



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
Il ne faut pas être impatient, au bout de quelques milliers de km le pilotage devient vraiment machinal. Ce n'est pas la tête qui bosse, c'est le corps, il suffit de vouloir poser la gomme à un endroit et ça se fait quasiment tout seul. Rester fluide, jambes et pieds symétriques, surveiller l'état de la route pour anticiper les irrégularités (et les obstacles imprévus, coups de vent...), jambes semi-pliées si le revêtement est moche. Avec l'expérience, il faut éventuellement faire quelques mouvements de pieds pour faire circuler le sang et limiter l'ankylose. Et s'arrêter 2 ou 3 mn toutes les heures pour détendre les jambes, surtout pour les vieux comme moi qui tétanisent facilement. Attention à la fatigue, après plusieurs heures on perd de la stabilité. Absolument, même si ce n'est pas toujours facile. Je constate que je suis souvent trop rigide épaules--cou--tête. Bien respirer en regardant l'horizon sur 180° permet de huiler les rouages. La différence entre un bon danseur et un sac à patates est subtile, il faut essayer de faire partie du premier groupe .
-
Batterie externe ? Speedy feet a utilisé ça, mais cela nécessite un câblage traversant...

-
Bizarre, c'est moi qui suis miro ou bien 1radwerkstatt a disparu ? Edit : Vu, merci @sbouju (ci-dessous). Cette société ne doit pas marcher très fort, elle est dans les profondeurs de l'indexation Google... Je leur en veux un peu de ne pas avoir donné de suite à leurs pédales longues pour ks18, heureusement que les yankees ont mis la pression sur ks... Ceci n'ayant aucun rapport avec la batterie

-
Pas toujours évident d'émuler des jeux amiga : la moitié de ceux-ci étaient buggés à cause des softeux qui se mélangeaient les pinceaux pour gérer les pointeurs en C, ce qui aboutissait à une écriture à l'adresse 000 ce qui était sans importance sur amiga (zone de ram) mais inacceptable sur beaucoup d'autre machines (zone de vecteurs) d'où galère pour traiter les exceptions... Edit : j'ai peur d'être un peu hs, là...
- 949 réponses
-
- aliexpress
- bon plan
- gotway
- ninebot
-
Étiqueté avec :
-
@King Size : pour exploiter ton amiga, il faut trouver une TV péritel chez un antiquaire
- 949 réponses
-
-

- 1
-
-
- aliexpress
- bon plan
- gotway
- ninebot
-
Étiqueté avec :
-
Belle alim programmable, bien pensée pour charger les accus, mais pas que... Perso, professionnellement, j'ai régulièrement utilisé des alims programmables, soit pour maîtriser le temps d'application de la tension (ce qui conditionne le temps de reset, de démarrage des quartz...), mais surtout pour du test de réseau avion. Les équipements sont alimentés le plus souvent en 28Vdc, mais cette tension est très variable (souvent 16V...32V) avec des perturbations de type transitoires, subtransitoires, microcoupures qui vont de 12V à 60V. Au dessus, ce sont les protections Foudre et ESD qui interviennent. Pour tester tout ça il faut imposer des profils précis en fonction des normes applicables... Bref. Pour les accus, je ne sais pas si cet appareil peut monter au dessus de 62V car c'est trop peu pour nos e-roues (sauf peut-être 9Bot ?). Mais le fin du fin ne serait pas de charger à courant constant dans la première zone, mais à puissance constante. Là, des appareils (générateurs ou charges dynamiques) qui gèrent la puissance constante sont très rares mais j'en connais (cela suppose un asservissement chiadé), mais c'est pourtant comme ça que fonctionnent nos roues et plus généralement toutes les alims à découpage. Et donc, pour mesurer le profil de décharge d'un accu, la seule méthode sérieuse est l'utilisation d'une charge dynamique configurée sur puissance constante. (c'est une courbe un peu parabolique, concavité vers le bas).
-
Chez KS, pour les roues avec 2 ports usb, il y en a un avec uniquement les fils d'alim branchés (5 Volts), mais on ne sait pas si elle peut fournir la valeur standard 2 Ampères... La deuxième prise a les 4 fils branchés, on peut y connecter une petite clé usb et la roue pourra jouer le/les fichier(s) mp3 qui sont à la racine. Mieux que cela : il est possible de mettre le firmware sur la clé usb (dans un format spécial avec le nom adéquat) et hop, le soft est flashé automatiquement. Cette procédure a été utilisée pour diffuser dans l'urgence la correction de l'instabilité au freinage mise en évidence par Kuji Rolls sur la ks16x. Cela semble être un excellent moyen pour les sav de réinitialiser une roue briquée sans avoir à l'ouvrir pour brancher une sonde.
