Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
C'est bidon, personne n'a envie de faire l'effort de recharger une batterie, que ce soit en roulant ou sur un home-trainer chez soi. On a des centrales nucléaires pour ça .
-
J'ai du mal à comprendre. A l'opposé des beaux mosfets (mal soudés) je vois 4 connecteurs bipolaires blancs qui sont en toute rigueur (?) réunis à la sortie de chaque batterie. La charge des batteries ne passe donc pas par la carte mère, elle fait partie du faisceau et n'a donc aucune raison d'être livré avec cette cm. Je me trompe peut-être, la structure du câblage nécessite des épissures, (on en voit au dessus de la cm), tout cela est fretté par dessus la carte ce qui rend l'ensemble assez confus. Il faut être clair, la carte mère est une chose, le faisceau (et raccords divers) une autre, de même que les vis de fixation, les frettes, etc. A ma connaissance, il n'y a que la ks18L qui est reliée au port de charge et est réunie à chaque batterie par 3 fils. Presque toujours, la charge est une fonction qui n'a pas de rapport avec la carte mère, tirer à boulet rouge sur un revendeur me semble peu pertinent. "Friends, these three red plugs are batteries and charging. The motherboard is not equipped with this plug." ... que dire de plus ? ? ?
-

Super SOCO CU-X, un équivalent 50... débridable, à 2690€
Techos78 a répondu à un(e) sujet de helyxir dans Motos & scooters électriques
Bon, je vais donner la clé pour comprendre ma réponse. Depuis Fantasia de Walt Disney, Paul Dukas est connu essentiellement pour l'Apprenti Sorcier, et c'est ce que nous sommes perchés sur une roue avec une maîtrise partielle des mécanismes en jeu et des nombreux aléas. Pour Wagner je pense à la Chevauchée des Walkyries qui représente bien le troupeau de trotts qui déboulent sur les trottoirs. -
Super SOCO CU-X, un équivalent 50... débridable, à 2690€
Techos78 a répondu à un(e) sujet de helyxir dans Motos & scooters électriques
Bah, mon avis ne présenterait pas beaucoup d'intérêt, et nécessiterait une réponse longue (et hors sujet). Pourquoi on peut préférer Paul Dukas à Richard Wagner ? Mystère... -
Le plus, le moins, le fil rouge, le fil noir...
Techos78 a répondu à un(e) sujet de sbouju dans Bob la Bricole
Impec, ça roule. Pour info, c'est quoi ce "charge doctor" qui n'est visiblement pas passé dans les mains de Hobby16 ? Il fait aussi les coupures programmables ? -
Le plus, le moins, le fil rouge, le fil noir...
Techos78 a répondu à un(e) sujet de sbouju dans Bob la Bricole
Ah ouais, je comprends mieux la raison de ce post sur les couleurs, il y a là un sac de nouilles qu'il faut démêler... A mon avis, la validation du câblage comporte deux étapes : d'abord la liaison chargeur -> charge-doctor avec la sortie CD non branchée. Si la polarité est bonne, le CD s'allume en indiquant 0 Ampère. Dans le cas inverse, le CD brûle. Quand c'est fait, on branche la liaison CD -> batterie en faisant confiance à la couleur des fils du CD et des fils des batteries. Il faut effectivement négliger les couleurs du raccord Amazon pré-câblé T-plug rouge, et cela peut effectivement conduire à relier du rouge et du noir... En clair, soit toutes les couleurs sont bonnes, soit il y a une double inversion et le départ (CD) et l'arrivée (entrée pack) sont identiques. Bon sang, s'il te plait, achète un multimètre, un truc à 15€ ça suffit . Mesurer une tension est facile, mesurer un courant un peu plus délicat. -
Le plus, le moins, le fil rouge, le fil noir...
