Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
 Bah, ça les aidera à digérer les quelques tonnes de plomb qu'ils ont reçu quand Notre Dame a cramé.
Bah, ça les aidera à digérer les quelques tonnes de plomb qu'ils ont reçu quand Notre Dame a cramé. -
"La maire de Paris propose au préfet de Police de signer ensemble un arrêté. Les trottinettes électriques devront stationner sur les places de stationnement situées sur la chaussée et déjà utilisées par les voitures et les deux-roues motorisés." Exiger que les trotts soient stationnées sur des places pour voitures, c'est vraiment complètement con. Et il faudra aussi alimenter les parcmètres ?... Non, il faut garer les trotts sur les trottoirs et définir clairement sous quelles conditions. Légalement, le trottoir minimum doit faire 1,40 mètre libre de tout obstacle, et bien sûr nettement plus dans les rues très passantes. Une trott est beaucoup moins encombrante que les poubelles (certaines sont monstrueuses), pourtant les poubelles ne sont pas conduites à la fourrière, les propriétaires ne sont pas verbalisés (à ma connaissance). A mon avis, le problème principal est que les trotts en location sont instables sur leur béquille latérale, il faut une double béquille ou béquille centrale, blocage de la roue avant quand on tourne le guidon de 110°, les batteries obligatoirement sous le deck, autre... Ceci afin d'éviter qu'elles soient appuyées n'importe où, accrochées à des feux rouges, allongées par terre... Mais, bien sûr, interdiction de garer sa trott au fond de la Seine :
-
Ben non, c'est une originale de 1971, couleur vieil or, 2 ans + tard elle s'appelait 750 Four avec une ligne plus fine. Voilà, voilà, sujet clos.
-
Mini Z10 et MSX - Fingerwheel - porte clés
Techos78 a répondu à un(e) sujet de soy dans Discussions générales
Superbe ! Moi ça me convient tout à fait, mais, vu la tendance parano de ce forum, on va te dire qu'il manque casque intégral, protèges poignets, coudes, genoux, et peut-être même une coquille... Ceci dit, on n'a pas tous des muscles saillants, des abdom's tablette de chocolat. Pour la calvitie, on y pense, on y pense... -
J'ai eu professionnellement plusieurs fois l'occasion de faire des mesures (sérieuses) de puissance sur des moteurs mono ou polyphasés. Je vous donne le truc. Pour une e-roue, il faut d'abord savoir clairement ce qu'on veut. Deux cas : (qui nécessitent un oscilloscope haut de gamme) -- électronique+moteur : C'est le plus simple. Il faut mesurer la tension et le courant délivrés par la batterie, et, selon la précision désirée, on filtre les ondulations et on fait le produit U.I (précision ~5%). Si on veut une précision d'environ 1% il faut faire le produit U.I de chaque échantillon (résolution 14 bit souhaitable) puis intégrer sur un nombre entier d'ondulations. Je rappelle qu'il ne faut pas confondre valeur moyenne et valeur efficace à cause de la nature quadratique des puissances. (le ratio n'est pas connu car les ondulations ne sont pas franchement sinusoïdales). - moteur seul. Le moteur est une boîte noire, on ne sait pas si les 3 phases sont en étoile ou en triangle. C'est dommage car en mettant le point commun de l'étoile à la masse, cela simplifierait les mesures. Bref. Le moteur est excité à l'aide d'un découpage sec par mosfets en demi-ponts, cela nécessite des précautions métrologiques. L'idéal est d'installer la manipe dans une cage de Faraday, non pas pour la cage elle-même, mais pour avoir une paillasse plein cuivre qui donne une référence de tension sérieuse. On mesure la tension entre deux phases à l'aide d'une sonde différentielle rapide (la fonction A-B d'un scope ne suffit pas), on mesure le courant dans cette branche avec un mini-shunt à l'aide d'une autre sonde différentielle. (il est peut-être possible d'utiliser une pince ampèremétrique ou une sonde emi). On fait le produit de chaque paires U.I (iso-datés), on intègre sur un nombre entier de période (si possible sur un tour de roue) et on multiplie par 3. D'expérience, la précision avoisine 2%. Pourquoi j'ai dit tout ça ? Simplement pour montrer qu'une mesure sérieuse de puissance est hors de porté de nos carte mère, les petits can (convertisseurs analogiques-numériques) des µcontrôleurs (généralement Cortex) font ce qu'ils peuvent et les facteurs d'échelle sont codés avec les pieds. Si la précision atteint 50%, c'est qu'on a beaucoup de pot... C'est purement indicatif, inutile de s'attarder là-dessus.
