
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Oui, le style organico-tubulaire des motos a encore beaucoup d'adeptes, mais il s'applique mal aux e-roues qui ont toujours été "habillées"... Par nature, une roue se doit d'être compacte, c'est un critère de base. Là, cette surabondance de mécanique est mal venue, J'aime la moto, mais je pense qu'il ne faut pas mélanger les genres. En clair, tout ce qui est en jaune devrait disparaître, avec la suspension pneumatique dans les tubes. Et bien entendu une coque externe moins parcimonieuse (cachez ces tripes que je ne saurais voir)...

-
Sur le forum anglais, ils comparent cette roue à un bidet...
-
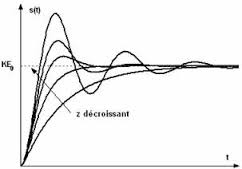
Il a inhibé les messages vocaux, il faut admettre que le "please decelerate" est assez lourdingue. Il est clair que ce genre de suspension peut se régler au quart de poil. Là, on est proche de l'amortissement critique, idéal, c'est à dire : proche de la 4ième courbe, alors que IM m'a semblé plutôt comme la 1ière, c'est à dire bien suspendue mais peu amortie... Juste des impressions. Edit : mais peut-être n'y a-t-il pas de vocal dans cette roue... Mmmhh ? En tout cas, elle fait un sale bruit lors des impacts, il n'empêche, attaquer un trottoir à angle vif est plutôt méchant, il faut un pneu bien gonflé.
-
C'est bon, Kuji, on t'a reconnu à tes chaussures :

-
La roue n'est qu'un début, bientôt l’exosquelette...
-
Eh bien voilà, on y vient... Bon, je ne me moque pas, la conception de cette appli est superbe. Du coup, le % de la trame bt ne sert pas, seule la tension (fortement filtrée) est prise en compte. Me goure-je ?.
-
Ben, j'admets être un peu du même avis. Bel exercice de style, probablement très efficace sur le plan fonctionnel, mais un peu trop Mad Max. C'est le même problème qu'en VTT : les bouteilles pneumatiques font entre 160 et 200 mm de long et seulement 40 à 55 mm de débattement. Il faut donc de la mécanique avec basculeurs et/ou biellettes... Et ici le problème est compliqué parce que l'effort de compression doit impérativement être appliqué dans l'axe de la roue pour éviter des réactions de pendule. Ben non, je ne suis pas séduit, l'utilisation d'amortisseurs existants (dont certains très performants) donne un résultat trop bâtard. Il faut passer à un système spécifique totalement dédié à la roue. Par exemple, les glissières sont belles, il faut incorporer l'amortissement dedans à la manière des tiges de selles ou des fourches. Honnêtement, on ne connais pas le détail de la mécanique InMotion, il est possible qu'il soit moins performant (?) mais il est beaucoup mieux intégré et ça va faire toute la différence...
-
Tout dépend de ta taille. Fais l'expérience : déplie un mètre ruban entre ton point fermé et le sol. Pour moi (1,76m), 80 cm c'est confortable. La V11 est haute et totalement dépliée à vide, elle fait 67,5 cm, il suffit que le mini-manche en biais ajoute 13 cm, ce qui est à priori le cas. Donc selon moi tout va bien et il est inutile de lui greffer un manche à balais... sauf si on est un géant.
-
Salut Guillaume. Je pense surtout que tu n'as pas fait trop d'effort pour investiguer dans les différents sujets déjà traités du forum. C'est pas grave, je vais faire court : @minch a déjà répondu, je complète un peu : En e-roue il y a 3 systèmes de frein pour maintenir les pédales repliées : -- Le système KS à ressort, ce ressort à lame est à l'intérieur de la butée basse qui sert aussi de poignée. KS abandonne ce système... -- Le système à friction en extrémité d'axe, nécessite une 3ième vis au milieu, IM met des tampons... -- Ou un aimant qui colle la pédale en position haute. Oui, il faut graisser ce ressort et la partie centrale de l'axe qui pivote dans le porte-pédale. En bout d'axe, Les pédales 8" ont 2 vis cuvette, les pédales 10" n'en ont qu'une mais c'est le même axe, à serrer fermement mais sans excès. Il n'est pas idiot de boucher le trou pour éviter qu'il ne se remplisse de patouille. A noter, en cas de rando boueuse, du sable peut s'accumuler sous le ressort en bloquant la pédale. Ne pas forcer mais démonter et nettoyer. Les ressorts s'achète séparément, mais là, tu vas chercher un peu ... . Le ressort lui-même a une bonne durée de vie, il n'a pas trop tendance à rouiller. Mais quelques utilisateurs ont réussi à le casser, probablement en forçant à coups de pompe.
-
Sur le plan techno, cette partie supérieure mobile ( qu'on peut continuer à appeler selle sans dérision ) est extrêmement évidée. Elle doit résister aux écarts de pression sur les pédales , elle supporte la poignée... Je pense qu'elle incorpore une carcasse métallique ce qui explique partiellement le surpoids constaté. Cette roue a une grosse personnalité, son esthétique n'est pas trop choquante, elle donne envie de monter sur une InMotion (pour la première fois ? ) ne fusse que pour l'essayer. Joli travail, encore bravo. Pour moi, il y a un détail bizarre qui m'accroche l’œil : les hachures verticales au dessus des phares, style Dark Vador ou pare-bœuf de loco. Est-ce fonctionnel (passage d'air) ou simplement esthétique ? Edit : je viens de voir que dessus il y a un bouton on-off et un bargraph, c'est très bien, C'est donc probablement un volume clos, et cela donne envie d'installer un petit tableau de bord, avec la tension et la vitesse, ce serait aussi une première en e-roue, ça manque terriblement par rapport à une trottinette...
-
Selon le forum anglais, le siège sera celui-ci :