Techos78 a répondu à un(e) sujet de sbouju dans Bob la Bricole
Ben non, rouge tout le long, noir tout le long, les fils doivent propager la couleur. Ce sont les récepteurs (les batteries donc) qui inversent la couleur entre entrée et sortie. C'est surtout en informatique qu'on se permet de croiser les fils dans certaines liaisons numériques bidirectionnelles (RS232, RS422, Ethernet...) pour faire correspondre les entrées/sorties. Pour les câble Ethernet, beaucoup de routeurs ou switches effectuent électroniquement le croisement, il est quand même plus prudent de pas trop compter là-dessus. Edit : halte au feu, j'hésite. Si il y a le moindre doute sur la couleur des fils des bretelles de raccordement pré-câblées de Amazon, il faut vérifier chaque numéro de broche connectée, et, quand on est sûr, eh bien on boit un café et on refait une vérification. Pour sécuriser le test, on peut inclure un fusible dans le circuit, au double du courant de sortie du chargeur. C'est nettement plus simple quand on a un voltmètre sous la main... -
Le plus, le moins, le fil rouge, le fil noir...
Techos78 a répondu à un(e) sujet de sbouju dans Bob la Bricole
J'ai l'impression que le sujet dérive un peu... On est conditionné dès l'enfance par des conventions, il est impossible d'y échapper. Serrer une vis, ouvrir un robinet, l'eau chaude à gauche, la pédale de frein au milieu ... Des habitudes pratiques, conventionnelles. Il y a quelquefois des raisons techniques qui, lorsque elles ne sont pas respectées, ont un impact (mal défini) sur l'esthétique. Je pense par exemple aux volets ou aux portails lorsque l'écharpe (la barre en travers) est montée à l'envers. En bois, elle doit travailler en compression, en métal elle doit travailler en tension. L'erreur est rare, mais elle me fait hérisser le poil... Mais pour compenser certaines conventions m'indiffèrent... fourchette à gauche ou à droite, je m'en tamponne royalement, d'ailleurs, c'est quoi ? En technique, les notions de normalité et de repos sont souvent liées. Un relais se dessine au repos, un interrupteur aussi avec le curseur si possible vers le bas. Les contacts peuvent être repérés NO, NC (normaly open, normaly closed). En fait, il est normal de ne rien faire, ça c'est une habitude qui me plait beaucoup... -
Le plus, le moins, le fil rouge, le fil noir...
Techos78 a répondu à un(e) sujet de sbouju dans Bob la Bricole
Oui, même si le mot tradition est un peu fort, je dirais plutôt bonne habitude... à un point tel que quand je branche les cordons de mon multimètre, je respecte les couleurs (même pour des mesures alternatives ). L'origine du rouge au + est ancienne, j'imagine qu'elle vient de la notion de "point chaud" qui génère le courant, alors que le retour de courant est le "point froid", la masse, la structure d'un ordinateur, d'un véhicule... (attention, pas tous). Il s'agit du sens conventionnel de l'électricité, le sens électronique est inverse. Il faut être conscient que produire et gérer des câbles de différentes couleurs est un réel effort industriel, mais le bénéfice d'un "lever de doute" vaut le prix, les erreurs de polarité ayant souvent des conséquences désastreuses. Notons que certains secteurs ne font pas cet effort : par exemple tous les fils ont la même couleur dans un câblage avion. Et comme l'a dit @.AleX. , il est préférable de mettre les pinoches femelles du côté de la source, par sécurité. Mais il y a des cas litigieux, comme par exemple le port de charge Gotway qui est aussi une source basse impédance, ce qui a provoqué un certain nombre de feux de Bengale quand on titille la roue avec un objet métallique... Il y a aussi les connexions hermaphrodites, là on fait ce qu'on veut. Une autre habitude : pour un interrupteur, mettre la position on en haut, off en bas. (bon, pour un va-et-vient c'est foutu...). Là, l'origine est plus claire, cela vient des gros interrupteurs (EDF...) qui doivent se couper si le manipulateur tombe victime d'un malaise. Edit : je ne résiste pas : si tous les fils étaient monochromes, il y a beaucoup de films d'action qui perdraient tout leur charme... -
-
Le support "officiel" est ce qu'il y a de mieux, sinon deux cales identiques sous les pédales... juste une suggestion.
