Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-

Réception de ma GT16. Et ça commence pas terrible...
Techos78 a répondu à un(e) sujet de Murwolf60 dans Rockwheel
Eh non, pas d'accord : sauf quelques rares exceptions, les bms de e-roues n'ont pas de coupure intégrée. Contrairement aux bms génériques. Il n'y a pas les mosfets qui stoppent la fourniture de courant lorsque le courant de sortie est trop fort ou lorsqu'une cellule atteint son seuil bas. C'est uniquement la carte mère qui gère les tensions faibles en appliquant des alarmes de restriction puis un arrêt final, avec beaucoup de précaution. Malheureusement la carte mère mesure la totalité de la tension, et ne sait pas si un groupe de cellules est plus faible que les autres, il est donc prudent d'éviter de trop vider les batteries, et il faut penser à faire régulièrement un équilibrage. (une nuit complète en charge, voyant au vert). La sécurité du pilote passe avant la sécurité de la batterie, une coupure sèche serait inacceptable. La carte mère elle même garde une certaine réserve, juste pour assurer l'équilibre, le 0% de la roue est donc un peu décalé par rapport aux caractéristiques des cellules. -
Non, je n'ai rien sous la main. Ce bon petit gars Levy Batista s'est fendu d'un pdf : http://levybatista.com/img/documents/videos/HydroliqueSuspensions.pdf A mon avis, c'est relativement suffisant pour comprendre et, éventuellement, tenter de tracer quelques courbes sous Excel. Est-ce utile ?... Mmmhh... Pour moi, les théories thermo-dynamiques m'ont profondément fait ch incommodé et je me suis rapidement carré les détentes adiabatiques à un endroit que la décence m'interdit de préciser. Ceci dit, les softs modernes (Solidworks ...etc) comportent des simulations d'écoulements des fluides dans des situations pas trop perturbées (cavitation et autres). Surtout utile pour les masochistes. (pertes de charge dans les tuyaux, centre de portance en aéronautique...).
-
Il ne faut pas se plaindre, les cellules utilisées pour nos précieuses sont fiables et ne posent pas trop de problème à moyen terme. Mais en toute rigueur, on peut se poser des questions sur le respect des spécifications constructeurs. Dans le cas présent, la notion de pic de courant est trop vague, car nos bécanes consomment un courant pulsé. Faut-il considérer le courant moyen à la sortie du pwm des phases moteur, ou bien le courant crête effectif ? . Il y a bien des condensateurs de filtrage à l'entrée de la carte mère, mais ils ont des valeurs de + en + faibles même pour des moteurs de + en + puissants. Malheureusement, pratiquer le "qui peut le moins peut le plus" a des limites, cela m'inquiète un peu. Remarque : j'ai mis pwm au singulier car c'est le même pour les 3 phases moteur, il n'y a donc pas de pondération de courant due à la séquence triphasée. Et j'ai mis pwm au masculin, juste par goût car il/elle devrait être plutôt du sexe faible. (mais neutre en anglais).
-
Bon, c'est pas tout ça, mais il va falloir que les volontaires commencent à préchauffer les neurones. Ben oui, il faut quelques bases : Bon courage.
-
Ah mince ! Avec mon scooter DYU je croyais être au top du modernisme...

-
Le pilote ne ressent pas grand chose car il est toujours très proche de la verticale apparente. On pèse un peu plus lourd, c'est tout. Par contre, les freinages extrêmes peuvent se pratiquer "assis" comme ça :

-
Roues facilement démontables
Techos78 a répondu à un(e) sujet de chrismaz dans Discussions générales
Sur les roues récentes KS il y a un fil de chaque côté. On n'a pas encore confirmation pour la nouvelle S18 suspendue... mais l'axe a priori fixé par des brides inversées devrait faciliter les choses... ou pas car il faut sortir le garde-boue solidaire de la roue. A voir... Il y a 2 ans j'ai essayé d'imaginer une roue suspendue montée sur un bras oscillant (en jaune) qui permettrait de sortir la roue en débranchant les amortisseurs... C'était juste pour jouer.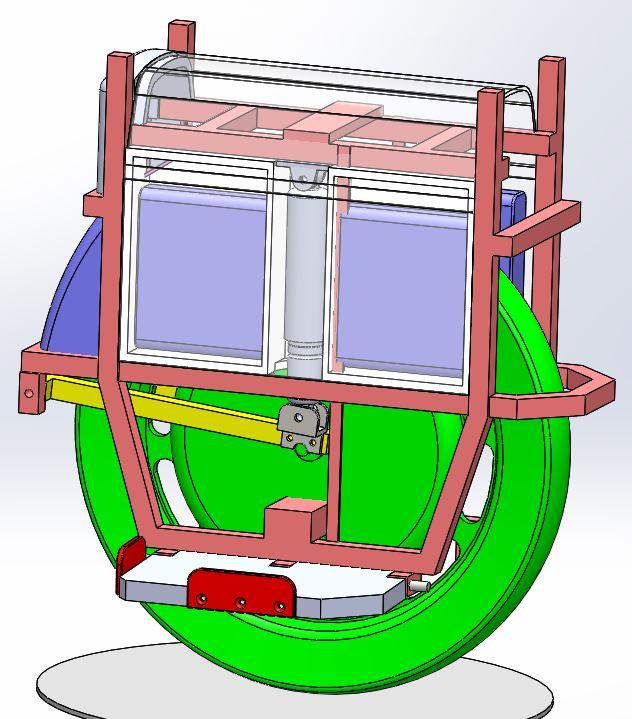
-
Kuji est un essayeur performant qui serait capable de nous faire rêver d'une brouette... Il est très longiligne, il m'impressionne quand il accélère en prenant des angles indécents. Il essaye des trucs déments que chacun pourra essayer d'imiter... selon son propre niveau. . Son saut sur place a une bonne amplitude, la suspension permet de bien planter la roue au sol pour profiter du rebond. Le réglage de l'amortissement devrait même favoriser le trampoline ou non, selon ses envies. Cela laisse présager des séances de réglage assez jouissives...