-
J'ai changé un pneu récemment , j'ai pesé la roue équipée : Moteur KS18S-1500W + pneu Kenda 18x2,5 : 10kg (sans les supports pédale) Les 1680 Wh de batterie pèsent 6,6 kg Au total, le KS18S pèse 23 kg Ça existe depuis presque 10 ans, la roue 2 axes Honda : https://youtu.be/xRc-yVRaU3o
-
@Justin38 : vidéo intéressante. Attention, ce n'est pas le même escalier que la première vidéo, celui-ci est plus étroit (2x10 carreaux de large au lieu de 2x15 ou 16), le premier était couvert celui-là ne l'est pas mais surtout le premier était plus raide alors que pour celui-ci la hauteur de marche fait un presque 4 fois l'emmarchement, c'est à dire entre 15 et 20°. Un système coulissant, celui-ci descend très bas ce qui n'est pas le cas du modèle définitif qui donne accès à la valve. L'efficacité est sympa, bien sûr les intrépides peuvent s'en passer, mais pour le 3ième age c'est tout bon... @papaCoursac : tu as raison, la puissance électrique maxi est délivrée effectivement à la frontière entre les deux zones, là où U et I sont tous les deux max. C'est un peu comme pour les chargeurs qui donnent P max au passage de la régulation de courant à la régulation de tension. C'est quand même couillon que ce taux de modulation ne soit pas émis dans la trame bluetooth...

-
J'imagine que l'appli pense que tu as une roue 67 V alors que tu as une roue 84 V. Il faut renseigner l'IA , remplir les big data comme disent certains...
-
moi j'ai toujours regretté l'absence d'allume-cigare...
-
En bref, caractéristique d'un brushless : Pour avoir du couple dans un moteur il faut du courant dans le stator pour interagir avec les aimants. Un brushless a une résistance interne extrêmement faible, bien inférieure à 1 Ohm, on lui applique donc un courant pulsé pour contrôler l'amplitude. La caractéristique globale comporte deux zones ( j'ai pris des valeurs arbitraires ), c'est la courbe du maximum disponible : Dans la zone 1 on régule le courant, et cela crée un couple principalement lié au nombre de spires des électro-aimants, (N.I). Au delà d'une certaine vitesse, dans la zone 2, la fcem (la tension contre électro-motrice) est telle que même une modulation de largeur de 100% ne peut plus maintenir le courant. Bien sûr, cette fcem dépend aussi du nombre de spires... C'est ça la clé principale : le nombre de spires de chaque bobinage. Si on l'augmente, on améliore le couple de démarrage mais on diminue la vitesse maxi. Seul Gotway a proposé trois versions de moteur sur la MS2. Si on augmente la tension (84V --> 100V) on repousse la pente 2 vers la droite, mais le couple au démarrage est inchangé si le courant reste le même, (le hachage devra être un peu plus fin) En orange la géniale alarme 80% d'une Gotway, qui réagit uniquement sur le taux de charge, pas sur la vitesse.