-
Juste pour info : chez KS le numéro est donné par l'application, les premiers caractères donnent le modèle et il y a un caractère pour la quantité de batterie. @papaCoursac amuse toi bien avec ton nouveau joujou, Je regarde toujours tes commentaires avec intérêt... Vive les jeunes
-
Il faut que la roue soit parfaitement verticale latéralement (en roulis) quand on fait la calibration des pédales. Si on calibre en biais, il peut effectivement y avoir un tiltback/tiltfront fugitif. On peut tester en tenant la roue à la main, quand on fait un pivot manuel rapide (en cap), l'angle des pédales ne doit pas bouger, il doit conserver l'angle (en tangage) que l'on a imposé lors de la calibration.
-
Limite à 20 km/h pour les EDP ! Mobilisez vous !!
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
@Dridjo , tu m'impressionnes, tu as une patience de bénédictin... Bon, en substance, tu nous dis que le PV de 5ième classe à 1500€ n'est pas applicable aux e-roues car le débridage est impossible à démontrer. Si l'assureur ne veut pas payer, ça c'est un autre problème. L'assureur n'a pas de moyens de test, l'expert n'est pas assermenté et donc pas habilité à réclamer l'application d'un PV. Tu as raison d'évoquer les cyclos thermiques, il est bien évident qu'un gendarme ne peut pas vérifier le diamètre d'un gicleur de carbu au coin d'une rue... Mais un gicleur c'est concret, tangible, alors qu'une programmation de tiltback est très virtuelle, (trop ?) évolutive. Même l'application qui lit les seuls d'alarme bluetooth doit être certifiée, eh bien on n'en est pas encore là. -
Limite à 20 km/h pour les EDP ! Mobilisez vous !!
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
Ben non, artemisa ne peut pas contrôler une e-roue, le test d'un engin pendulaire est possible mais nécessite des moyens nettement plus imposants et sophistiqués... Comme il y a ~100 fois + de trott's que de roues, et que ces roues posent a priori moins de problèmes (médiatiques), j'imagine ne jamais voir ce genre d'outil dédié... A ma connaissance, seuls les russes ont essayé des roues dans une chambre de test, pour mesurer le couple et la vitesse, le système est énorme et il nécessite une fixation et une mise en charge adaptées au type de roue. Mais de là à en faire un outil certifié... -
Limite à 20 km/h pour les EDP ! Mobilisez vous !!
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
Une question simple : Comment fait un gendarme pour vérifier si une e-roue est débridée ?. Sachant qu'il est facile d'inhiber l'antenne du bluetooth (scotch alu...), il reste le contrôle physique : -- le gendarme essaye la roue (je ne suis pas sûr qu'il en ait le droit... ou le courage) -- ou bien il dispose d'un moyen de test (à rouleaux...) et là je suis sûr qu'on ne verra pas ce genre de chose (certifié et vérifié) avant plusieurs décennies. -
Loi Mobilité - le 14 septembre (enfin une clarification de l'utilisation de l'espace public)
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
Pour ce qui me concerne, les deux roues neuves que j'ai acheté (gyroroue-shop et Kingsong-Europe) avaient le tiltback à 25 km/h, le code de débridage ne m'a pas été fourni c'est donc moi seul qui ai pris l'initiative de modifier cela. Je peux donc témoigner que pour moi 100% des roues sont bridées à 25 km/h. Dans les deux cas, les cartons avaient été ouverts, puis refermés, avec les pneus à une pression correcte, ce qui laisse supposer qu'un travail de contrôle ou de préparation avait été effectué. (vérifier le numéro de série nécessite de mettre la roue en route...). Evidemment, si on n'achète pas en boutique, on peut même recevoir une roue "bridée" à 0 km/h, ce qui est fréquent avec Ninebot dont les roues ne marchent pas à la livraison... -
Loi Mobilité - le 14 septembre (enfin une clarification de l'utilisation de l'espace public)
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
