
Techos78
-
Compteur de contenus
7793 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Excellent, donc l'extraction n'est pas inhumaine, c'est une bonne nouvelle. Il doit être aussi possible de créer un extracteur à l'aide de tiges filetés, un peu comme un compresseur de ressort de suspension de voiture... Là, je n'ai pas trop compris. Tous les fils sont soudés à l'étain, je suppose qu'il y en a un qui est dessoudé. Il y a : -- les 5 petits fils des sondes de hall, repérés par couleur (2 fils pour l'alim, 3 fils pour les signaux). -- les trois phases qui arrivent sur des épissures, le moteur est bobiné avec environ 12 fils (émaillés) en main. -- le point central du câblage en étoile, grosse épissure également masquée par un isolant fibre de verre Les pièces polaires sont un multiple de 3 ( il y en a 63 ) et bien sûr le nombre d'aimants est différent et paire ( il y en a 56 ). Chaque phase s'enroule autour d'une pièce polaire sur 3, donc 21 fois puis atteint l'épissure centrale. Tous les solénoïdes sont bobinés dans le même sens. Exemple : Mais peut-être que tu veux remplacer un fil moteur et tu demandes où en trouver... Ben je ne sais pas, quand je bricole, je commande souvent des trucs chez Conrad...

-
J'adore cette photo : Elle relativise beaucoup la notion de "progrès"...
-
Eh bien, voilà une manipe très couillue et une banque d'image particulièrement prolixe. Bien bien bien, il faut maintenant habiller tout cela avec de jolis commentaires... Pour situer le contexte, je précise que je suis très concerné par ce sujet car j'ai une ks18s "cassée" dans mon s/sol ( c'est pas la mienne, ouf )... Pour commencer, quelques questions : >>1>> Est-ce que tu as des pistes d'approvisionnement pour l'axe ? En ks18a (1 trou) et/ou en ks18s (2 trous). Parce que, hormis l'intérêt technique, lever le petit doigt n'est pas trop utile si l'axe est introuvable... Il est peut-être possible de faire réaliser des axes sur mesure, il me semble que @Erwanrcx avait envisagé cela... >>2>> Comment se passe l'extraction : maillet, masse+cale en bois, presse... on voit une cannelure légère, cela semble pouvoir sortir assez facilement, à température ambiante... Question annexe : la goupille est-elle bien ajustée, ce qui n'était pas du tout le cas de certaines Monsters, sans parler des Inmotions qui font cloc-cloc... >>3>> Je ne comprends pas pourquoi tes 2 carters moteurs sont rayés côté externe. En principe, c'est la coque qui touche en périphérie. Pour rayer près de l'axe, il faut vraiment que le porte pédale soit desserré et en travers, ce qui veut dire que les trous de fixation de la coque sont probablement brisés. Quelques commentaires, Je remarque que ce moteur est extrêmement propre. Il y avait quand même un léger problème au niveau de l'axe : les deux portées de roulement sont lustrées (surtout côté goupille), ce qui veut dire que les roulements tournaient sur l'axe. Quand j'ai changé ces roulements sur ma ks18s, un seul côté était comme ça. L'ajustement axe-roulement n'était pas parfait (h7g6 ?) et donc les vibrations de roulage ont créé une légère rotation, indésirable mais pas très gênante. (phénomène de précession mécanique). Je précise que j'ai mis des roulements skf juste par sécurité, les roulements chinois étaient très corrects. Quand on regarde les pièces polaires du stator, on voit que le feuilletage externe est (légèrement) en éventail. Je pense que cela participe au bruit moteur, les tôles au silicium doivent "applaudir" à fréquence élevée, d'où ces sifflements aigus pas très agréables. C'est le même problème avec certains transfos ou relais secteur, mais là c'est du 100 Hz. Remarque générale, Je pense que les méplats des bouts d'axes sont trop prononcés, c'est trop fragile. Ces parties planes sont là pour indexer les portes-pédales et les empêcher de tourner l'un par rapport à l'autre. Mais ce couple différentiel inter-pédales n'est pas très grand, même si le pilote est sur le talon d'un côté et sur la pointe de l'autre. Quant au couple moteur, il est misérable. Si j'était concepteur de roues, je laisserais le méplat tel quel en bas (côté porte pédale) mais je laisserais l'axe cylindrique en haut côté bride. La bride n'a pas besoin d'appuyer sur une partie plate. A mon avis, cela rendrait l'axe indestructible... et moins coûteux à réaliser, y compris pour la bride. Juste une idée valable pour KS, mais pas pour Gotway dont les clavettes doivent nécessairement être symétriques. Il me semble que GW a diminué ces méplats sur les dernières Monster, ce qui a été présenté comme un renforcement de l'axe... qui a gardé son diamètre initial. (à confirmer)
-
Je remonte le sujet. Alors, cet afficheur (pour GW), il en est où ? @Hansolo , toi qui l'a testé, tu as des infos ?