-
Mini Z10 et MSX - Fingerwheel - porte clés
Techos78 a répondu à un(e) sujet de soy dans Discussions générales
C'est chouette, tu t'amuses bien @soy . J'ai aussi dessiné quelques protos en cao, j'ai eu un peu de mal avec le pneu, en atelier volumique sous Catia V5, c'était quasi-impossible, et je connaissais mal l'atelier surfacique. Mais depuis que je suis passé sous SolidWorks, tout devient trivial, un simple enlèvement de matière à répétition circulaire avec projection sur une surface presque torique définie par des courbes de Bézier, fastoche... enfin presque. -
L'utilité du "bris de glace" est discutable, personne n'aura l'idée de mettre un pare-brise tête de fourche sur une trott (ou une roue) 30 €/an est raisonnable, les dégâts à l'engin sont à la charge du pilote, ce qui me semble logique, quand on casse son jouet et qu'on est responsable, eh bien on assume sans chercher à faire payer les autres... et au bout de 15 ans on est gagnant.
-
Euh, @King Size , tu n'est pas un peu suicidaire (toi et ton infâme diésel) ? Assurément fopafersa ! ! En descente, ce ne sont pas les incisives qui tu plantes dans le bitume, mais c'est le coccyx (l'autre extrémité du tube digestif, ~7 mètres). La pauvre carte mère reçoit de l'énergie dont elle ne sait que faire, la tension grimpe à des valeurs indécentes, les mosfets sont en réel danger...
-
Ouille, cette fente est inquiétante... Je n'ai pas eu ça, moi c'était uniquement les puits de vis écrasés, brisés, suite à un cumul de soucis : serrage excessif, chutes, affaissement d'un support pédale desserré. Cette fente s'explique peut-être par un effort de vrillage de coque lors d'une chute ? ... Car la coque est très encastrée dans les supports. Je remarque que la coque comporte deux nervures au fond des cavités, elles n'existent pas sur les coques ancien modèle. (je découvre car je n'ai jamais ouvert la ks18s). Dans ces cavités de la 18a, j'y ai mis des connecteurs moteur et sondes hall, ce qui permet de ne pas tout démonter pour sortir la roue. (les caches latéraux sont fractionnés, la partie basse est indépendante). : Sur cette photo il n'y a pas encore les boulons poeliers mais une plaque d'appui en alu sous les tête de vis, mais les colles que j'ai essayées ne tiennent pas (époxy, néoprène...) Avant de mettre ces boulons, j'avais envisagé de mettre 4 vis sur les côtés. Percer/tarauder les supports alu est facile, (M5 ça suffit), mais un perçage latéral en zone encastrée de coque est plus ennuyeux. Il y a jsaipuki qui a découpé/recollé sa coque en faisant fondre le plastique dans de l'acétone, c'est probablement une bonne solution. Je pratiquais le trichlorétylène avant que celui-ci devienne introuvable (ce qui me fait vraiment chier !).

-
Faucon E9 un scooter electrique 125 rapide
Techos78 a répondu à un(e) sujet de helyxir dans Motos & scooters électriques
Vu, merci @helyxir -
Les motos roadster et GT dépassent 200, les sportives 300. On ne peut pas dire qu'un nvei atteint le domaine de vitesse (max) d'une moto. Pour moi, la hiérarchie est claire. Mais je suis d'accord, je me sentirais plus en confiance sur un cyclo affuté, les petites roulettes, ça craint. Exemple, la brouette chinoise :

-
Tu es trop inquiet @papaCoursac . Oui, nos engins (roues et trotts) ont une tenue de route assez approximative, et il est déloyal de les comparer a une moto. J'ai participé à plusieurs randos mixtes, les roues sont plus à l'aise sur les chemins, les trotts imbattables sur route. Je pense que les roues sont plus ludiques, les trotts plus sérieuses... Mais cela reste des mini-engins taillés pour le loisir, et beaucoup moins pour des solutions pérennes intensives (intempéries, fatigue...). Je salue ceux qui les utilisent pour aller au boulot... Chapeau, mais le risque est réel.