-
<hs> encore un traumatisé orthographique !. Moi c'est le mot balade que j'ai osé écrire avec 2 L, je me suis fait recadrer, maintenant je fais vachement gaffe. </hs>
-
Là, l'évaluation est difficile. Si on pense (?) que la hauteur de marche est égale à 2 girons, on a arc tangente 0,5 = 26,5°. C'est peut-être un peu plus mais ça m'étonnerait que ça dépasse 30° , c'est à dire une pente 100 x tangente 30 = 57 %
-
Impeccable @little_nemo , bien sûr les aigrettes en biais sont redoutable. ( oui, tu as raison, j'ai vérifié, ce sont bien les hiboux qui ont les "oreilles", pas les chouettes) Anycubic a une bonne réputation, ton expérience le confirme. Ce qui est remarquable c'est l'absence de petits fils entre les deux pièces. Parfait. Je suis intrigué, ton skirt autour des pièces n'a pas une largeur constante, le plastique a bavé au départ ? C'est une bonne habitude de faire ça, cela nettoie la buse et permet de contrôler l'épaisseur de la première couche.
-
Oui, a priori le .stl est une valeur sûre. Je trouve dommage que windows n'ait pas un viewer de stl incorporé, un peu comme le vieux viewer de pdf 3D incorporé dans Acrobat, bizarrement très peu utilisé et je crois même que Acrobat-3D n'existe plus. Ceci dit, des soft de visionnage gratuit existent, ou bien on peut importer le fichier dans sa cao préférée. @little_nemo : merci pour tes infos. En fait, je ne cherche pas une promo en or, et comme je voudrais une imprimante format mini 35 cm au cube, pour de l'abs , je suis près à mettre ~500€ , mais pour un truc qui marche tout de suite (après un montage simple). La grosse mode est d'upgrader sa machine en imprimant des pièces, en changeant divers trucs, je préférerais limiter ce genre de choses, sauf bien sûr le meuble-caisson qu'il faut faire sur mesure. Donc les gadgets style bl touch , détecteur de fin de fil , reprise après coupure d'alim , contrôle distant par ordi... déjà opérationnels.
-
Ouais, tout le monde aimerait bien la voir redescendre... par les escaliers.
-
Waaah, trop facile Il n'empêche, on trouve des corps morts ( .step ou autres) , ils sont difficile à modifier, l'idéal est quand même d'avoir les fichiers originaux, surtout dans les assemblages. Mais là, il y a une foultitude de formats... et certains hésitent à les diffuser parce que... il y a le No de licence inscrit dedans . Tu as probablement raison si tu n'as pas de problème de rétractation, même le Y en prend un coup sur une Prusa like. Les modes vibratoires sont très pénibles, les pas-à-pas excitent les résonances (peau de saumon), sans parler des over-shoots qui créent des ghosts..etc. Les smoothers à diode améliorent tout ça, mais de nouveaux drivers sont moins violents et plus silencieux sont proposés... à voir... bientôt... C'est la raison principale pour laquelle j'abandonne l'idée d'une Delta, ou même d'une core XY car les mouvements composites sont complexes et les résonances dépendent de la position de la buse... Bon, j'ai aussi l'impression de me faire trop de nœuds au cerveau.
-
C'est plus facile pour un constructeur d'utiliser des éléments disponibles, mais là, il n'y a pas grand chose : -- suspension (pneumatique ?) réglable et amortie avec "grand" débattement : perso, je n'en connais pas, même ceux des vtt ou des dirt bikes sont trop gros et inadaptés. En trott' je ne connais que la Mercane MX60 , petit débattement car destinés à des bras oscillants... -- pneumatiques : inutile d'évoquer les 20", ils n'y en a pas, les 20" pour cycles sont trop grands. Ou alors faire comme 9bot, choisir un pneu de petit scooter mais ils sont très larges... J'imagine qu'en Chine, consulter des sous-traitants ne doit pas passer inaperçu vu qu'ils ne savent pas trop ce qu'est le confidentiel industrie...
-
Tu es passé au direct drive ou tu as laissé le Bowden ? Voilà un cas où deux buses seraient utiles, pour mixer deux types de fil...
-
Premier problème : numériser la coque de la roue. Comme il est rare de disposer de moyen pour scanner un objet de grande taille, mesurer les surfaces galbées pose problème. Coup de pot, la nouvelle ks18 a une forme lenticulaire, c'est une surface de révolution et il suffit d'esquisser le rayon. Je préconise d'utiliser un copieur de profil, par exemple : https://www.castorama.fr/copieur-de-profil-mac-allister-250-mm/5052931363360_CAFR.prd On peut reporter ce profil sur un papier millimétré, pour déterminer les coordonnées de 6 ou 8 points le long de la courbe. Il faut augmenter la densité dans les zones de rayons faibles. Dans la cao, on trace ces points sur une esquisse 2D pour faire passer une courbe de Bezier. On tourne la pièce et c'est bon. Pour avoir une pièce creuse (un bouclier) avec l'épaisseur adéquate et constante, soit on utilise la fonction décalage au niveau de l'esquisse, soit la fonction coque au niveau du volume. C'est juste une idée, mais j'ai déjà fait ça, avec un travail soigné la tolérance est d'environ 1/2 millimètre.



