOhm ! ! ! et c'est quoi le mini mais sous 220 V ça fait déjà 48 Watts ! Les mathématiciens ont tendance à utiliser ε (epsilon) pour désigner les petites quantités, moi je l'utiliserais pour quantifier mon degré de confiance en ces specs... -
Salut @Weiqi , bienvenu sur le forum... a priori pour un passage express... . Je te confirme que plus on est "vieux", plus l'apprentissage est laborieux. Même avec une souplesse corporelle et des réflexes corrects, notre corps a du mal à intégrer les bonnes attitudes. Mais il faut aussi un tempérament un peu "joueur", et il faut que l'environnement s'y prête, Traverser son garage, suivre un mur sur 10 mètres...etc, des victoires vraiment jouissives... Bah, il ne faut pas (trop) se forcer, et si tu ne le sens pas, tu as raison d'abandonner. Bonne vente...
-
Les capas, ouais, c'est vrai que je suis tombé de ma chaise quand j'ai vu la Veteran avec des 560 µF... Un moteur 2,5 fois plus puissant mais des capas 4 fois plus petite... Bref, passons. Dans pistes de cuivre sur la carte imprimée, la densité de courant atteint des valeurs colossales. J'imagine que l'épaisseurs n'est pas le 35µm standard mais du 70µm, mais même avec ça, euh, les électrons se bousculent . Surtout que là, on est en découpage sec, donc un spectre large, et en hf la répartition du courant n'est pas homogène : il y a l'effet de peau (le courant en périphérie) et aussi les boucles de câblage qui tendent à minimiser leur surface. C'est un phénomène que j'ai étudié de près, quand on a une piste qui conduit un signal à fréquence élevée, et que le retour est un plan de masse (une couche dédiée au 0V), eh bien le courant de retour suit exactement le trajet du signal, car il ne suit pas le chemin de moindre résistance, mais le chemin de moindre impédance. Comme la self est proportionnelle à la surface de la boucle, cette surface se réduit "automatiquement". L'inductance d'un fil rectiligne est de l'ordre de 10nH/cm. C'est très visible à la caméra thermique. J'en parle simplement parce que ce n'est pas très connu.
-
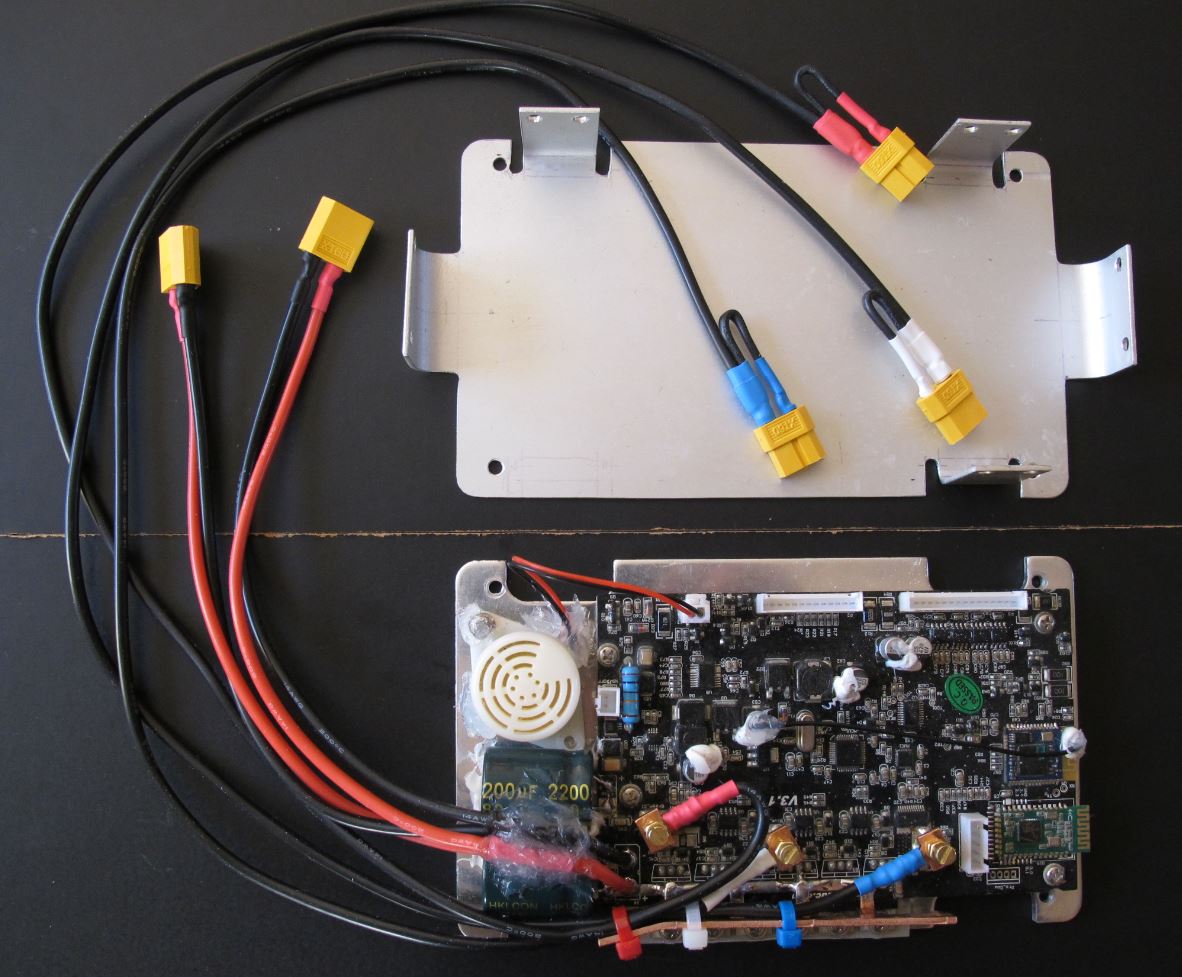
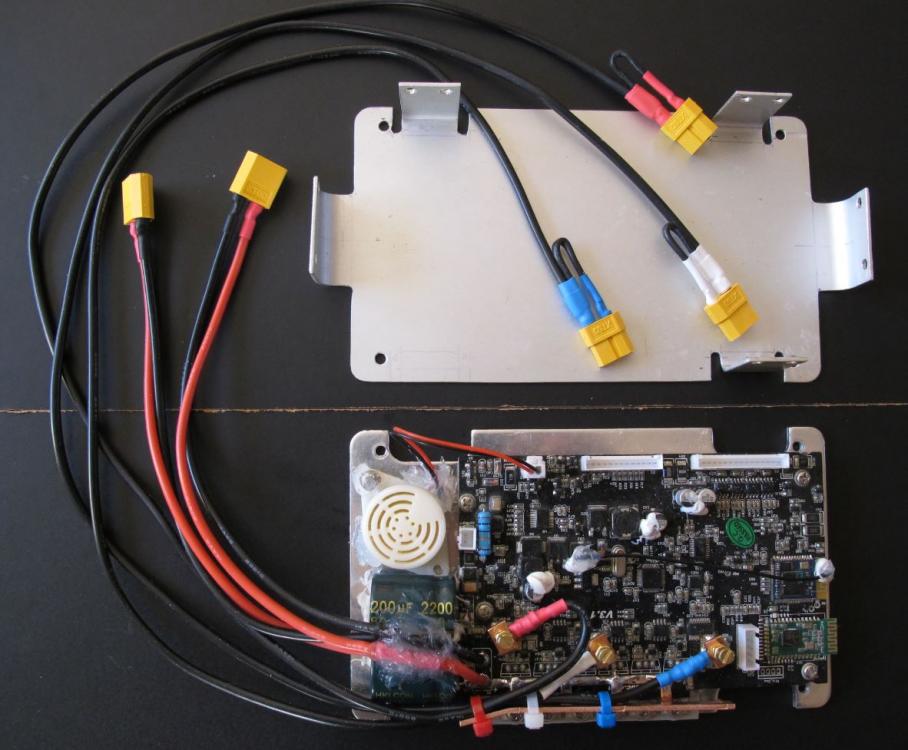
Il faut un fil qui tienne bien la chaleur, avec un isolant pas trop épais. Un isolant Teflon serait idéal, mais il sont souvent assez raides. Je n'ai pas dit qu'il y en avait chez Conrad... C'est possible, ou pas... Sur la 18a les fils moteur sont connectés à la carte mère par des cosses. L'isolant de ces cosses était relativement fondu, j'ai donc fabriqué des cosses en cuivre épaisseur 2mm, les fils frettés