-

Douleur sous pied normale ?
Techos78 a répondu à un(e) sujet de Marcp dans Tutoriaux et Apprentissage
J'ajoute une 3ième recommandation à celles de @WheeLoic : 3- en roulant, soulever talon, pointe, gauche et droite de temps en temps. Cela facilite la circulation au niveau de la voûte plantaire. C'est d'ailleurs ce genre de chose qui m'a fait choisir la vieille ks18 haute et confortable, sur laquelle le one-foot est un vrai plaisir. Sur la ks16b le one-foot est un réel déplaisir... -
Gonfleur électrique (portable) ou ... à pied/main ?
Techos78 a répondu à un(e) sujet de damsleouf dans Équipements
Un compte rendu très complet de Sylvain... auquel un peut ajouter un petit serflex autour de la jonction d'embout . J'utilise volontiers un électrique "très ancien" qui date d'environ 2 ans : Le raccord est moitié rigide, moitié souple. il faut choisir l'unité pour le mettre en route, il est un peu bruyant, l'autonomie est correcte, il fait le job. Intéressant, on voit ce jeune asiatique (08:50) qui gonfle sa v11 neuve, il renonce à la pompe manuelle pour un gonfleur électrique, compacte avec un afficheur géant. Très rapide et pas très bruyant, le volume d'air est modeste mais la pression est élevée. Remarque : la vidéo est inversée : il dévisse pour visser. Il ne semble pas avoir (trop) de fuite en dévissant. Car c'est ça le problème des valves Schrader : deux actions décalées : étanchéité avec le corps de valve puis ouverture du clapet. Ces deux actions sont difficiles a obtenir lors d'un vissage simple. On peut chercher à accélérer le mouvement (raccord "pompiste") ou bien passer à la double commande, l'ouverture du clapet à l'aide d'un levier, ou bien le système luxueux ci-dessous coudé, avec deux boutons moletés. Très cher car comportant des joints étanches sérieux :

-
Oui, ici, le condo épris de liberté est un dégât collatéral dû à la destruction de la carte. On peut d'ailleurs s'étonner qu'il n'y ait pas vraiment les habituels pâtés de colle blanche. Inutile de faire 40 fois le tour du problème (voir 8 posts + haut), on est en limite techno : et pour débloquer la situation, je ne vois qu'une solution : >>> il faut augmenter la taille des roulements, puis ajuster la gauge des fils en conséquence, ainsi que la carte mère. C'est ça le point bloquant : continuer à utiliser un axe Ø17 qui impose des petits fils et fragilise le châssis est totalement absurde et quasi ingérable. Mais sur sa V11, Inmotion montre l'exemple... Vraiment, si une Veteran V2 pouvait se doter d'un arbre (creux) digne de ce nom, cela résoudrait bien des problèmes.