-
Ben oui, comme tout le monde . C'est le principe de nos engins pendulaires : un déséquilibre est compensé par la roue à l'aide d'une variation de vitesse, et la roue garde la vitesse acquise dès que l'équilibre est rétabli (même sans pilote). Nous gardons cependant une petite inclinaison pour lutter contre les pressions aérodynamiques et pour que notre corps servent de point d'appui au couple de résistance à l'avancement du pneumatique. (action--réaction, 3ième loi de Newton, pour avancer la roue a besoin d'essayer de nous soulever les orteils, surtout dans les montées d'ailleurs).
-
Juste pour info. Un certain nombre de V8 ont un défaut de montage de l'axe moteur vis à vis des flasques internes. Bizarrement personne (à ma connaissance) n'a diffusé de photo, mais le bruit de claquement au passage av-ar fait penser à une goupille mal calibrée/ajustée comme c'est arrivé à la Gotway Monster : (une des roues de @Erwanrcx ) Inmotion a remplacé quelques moteurs, en faisant traîner les choses le plus possible, réussir à faire prendre ce défaut en sav est un vrai parcours du combattant. A priori Urban360 a su réparer cela en faisant une soudure, ce qui est difficile, risqué... je ne sais pas si cette intervention critique les intéresse et quel en serait le tarif... C'est juste une hypothèse. Mais attention, si c'est effectivement la goupille qui est en train de se barrer, l'axe peut tourner franchement par rapport à la roue, en arrachant les fils (qui passent dans l'axe), c'est coupure immédiate, grillage de cm etc...
-
Juste pour comparer, voilà la structure d'une ancienne pédale V2 Kingsong : Les KS ont beaucoup de matière le long de l'axe et la butée-poignée minimise l'effort de bras de levier qui tend à déchirer l'articulation. A l’œil, la structure Inmition semble effectivement assez fragile, d'autant plus que le poids pilote est vendu pour 120 kg, ce qui n'est pas le cas pour KS...
-
Aaahhh, cette piste cyclable le long du lac, quelle merveille ... assurément une des plus belle de France, le long de la barre rocheuse avec éventuellement des parapentistes... Par contre, la boucle nord-est par la route est plus tortueuse... et théoriquement prohibée pour nos edpm... Merci à tous ceux qui réclamaient une "clarification de l'utilisation de l'espace public".
-
Tout à fait. Il est clair qu'envisager de démarrer en trottinette avec le pieds d'appel du côté le moins fragile de l'axe part d'un bon sentiment. Honnêtement, je ne pense vraiment pas que cela change grand chose. Oui, les bouts d'axe sont assez fragiles, mais ils souffrent surtout lors des impacts (nids de poule, ornières transverses...) et beaucoup moins lors du démarrage. Il faut surtout penser à rester très souple, avec les jambes semi-fléchies dès que le revêtement est dégradé. Il faut éviter absolument de descendre les bateaux jambes raides, et donc bannir les chocs verticaux (trop) violents. Un détail : le sens du pneu est quelconque sur une roue, même si (surtout par habitude) il est plus esthétique d'orienter les sculptures dans le bon sens. Une roue ne dérape pas et n'est pas sujette à l'aquaplaning.
-
Euh, c'est pas toujours le cas, même pour un vsae (vélo sans assistance électrique) ?
-
J'ai eu droit une seule fois à un basculement avant sur la petite ks16b lors d'une accélération excessive (une voiture aux fesses !) avec une batterie à ~30%. J'ai rattrapé ça un peu limite... et j'ai mis 3 jours à m'en remettre, l'impression d'écroulement est vraiment horrible. J'ai longtemps cru à un tilt-front mais non, c'était un début de décrochage moteur. Et c'est ça la difficulté, distinguer tf et décrochage. C'est sûr, en descente avec batterie pleine, le moteur décroche facilement car la cm ne peut pas lui injecter suffisamment de courant pour générer le couple nécessaire, d'où perte d'équilibre.