L'impulsion initiale ne compte pas. Ce n'est pas parce qu'une voiture a un démarreur de 1 cheval qui permet de parcourir 50 mètres qu'elle entre dans la catégorie des hybrides... -
Loi Mobilité - le 14 septembre (enfin une clarification de l'utilisation de l'espace public)
Techos78 a répondu à un(e) sujet de Dridjo dans Les lois et assurances
Les e-skates obtiennent un score étonnant mais la catégorie est large. Petites planches jouet, planches +/- longues 4 (grandes) roues, planche mono-roue ... Cela mélange donc des engins traditionnels et pendulaires, alors que les problématiques sont différentes. En balade (~10 000 km), je n'ai croisé que 2 skates mono-roue.. Et j'ai croisé des fauteuils roulants d'handicapés et même une poussette biplace électrique. Et je ne parle pas de tondeuses auto-tractées -
L'engin. En accélération, la fcem se soustrait à la tension batterie, c'est pour cela qu'on fait des roues 100 Volts pour aller vite. En décélération, la fcem s'additionne à la tension batterie, le freinage est donc plus efficace. Ce n'est pas la fcem qui change de signe (elle est simplement proportionnelle à la vitesse de rotation), c'est la tension batterie qui est appliquée cycliquement au moteur, la variation de phase permet le contrôle du couple positif ou négatif. Cette fcem est toujours présente (sauf à vitesse 0), c'est en quelque sorte une "batterie virtuelle" qui se place en série avec la batterie de la roue. Le pilote. Le plus souvent, on accepte plus volontiers de se pencher en avant qu'en arrière, surtout que les inclinaisons extrêmes sont dangereuses. Il est bien difficile d'imaginer un pilote parfaitement symétrique... Edit : on parle de force électro-motrice ou force contre électro-motrice, mais il faut avoir conscience que ce n'est pas une force mais une tension. Les physiciens aiment bien plaisanter...
-
Le freinage d'un engin pendulaire est totalement différent des notions habituelles. -- Un frein traditionnel est un super frottement que l'on contrôle pour éviter le dérapage afin d'arriver à vitesse zéro avec roues bloquées. -- Un freinage de roue électrique nécessite de commander une vitesse arrière à la limite du fesse-plante. Arrivé à vitesse nulle, si on maintient la commande, on repart en arrière. L'expertise du pilote est fondamentale. Si on regarde les bons pilotes, on voit que ce n'est pas à la portée d'un quidam lambda. Exemple : Si le sol est sec et propre il n'y aura pas de glissade et le problème est élémentaire : il faut que le moteur absorbe l'énergie cinétique de l'ensemble pilote+roue. L'énergie cinétique de la forme ½.m.V2 donc la masse et le carré de la vitesse interviennent. Plus l'énergie cinétique est grande et plus le moteur mettra de temps pour la dissiper, donc plus la distance de freinage sera longue. Ce freinage théorique limite est facile à calculer, et vous pouvez éventuellement y ajouter le temps de réaction du pilote. La géométrie de la roue a peu d'importance (diamètre, longueur/hauteur de pédales...), c'est sa puissance moteur qui importe... et la "bonne volonté" des batteries à absorber cette énergie. Car bien sûr le moteur devient générateur et renvoie le courant vers les batteries : -- si les accus sont pleins, seule la carte mère (si elle est bien conçue) peut absorber les joules -- si les accus sont (quasi) vides, le freinage est excellent, le couple est supérieur au couple de démarrage car la force électromotrice s'additionne à la tension batterie. Même si le mouvement de freinage n'est pas facile à bien faire, face à un obstacle nos instincts peuvent nous aider à "jeter" les pieds en avant... Sur certaine roues, il y a une aide au freinage consistant à retarder l'inversion de couple pour accentuer le déséquilibre arrière. Perso, je ne suis pas convaincu par la pertinence de ce truc. Sur les cyclos mono-roue (position assise) ce décalage artificiel arrière est commande par une poignée de frein.