-
[VENDUE] KS18S 1680Wh pour pièces (axe cassé)
Techos78 a répondu à un(e) sujet de Minch dans Pièces détachées
@bornil.jacky9 : sur la 18s, les 3 phases sortent d'un côté et les 5 fils de sondes de l'autre. On aurait pu espérer un peu plus de matière dans les axes par rapport à la 18a... Raté. Je pense que tailler un méplat avec un angle vif est une vraie connerie. Mais les amorces à la rupture sont souvent négligées parce que c'est plus simple de mettre un coup de fraise standard, les congés nécessiteraient des fraises spéciales... J'imagine que ces axes sont taillés dans des barreaux laminés à chaud qui permettent un bon fibrage du métal. Une soudure est possible, l'apport de métal étant hétérogène, avec risque d'inclusion de scories, la pièce sera moins solide... Mais c'est surtout au niveau du traitement thermique que c'est la cata. il faut probablement (?) commencer par faire revenir l'axe, le souder, le ré-usiner puis lui ré-appliquer un traitement thermique correcte. Cela suppose avoir déposé l'axe... donc cela n'a pas de sens, il faut changer l'axe par un neuf. -
[VENDUE] KS18S 1680Wh pour pièces (axe cassé)
Techos78 a répondu à un(e) sujet de Minch dans Pièces détachées
Ouais, bah, que dire, cassé comme d'hab au raz du méplat... Ah, si ce méplat était vertical, ce serait plus solide, mais la bride serait inefficace. Un détail anecdotique : en roulant, ce support pédale ne peut pas frotter sur le carter moteur, c'est la coque qui fléchit et qui frotte. Donc cette roue ne fait pas le bruit de cloche en tapant le flasque, contrairement à la majorité des roues. Sur cette photo, on aperçoit très légèrement la large trace blanchâtre au dessus de l'inscription KS.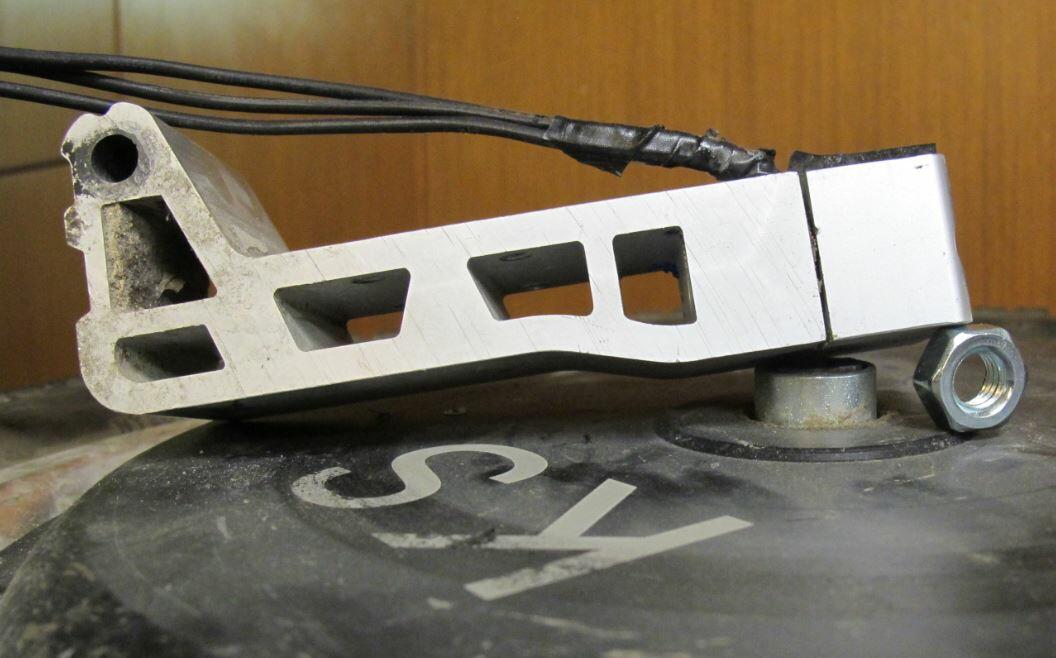
-
Il existe des pédales tout-terrain :
-
[VENDUE] KS18S 1680Wh pour pièces (axe cassé)
Techos78 a répondu à un(e) sujet de Minch dans Pièces détachées
Je confirme, cette roue est pour l'instant chez moi à St Rémy-lès-Chevreuse : A noter : coque état neuf, @minch est un gars très soigneux... Edit très tardif : non, elle n'est plus chez moi.