-
A peine croyable, Audi n'a pas remarqué que étron en français veut dire bâton merdeux... Mais c'est peut-être pour rappeler qu'il ne faut pas le laisser sur le trottoir...
-
Test de l'Ingo Bike par une nénette... pas douée du tout : Il y a une version aquatique :
-
DYU de FWheel (E-Slide, Takara, MoovWay...)
Techos78 a répondu à un(e) sujet de sbouju dans Draisiennes
Paaarfait, le contrôleur marche mieux quand on lui dit où est le rotor (grâce aux 3 sondes de hall) , ça lui évite d'avoir à faire des suppositions approximatives. C'est une confirmation intéressante. Merci pour cet compte rendu, ça me redonne la pêche pour retourner dans ma cave ( et il y fait moins froid )... Un détail : on dit silent bloc ou silent block, une expression rosbeef assez explicite, qu'on a un peu de mal à prononcer... -
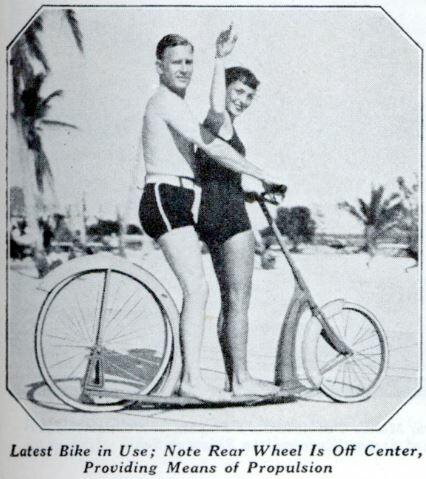
Une astuce rarement exploitée : la roue arrière décentrée permet la propulsion si on saute sur le deck... au bon moment :
-
En France : les serpents causent moins de 1 décès tous les 5 ans, et quelquefois ce sont les propriétaires eux-mêmes. Les guêpes sont plus dangereuses : ~15 décès par an. Les nouveaux frelons sont assez antipathiques...
-
Quelqu'un d'autre ? ? ?
-
Je proteste énergiquement... Tout dépend de la calculette qu'on utilise. Ce n'est pas indiqué... Il y a les calculettes qui effectuent les opérations en séquence, et celles qui tiennent compte de la priorité des opérateurs arithmétiques. Bon, le piège est subtil, en toute rigueur, il faut effectuer : p + (( g + 2c + 2p ) x c ) = 5 + ( 2 x 19 ) = 43 à peu près
-
C'est un défi ? Posons p=pompe , g=garçon , c=cornet on a : 2p + 2p + 2p = 30 --> p=30/6 --> p=5 g + g + 2p = 20 --> g= (20 - 10) / 2 --> g=5 2c + 2c + g = 13 --> c= (13-5) / 4 --> c=2 d'où ( p + (g + 2c + 2p)) x c = ( 5 + 19 ) x 2 = 24 x 2 = 48 Ceci dit, il est possible que le garçon ait bouffé un cornet... ou 2.
-
Euh, 30 ? Rectification, 48 ?
-
Voilà une bonne question ! Les véhicules suspendus (voitures..etc) indiquent des hauteurs pour la position neutre à vide, Là, en toute rigueur, une roue sans pilote est en butée haute... mais rien n’empêche de comprimer la roue et de bloquer la suspension... Edit : je ne résiste pas : mais comment fais-tu pour rentrer quoi que ce soit sous les sièges rer, malgré tous les tuyaux qu'ils ont mis dessous
-
Cela répond aussi à la question : Peut-on grimper "brutalement" un trottoir de 12 cm à angle vif ?? La réponse est non, si vous ne voulez pas ruiner votre jante. L'amortissement aide mais ne fait pas de miracle, il faudra accompagner le mouvement pour que le poids du pilote devienne nul, ou même négatif grâce à un saut. La forme ergonomique de la coque au niveau des malléoles peut aider au maintien des semelles en place. Néanmoins les trotts ont besoin de suspension très compactes, plus ou moins bien amorties. KS nous démontre qu'une roue peut utiliser un amortisseur de vtt, a priori une trott ne pourrait pas. Juste pour l'anecdote, il y a une seule trott qui a vraiment retenu mon attention (elle n'a aucun succès) c'est la Mercane MX60 qui a des suspension pneumatiques av et ar : Cela démontre qu'il est possible de développer des éléments très spécifiques, en petite quantité, même si les performances sont moindres.

-
Juste pour info, j'avais peur que cette animation soit pénible, eh bien non, il suffit de fixer le châssis, mettre une contrainte de type pignon-crémaillère entre sol et pneu, et mettre un moteur linéaire sur le sol, c'est tout. Je découvre Solidworks (je connais mieux Catia V5), mais là il faut admettre que c'est un soft sympathique.
-
Piou, ça c'est du service rapide... Merci Sylvain.
-
OK, yaka. Ah zut, je viens de voir qu'elle est en marche arrière :
-
@sbouju : fluidité + auto-reverse, c'est beaucoup mieux, merci. La vidéo n'est vraiment pas mon truc.
-
@papaCoursac : tu as raison d'évoquer l'équilibre en tangage, surtout que la coque évidée à l'arrière ne va pas aider... Il est possible qu'une roue qui largue son pilote devienne dangereuse en accélérant... J'en connais un qui va bientôt parler de leash...
-
Rappelons que ce ne sont QUE des hypothèses :