-
Ça me rappelle ce que ma femme disait de son nouveau vae. Simplement le cinémomètre était en miles/heure .
-
KS18L qui ne charge plus suite à un chargeur mal monté
Techos78 a répondu à un(e) sujet de Pierre Kaillou dans KingSong
Menfin, si il s'appelle XT60, c'est qu'il est (théoriquement) capable de passer 60A. Et si c'est trop juste, on passe au XT90 ou au XT120. Pour recoller au sujet, je pense que la ks18L a des packs avec 3 fils reliés par des connecteur MT60 Les packs sont reliés à la carte mère, qui est reliée au port de charge. C'est une structure intelligente, il est même possible que les diodes anti-retour soient sur cette cm... Tout cela est à confirmer.
-
KS18L qui ne charge plus suite à un chargeur mal monté
Techos78 a répondu à un(e) sujet de Pierre Kaillou dans KingSong
Bon, le T-plug est un peu juste côté utilisation, 10 Ampères seulement. -
KS18L qui ne charge plus suite à un chargeur mal monté
Techos78 a répondu à un(e) sujet de Pierre Kaillou dans KingSong
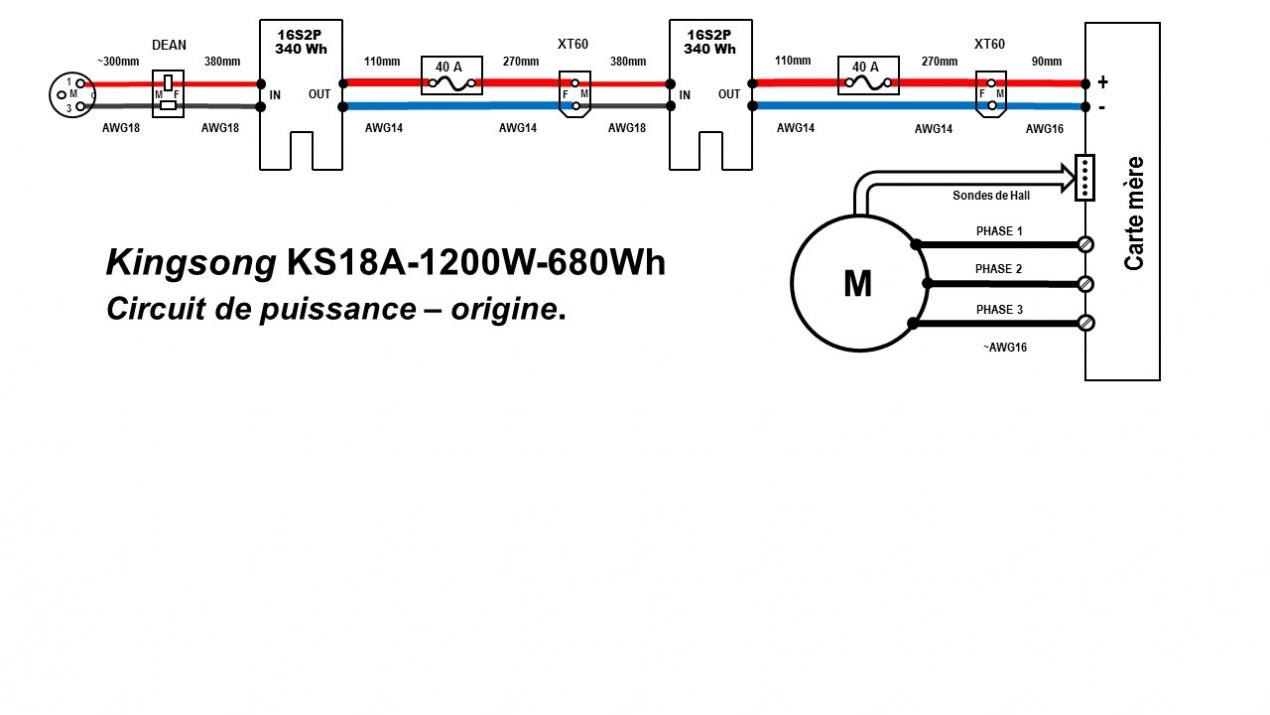
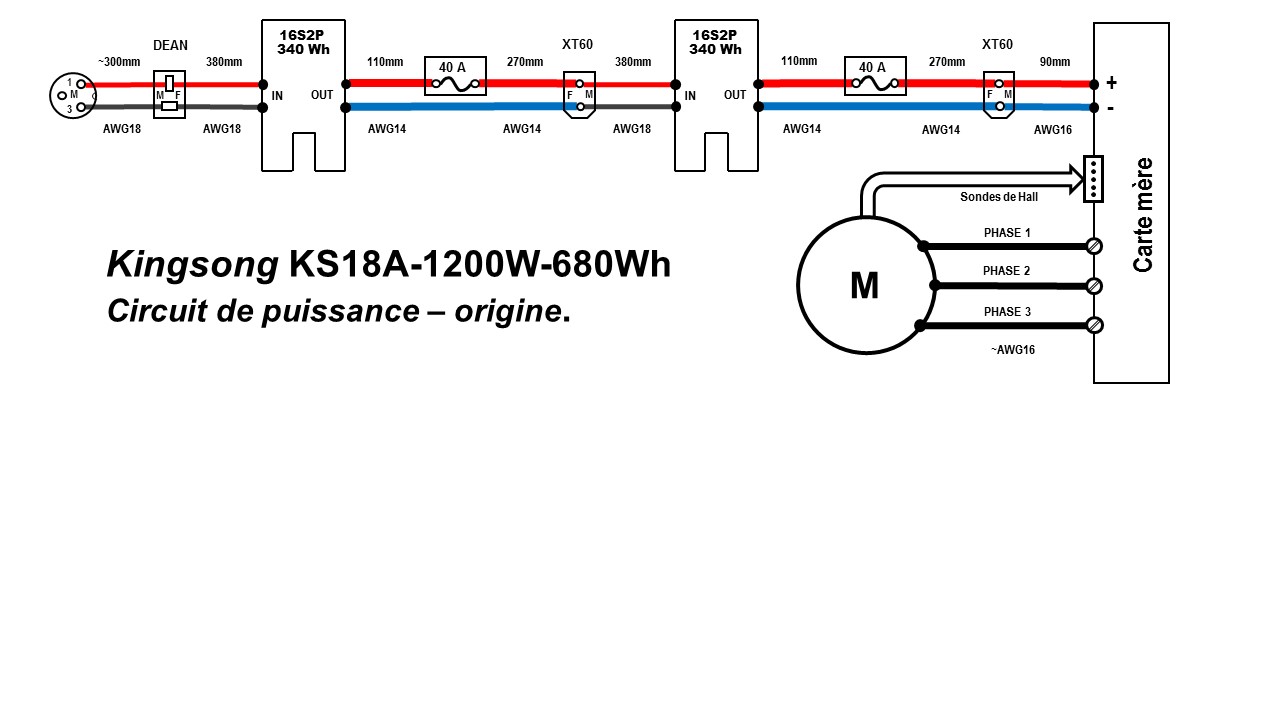
Oui, avec une petite nuance. La ks16b a les deux packs en cascade, ils ne sont donc pas équipés des mêmes connecteurs. Je n'ai pas relevé le schéma de cette roue, mais pour la ks18a d'origine (que j'ai gonflée par la suite) c'était ça : Donc là aussi montage en cascade, mais dans la 16b il n'y a qu'un seul fusible (40A) sur la carte mère. Le connecteur Deans T-plug est une valeur sûre, je recommande ( @Hansolo aussi ). Pour le branchement il n'y a pas d'équivoque. Il y a C comme Charge et P comme ... Pétez vous la tronche. Plus sérieusement les zones d'accueil disponibles sont probablement prévues pour un branchement direct en //, ou pour du test, d'ailleurs ce n'est pas moi qui ait fait les soudures non utilisées. C'est l'état d'origine d'une des premières roues, livrées par avion.