-
On n'a vraiment pas les mêmes centres d'intérêt (et c'est tant mieux). Perso, qu'elle roule à 50 ou 70 maxi, cela m'indiffère totalement. Savoir que le moteur est très pêchu me suffit. Quand j'achète un sandwich, je préfère savoir ce qu'il y a dedans. J'aimerais donc vraiment comprendre comment coulisse la "fourche", on sait maintenant qu'elle est juste habillée avec du plastique, et qu'il y a un amortisseur tout simple, qui peut facilement se changer, c'est une bonne nouvelle. On a pu voir la fixation haute sur les tiges de suspension... Cela semble (?) indiquer que les amortisseurs assurent le guidage haut. Cela n'aurait rien de scandaleux, dans nos voitures avec un train avant MacPherson l'amortisseur assure le guidage (et en + la rotation). Tout va bien... si les tiges sont dimensionnés en conséquence... là, les tiges ne sont guère plus grosses qu'une valve Schrader... Est-ce que les tiges vont plier dès que la roue se couchera un peu violemment ? Il y a forcément un guidage supplémentaire, surtout pour la partie basse du ∩ ... Alors... Cela n'a rien d'anecdotique. On voit clairement les guidages sérieux de la s18 et de la future GW. Bon sang, ça m'énerve, dans la v11, c'est foutu comment ?
-
Faut pas hésiter : hop, un saut chez Casto-Merlin pour acheter le taraud qui va bien (M10), même pas besoin de tourne à gauche, une clé à molette suffit. Et si tu es fortuné je te conseille le jeu de 3 tarauds : dégrossisseur-intermédiaire-finisseur , c'est la classe. Et peut-être que ce taraud resservira pour nettoyer la crasse car ces trous se salissent facilement, dans les pire-cas cela coince les vis cuvettes. La bonne habitude serait de boucher les trous avec un bouchon, une boule Quies, un chewing-gum ou une tranche de jambon...
-
[PROJET] Batterie portable / range extender pour 99€
Techos78 a répondu à un(e) sujet de Koxx dans Bob la Bricole
Beau projet, technique et aussi commercial, car entrer dans un budget aussi serré n'est pas facile. Je n'ai pas grand chose à dire, hormis qu'il faut trouver le convertisseur boost qui-va-bien, c'est à dire qui puisse être réglé au poil en tension et qui soit parfaitement stable en courant pour faire office de chargeur. Un détail : lors des réglages, si ta trott n'a pas de diode anti-retour sur le port de charge, certains boosts n'aiment pas trop avoir de la tension à leur sortie et la régulation déconne. -
Pas sûr que Le Concombre Masqué soit très connu, sauf par les vieux lecteurs de Pilote ?. Je ne le connais pas trop, je crois que quand il retire son masque, les yeux viennent avec .
-
Ooops, XXL met la barre haute pour ses blagues : les flammes vertes peuvent s'obtenir avec du sulfate de cuivre : Bonne réactivité des techniciens Sherman, des propos cohérents... ils sont visiblement sérieux. Wait and see.
-
La photo au dessus montre que Inmotion utilise un moyeu géant, avec un roulement de très gros diamètre, dans le même esprit que l'invention de Rockwell (jamais exploitée) : Rockweel Le bout d'axe ne pourra pas casser : il n'y en a plus. Pas étonnant qu'elle soit si lourde, vois avez vu le nombre de vis ? L'intégrité devrait être meilleure que la s18 qui semble disperser des bouts de coque assez facilement.

-
Je confirme, c'est totalement fou. Il est très dangereux de dépasser 30 km/h avec un moteur de 800 Watts. même vitaminé à 74 Vnom. Si certains essayeurs le tente, c'est courageux, merci à eux, mais il ne faut pas se baser sur ces chiffres. Si on peut maintenir l'accidentologie des e-roues à un niveau raisonnable, ce ne sera pas plus mal...
-
Mmmmhh, étymologie suspecte, tbc (to be confirmed)... Belle prestation pour cette mini-roue, un "jouet" tout à fait exploitable, qui nous change des maxi-roues hyper véloces.
-
J'ai jeté un cil sur votre site, il est très bien, j'ai juste un peu réagi sur la première phrase : " La gyroroue est un engin électrique individuel de déplacement urbain ..." Le dernier mot me perturbe... Oui, je connais la législation, et, euh, comment dire, ... Bon je plaisante bien sûr, votre initiative est vraiment super, bon courage.