par une queue de cochon et le tout soudé. Les vis sont en laiton, avec rondelle élastique. Les fils moteur chauffent beaucoup, il ne faut pas qu'il soient en contact direct avec les batteries car ils peuvent faire des trous dans les gros rétractables. J'ai ajouté des connecteurs sur les fils moteur pour faciliter les interventions. Pour un montage en // des batteries, j'ai mis 2 arrivées d'alim. Une petite barquette alu complète un peu le radiateur, mais surtout elle permet de fixer sérieusement les fils. Bon, en terme de précautions, c'est un peu trop copieux, je ne conseille pas toutes ces bricoles. Par exemple, les grosses pistes de circuit imprimé qui alimente la rangée de mosfets sont renforcées par des fils soudés dessus...
-
Douleur sous pied normale ?
Techos78 a répondu à un(e) sujet de Marcp dans Tutoriaux et Apprentissage
<hs> Pour les jeunes bizuts (pléonasme) qui ignorent ce qu'est le talon-pointe en pilotage automobile, c'est (ou plutôt c'était) une méthode pour rétrograder rapidement en freinant avec la pointe du pied droit, débrayage pied gauche, relance du moteur avec le talon sur l'accélérateur (en continuant à freiner), passage de vitesse et ré-embrayage au bon régime. Il y a un siècle, j'ai eu une voiture un peu sportive avec les pédales au bon endroit qui permettaient ce genre de chose. </hs> -
Excellent, donc l'extraction n'est pas inhumaine, c'est une bonne nouvelle. Il doit être aussi possible de créer un extracteur à l'aide de tiges filetés, un peu comme un compresseur de ressort de suspension de voiture... Là, je n'ai pas trop compris. Tous les fils sont soudés à l'étain, je suppose qu'il y en a un qui est dessoudé. Il y a : -- les 5 petits fils des sondes de hall, repérés par couleur (2 fils pour l'alim, 3 fils pour les signaux). -- les trois phases qui arrivent sur des épissures, le moteur est bobiné avec environ 12 fils (émaillés) en main. -- le point central du câblage en étoile, grosse épissure également masquée par un isolant fibre de verre Les pièces polaires sont un multiple de 3 ( il y en a 63 ) et bien sûr le nombre d'aimants est différent et paire ( il y en a 56 ). Chaque phase s'enroule autour d'une pièce polaire sur 3, donc 21 fois puis atteint l'épissure centrale. Tous les solénoïdes sont bobinés dans le même sens. Exemple : Mais peut-être que tu veux remplacer un fil moteur et tu demandes où en trouver... Ben je ne sais pas, quand je bricole, je commande souvent des trucs chez Conrad...

-
J'adore cette photo : Elle relativise beaucoup la notion de "progrès"...