-
Faucon E9 un scooter electrique 125 rapide
Techos78 a répondu à un(e) sujet de helyxir dans Motos & scooters électriques
C'est en supplément d'un contrat voiture, ou bien le scooter seul ?. Vol-incendie ? Multi-conducteur ? Merci... -
Bah, une Ferrari F8 Tributo peut rouler à 340, mais ne dépassera pas (?) 130 sur autoroute. Mais il faut un pilote ... avec des nerfs solides. . 11 pouces, c'est quand même pas mal. Ce qui m'inquiète plus, (moi je me contente d'une Honda CB750) c'est la géométrie globale (surtout le train avant avec très peu de chasse). Je doute qu'on puisse bloquer la gâchette et lâcher le guidon, ce qui serait quand même la moindre des choses en terme de stabilité. (je dis ça mais je n'y connais rien en trott).
-
Mmmhh, cette maxime ne marche pas, mieux vaut utiliser celle de Coluche : Oui, la traînée est liée au carré de la vitesse, mais comme c'est la puissance résistante qui nous intéresse, de la forme P = R.V (R est la force résistante due à la trainée) , on se retrouve avec une puissance consommée liée au cube de la vitesse. @volavoile , help, si tu regardes toujours ce fofo, explique nous ça mieux que je ne saurais le faire...
-
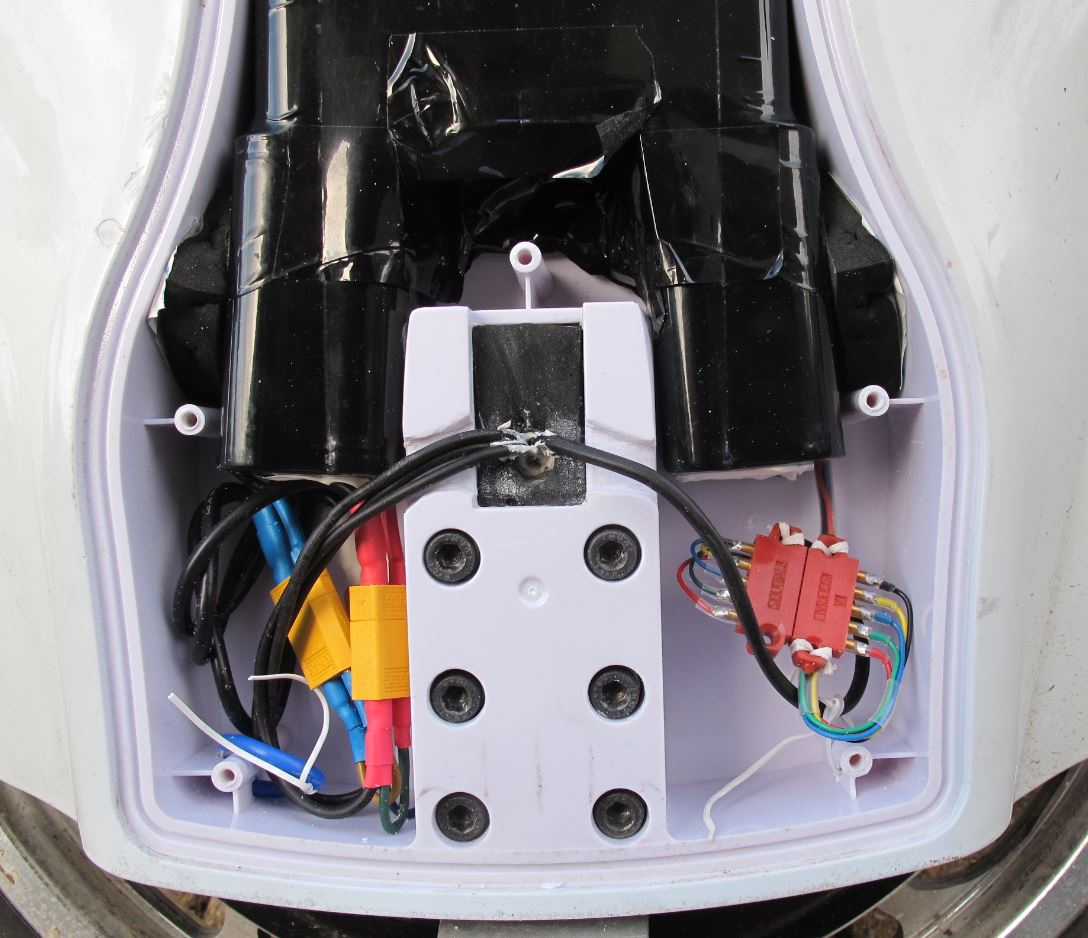
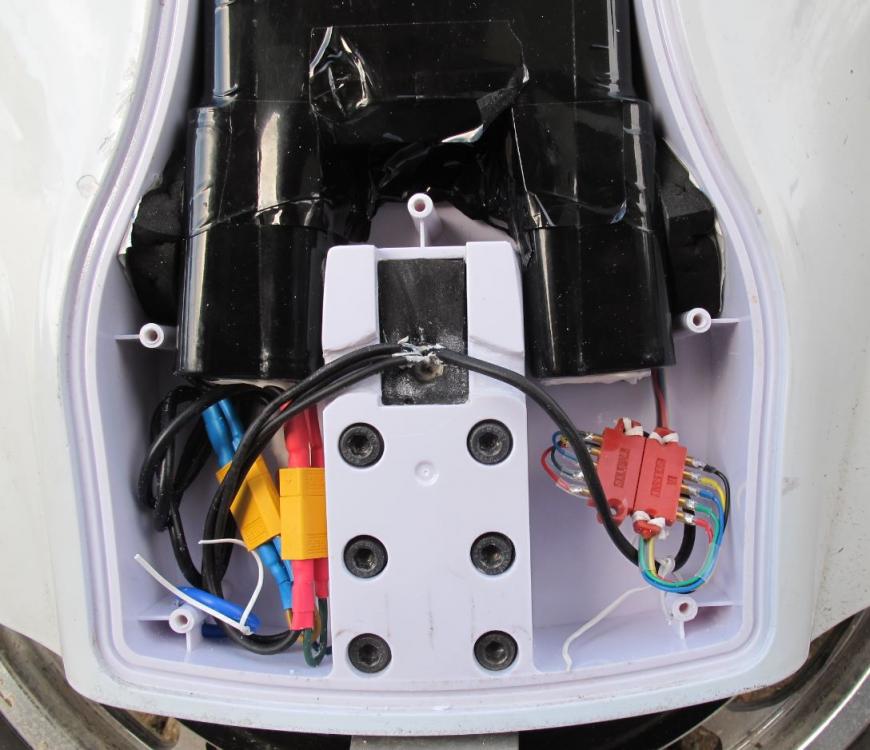
Il y a une dizaine d'essais sur Youtube de la SUPER SOCO TC MAX, elle arrive bientôt en Europe... Une vidéo au hasard : Une petite machine à un prix attractif, avec une esthétique qui ne met pas la honte, je pense que certains se laisseront séduire... Bien sûr, il est possible d'ajouter un porte bagage, un top case, une selle améliorée ... exemple :