-
Hummm, j'ai du mal à y croire, cela me semble une ânerie tellement énorme de la part d'Inmotion que cela nécessite une confirmation. Même sur une roue "polarisée", le tilt-back doit être impérativement réversible car rien n'empêche le pilote de faire de la marche arrière. Par principe, en marche avant, la roue crée un tb en faisant "une petite pointe de vitesse fugitive" qui diminue le déséquilibre (entre centre de gravité pilote et point de contact au sol) . C'est une alarme active qui est ressentie par le pilote comme un relèvement des pédales. Si le tb n'est pas inversé en marche arrière, c'est un tilt-front qui tend à accroître le déséquilibre excessif, et aucune roue ne doit faire ce genre de chose. En un mot, ce serait une connerie monstrueuse qui pourrait inciter à boycotter une roue aussi mal conçue.
-
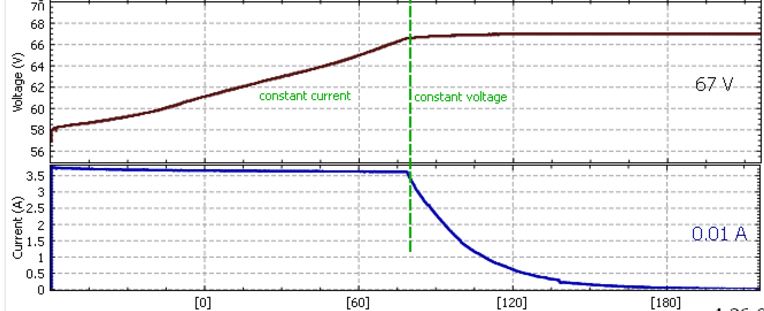
Je confirme, encore que j'ignore tout de ma tension (je ne vais jamais chez un toubib), la puissance, bon faut faire avec, je dirais que c'est la résistance qui diminue et certaines douleurs qui se manifestent avec intensité... Bien, le réglage de tension est OK, il restera à régler le courant. Bon, la méthode de réglage du courant sur un court-circuit crée souvent une étincelle (il y a des capas à vider), on peut aussi régler le courant au minimum, brancher la charge (l'accu) et augmenter ce réglage à la valeur qui va bien. Pour une charge d'accu, il faut savoir dans quelle phase on est : d'abord régulation en courant (la tension croît), puis maintient de la tension (le courant décroit). Exemple : Le réglage du courant concerne uniquement la première zone "constant current", il faut donc que l'accu ne soit pas trop chargé... Remarque : la puissance (le produit U.I) de l'on injecte est variable, elle monte linéairement, elle est maximum à la limite des deux zones, puis elle décroit de manière exponentielle. Si le bms a un système d'équilibrage, le courant ne tombe pas à zéro mais environ à 40 mA stables qui ne passent pas dans les cellules mais dans des petites résistances (bypass). Un CD2 fait une (petite) erreur en comptabilisant cette énergie finale qui ne sert qu'à chauffer la pièce.
-
Diable, la nuance m'échappe. L'objet de ce fil est bien le sens de déplacement de la roue, la position du pilote est sans importance... Faut-il aussi considérer cette position ? : Pour le pendule, je suis moins stricte que @King Size , je pense qu'on peut se permettre un pendule doux, juste dans le but de maintenir l'équilibre, un pendule dur est dangereux pour la roue et fatigant pour le pilote car il s'obtient en recherchant un déséquilibre maxi ce qui nécessite aussi des efforts musculaires. Pour l'anecdote, il y a la vidéo de Méline Moultipass qui encourage à faire ce genre d'exercice, je suis sûr que ce n'est pas dans le but d'occuper les sav : https://youtu.be/UQe1GwGwPhs Le mouvement lui-même n'est pas très élégant, je ne sais pas trop pourquoi mais il me fait penser à l'expression triviale :"peine-à-jouir".

-
Un kit très facile à installer, avec un galet (comme un Solex !)
-
J'ai 3 roues symétriques (palindromiques), je les utilise dans n'importe quel sens, c'est absolument kif kif. (effectivement, l'éclairage commute). Ce qui n'est pas équivalent c'est la puissance d'accélération et la puissance de freinage : Dans le premier cas la fcem se retranche, dans le second elle s'additionne. Le freinage est théoriquement plus efficace, sauf qu'on hésite beaucoup plus à se pencher en arrière. Je pense à un autre truc qu' @Hansolo a dit à propos de son compteur kilométrique filaire : les roues GW comptabilisent la distance de manière signée, j'en déduit que c'est l'appli qui fait la valeur absolue. Un gars qui se débrouille bien : Perso, ça m'énerve ééénormément, ça fait 3 ans que j'insiste mais je suis toujours instable en marche arrière, et mes virage prennent toute la largeur du terrain. Je pense que je n'arriverai jamais à tirer une belle ligne droite.