-
Bien vu, il faut effectivement retirer les fixations carte + les 12 vis traversantes des mosfets... Le barreau radiateur ne tient (?) que par 4 vis, que Marty avait resserrées sous prétexte de légères vibrations roue statique à vide.
-
Poukram, ce n'est pas un simple sous-dimensionnement de capas comme je le pensais un peu rapidement, mais carrément une destruction totale de la partie puissance de la carte... Que dire, que dire... Assurément Marty qui se lance dans une grosse ascension avec la carte déjà à 65°C, c'est plutôt osé... mais c'était un test extrême et on peut remercier Marty de nous montrer la frontière du déraisonnable... Thank you Marty, good work. Edit : gros coup de pot, je pense qu'il est passé à deux doigts de l'incendie, une carte qui charbonne devient conductrice, et relativement inflammable... <hs> il y a 3 semaines, c'est mon grille-pain qui a commencé à cramer. Je l'ai mis dehors, il faisait de belles flammes, qui ont nécessité un coup d'extincteur. </hs>
-
Changement de trolley d’une ks 16s suite crash 😥
Techos78 a répondu à un(e) question de damsleouf dans Questions / Réponses
+1 , +1, +1 ... -
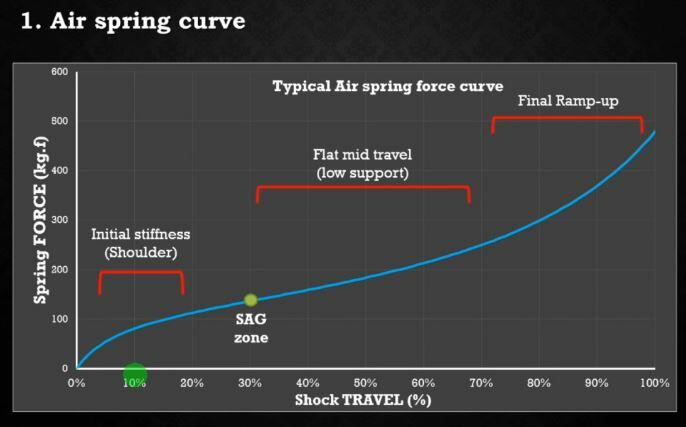
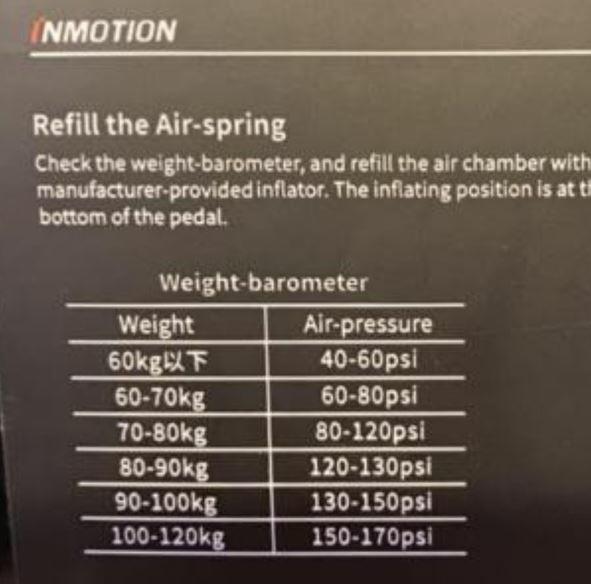
Si j'ai bien suivi, il a été question de monter des amortisseur sans la valve de chambre négative (un pb de coût ou d'appro) mais il y avait bien sûr une chambre négative gonflée en usine, car elle est indispensable. Cela a fait pas mal de remous sur le forum anglais, c'est peut-être la cause du retour de cette valve : Mais il faut que les pilotes apprennent par cœur ce graphique, la chambre négative permet l'inflexion du bas de la courbe Le SAG est la compression statique (pilote immobile), à régler autour de 30% du débattement selon son poids. Inmotion préconise ces pressions :

-
Sans vouloir troller, je constate que KS a fait ce qui me semble assez raisonnable : doubler le nombre de capas.