-
C'est un problème qui a été analysé très finement ... par la sncf. Rouler à vitesse constante, ou rouler à puissance constante. De mémoire, il y a plus de 20 ans, le meilleur compromis économique est entre les deux. J'imagine que cela a dû être détaillé sur la toile ... Avec le rendement du moteur/générateur, le rendement electro-chimique, les pertes Joule + carte mère, je serais surpris que cela dépasse 85%. Mais je n'ai jamais vu de chiffre sérieux, dommage... Je ne le pense pas, la réactivité du lithium augmente avec la température, il faut se rappeler des scandaleuses batteries Bolloré stabilisées à 80°C...
-
Carte mère probablement grillée mais attention, il faut que la roue soit bien à l'arrêt (en fait, en veille), et que le pneu tourne librement (i.e. comme d'habitude). Si tu sens une résistance, c'est qu'un ou plusieurs mosfets laisse(nt) passer du courant ce qui vide les batteries, et cela les tuer car c'est la carte mère elle-même qui gère la coupure de tension basse... En effet, contrairement aux pack génériques, les bms des roues n'ont pas de mosfets de limitation de courant + coupure "over-discharge protection" (généralement 2,55 V par cellule).
-
Si la roue se "relève" pour une rotation à droite ET à gauche, ce n'est pas un problème de verticalité lors de la calibration. Car si on calibre en biais, on a un piqué dans un sens de rotation et un cabré dans l'autre. (fugitif, genre tilt back, tiltfront). C'est autre chose... il suffit de poser la question au sav Ninebot .