-
Dans un réseau triphasé, il faut bien avoir en tête les notions de tensions simples et tensions composées. -- Dans le montage étoile, le point commun au centre est à tension nulle (si les 3 phases sont équilibrées), et chaque enroulement reçoit une tension simple -- Dans le montage triangle, chaque enroulement est branché entre 2 phases, c'est une tension composée dont la somme vectorielle lui donne une valeur √3 fois + grande que la tension simple, c'est à dire 1,732 fois plus de tension sur chaque enroulement en passant d'étoile en triangle. Ce sont des notions classiques et je suis sûr que beaucoup connaissent la tension simple du triphasé 220V (oui, c'est 127V) et pour le 380V tri c'est 220V mono, et c'est la tension la plus répandue en France. En résumé, on suralimente le moteur dans un rapport √3 , la vitesse est donc supérieure et il n'y a donc aucune raison que le couple soit plus faible, bien au contraire.
-
Perso, je m'interroge sur la tenue à long terme des roulements. Bien sûr, il sont flasqués "étanche", mais les caoutchoucs néoprène ne sont pas toujours au top, ils durcissent et s'usent, et souvent c'est l'axe qui s'use le plus. (c'est bluffant, la pièce la plus dure qui s'use plus vite). Ayant eu l'occasion de changer d'anciennes pompes de machines à laver, j'ai constaté que les joints spi ce n'est pas la joie. (Ouf, maintenant les rotors de pompe sont totalement cartérisés, mais là c'est carrément hors sujet). Donc on fait quoi ? Un changement de roulement à 20000 km ?
-
A mon avis, l'indice IP est un peu trop global dans le cas d'une roue. Ce qui est absolument nécessaire, c'est une étanchéité parfaite du passage de roue. Les roues ont un plan de joint entre les deux coques, une chicane ne suffit pas il faut un joint sérieux (silicone...) qui garantisse la fonction "garde-boue" afin de pouvoir rouler sur une flaque qui génère des projections d'eau rapides. De plus il y a souvent une zone "ouverte" avec un radiateur et la carte mère juste derrière. Le souci est qu'on a du mal à inspecter ce joint (qui peut se décoller, s'arracher) car démonter la roue est toujours extrêmement pénible... ou bien on achète un endoscope . On peut par exemple garder en tête le gag d'Inmotion qui a livré des roues sans joint, avec une batterie non capotée juste au-dessus... évidemment il a fallu créer vite fait un kit pour réparer cette connerie. (c'est juste un exemple, aucune roue n'est parfaite). L'étanchéité externe est nettement moins critique, elle reçoit une pluie relativement verticale, elle est partiellement protégée par le pilote, et un simple sac plastique peut servir d'imper si la pluie est forte. Il est très fréquent de voir des vidéos de roulage dans de grosses flaques avec à peu près n'importe quelle roue. Exemple avec une M-ten lors la rando e-roue du 01/10/17, sous l’œil bienveillant de l'importateur GW (j'en profite pour saluer Jérôme de @Eroue , il m'a offert à plusieurs reprises de belles randos... avec une bière ),

-
C'est surtout une impression, je n'ai pas vu de retour précis sur ce sujet. IP54, je ne savais pas, je suis un peu étonné mais j'admets avoir eu tord. Comme c'est la coque externe qui enferme le moteur, il y a pas les nombreuses vis que l'on a dans le cas classique des carters de moteur, mais après tout si les coques sont bien jointes, l'indice 4 est tenable. Tu as eu raison de protester @michmuch , cette ips i5 est décidément une roue pleine de bonnes surprises.
-
Nous assistons à une discussion entre initiés, @sbouju et @.AleX. parlent de Citizen Band radio , l'ancêtre de fesse-de-bouc j'imagine...
-
Oui, c'est plutôt bizarre, mais tant mieux. Un pack a quand même une certaine résistance équivalente en série avec les fils de charge, on peut avoir une idée en chargeant pas exemple une e-roue allumée, et en regardant la différence entre la tension interne (appli) et externe (CD2). Pour info, les bms ne régulent pas le courant parce que c'est encombrant (transfo ou capas commutées), les pwm font ce qu'ils peuvent mais le rendement n'est pas terrible. Nos chargeurs chauffent... Beau module alim DC--DC, sa structure Buck Boost lui permet d'être élévateur et abaisseur. Il semble effectivement très élaboré et il est prévu pour fonctionner à courant constant en tant que chargeur. Le principe est bon, si les tensions et le courant correspondent au besoin, je pense que c'est OK (je n'ai pas détaillé). Il faudra surveiller l'aspect thermique, vue la taille une petite ventilation peut aider...