-
Oui, c'est le scan de l'appli qui doit retrouver la roue, d'autant plus que les KS ont deux liaisons bluetooth (système et audio). Sur les "vieilles" roues, on pouvait couper l'audio, j'ai l'impression que ce n'est plus possible...
-
<hs> Très bien cette table de travail B&D, je vais me l'acheter pour profiter des avantages carte BricoMarché...(-10%) </hs> Je suis ravi de voir un gars soigneux qui prend soin de sa vieille ks18, assurément une roue sympathique. ( Je veux être enterré avec ).
-
Loi Mobilité - le 14 septembre (enfin une clarification de l'utilisation de l'espace public)
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
ok .. malheureusement beaucoup de gens vont croire que la trottinette doit etre recyclé au bout de 3 mois,comme je l ai compris Ce n'est pas parce qu'on a une espérance de vie de 79,5 ans que l'on reçoit une convocation pour se faire incinérer... ouf ! (un film de SF bien connu : l'age de cristal...) -
Loi Mobilité - le 14 septembre (enfin une clarification de l'utilisation de l'espace public)
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
Il est possible (?) que cette statistique inclue aussi le vol, fatalement colossal, sans parler de l'immersion au fond de la Seine... -
Oui, ces trous de vis sont un point de faiblesse. La tête de vis appuie sur très peu de plastique, et il y a en plus des rondelles frein éventail qui n'arrangent rien, car elles machouillent le lamage. Il faut donc les serrer très modérément, avec un peu de Loctite freinfilet faible. Et en cas de chute, les lamages s'arrachent... Les vis sont de très classiques M6, qu'on trouve (presque) partout, j'ai adapté la longueur par sciage/meulage. Cependant, pour refermer correctement les capots latéraux, il faut creuser à l'intérieur de ces capots (à la Dremel) à l'emplacement des têtes de vis. Les vis de ton lien conviennent, j'ai l'impression que la tête fendue en croix est un peu moins épaisse que celle de la photo, mais il faudra quand même creuser un peu. Mais le résultat est impeccable. Euh, la coque frotte contre le carter moteur, non ? C'est d'ailleurs ce qui arrive quand la fixation des supports pédales est desserrée, cela peut aussi contribuer à arracher les fixations. Voilà la trace de la coque sur le carter moteur : Diable, déjà !. Je pense pouvoir pousser les Kenda à 5 ou 6 000 km...


-
Les deux coques sont quasi identiques, les écarts que je vois sont : -- il y a deux vis supplémentaires presque au centre de la poignée de la 18s, la 18a ne les a pas, mais je n'ai jamais constaté un écartement entre les 2 demi-coques. -- la carte mère de la 18s est ventilée, le capot de la 18a est plat sans évents. Mais les 18a de seconde génération sont aussi ventilées. -- les capots latéraux des 18a de 680 et 840 Wh ne sont pas percés (sous les pads supérieurs) car il n'y a que les 2 batteries en bas. La 3ième batterie en haut nécessite de percer les deux carters, d'ailleurs quand j'ai ajouté une batterie générique très grosse (avec raidisseurs internes), cela passait vraiment juste : La batterie KS n'a que la chaussette thermorétractable, elle passe plus facilement. La photo de droite montre aussi la poignée avec un seul trou de vis (le même de l'autre côté). Ma "vieille" 18a, achetée d'occasion, avait aussi des fixations de coque arrachées au niveau des pédales, j'ai remplacé les vis alen cylindriques d6 par des vis à tête très large (boulon poêler inox), attention à la longueur des deux vis du haut qui peuvent interférer avec les vis des brides de fixation sur l'axe moteur. La 18s n'a plus le on/off bluetooth audio, celui-ci est toujours en route. mais le petit tableau de bord avec les leds de batterie a la même dimension. Donc, en rando, n'importe qui peut t'envoyer des zimzimboumboum sur ta roue, ce qui n'est pas forcément rigolo. Mais peut-être que les nouvelles applis permettent de mettre un mot de passe BT... En résumé, les deux coques 18a et 18s sont compatibles, mais pour quelqu'un qui découvre le truc, c'est ~1 journée de boulot. (surtout bien faire le joint à l'intérieur du passage de roue).