



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
Que se passe-t-il ? les diodes sont hs ou bien c'est le connecteur dessoudé qui te gène ? Si tu ne trouves pas, je t'incite à réparer cette plaquette, même un fer à soudé ordinaire suffit. Pour changer les diodes, il faut en commander probablement 50, par exemple : https://fr.rs-online.com/web/p/led/6545818/ , il faut vérifier si la dimension correspond et si anode-cathode ne sont pas inversées...
-
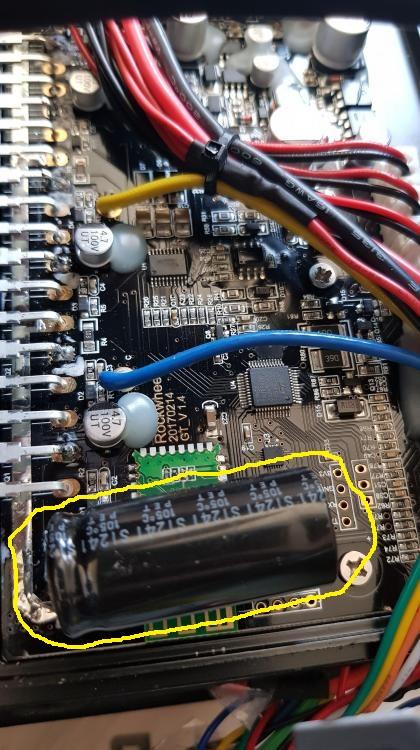
C'est à cause des deux machins noirs, ce sont des condensateurs de découplage de forte valeur qui stabilisent la tension batterie. Lors de la connexion du premier pack, ils se chargent brutalement d'où étincelle,, mais pas pour le second pack puisqu'ils sont déjà chargés. Inversement, si tu veux faire un reset de la carte mère (quand le soft cafouille) afin de la redémarrer proprement, il faut débrancher toutes les batteries et attendre une quinzaine de secondes que ces condensateurs se vident. On peut accélérer en appuyant sur ON ce qui alimente (fugitivement) le moteur.
-
Comme l'a évoqué @sbouju et quelques autres, il est exact que la charge sur la roue n'a pas beaucoup d'importance sur l'odomètre. Considérer le rayon apparent au point de contact ne marche pas, car au bout d'un tour de roue, on a déroulé une longueur de bande de roulement, parce que les flancs se déforment. On voit mieux avec une roue souple : C'est un peu comme ça aussi sur les véhicules à chenilles, celles-ci faisant office de bande de roulement indépendante.

-
Je ne parlais pas de modélisme, pour lequel tout est beaucoup plus facile. C'est de la physique : la puissance varie comme le carré de l'échelle, la masse varie comme le cube, sans oublier que l'air est plus portant à petite échelle. Une puce qui saute 200 mètres à notre échelle, c'est bidon. A contrario, faire une maquette de mouche de 30 cm, c'est difficile, voir impossible. Bon, peut-être qu'il n'y a pas d'hélico qui vole à l'envers parce que... ça n'a aucun intérêt. Mais comme le montre Franquin dans Idées Noires, les pales au-dessus compliquent l'utilisation du siège éjectable :
-
Non, la comparaison avec une roue 1 axe ou 2 (voir ici ) ne convient pas car la roue a un contact au sol et il lui suffit de créer des incréments de vitesse pour redresser le centre de gravité de l'ensemble. On est plus dans le domaine de l'hélicoptère, sauf que celui-ci est stable car il est pendu sous sa voilure (même quand il fait un looping). Il est exact qu'une centrale d'attitude gyroscopique peut commander par exemple le vol stationnaire, en agissant sur les inclinaisons X et Y de la tête de rotor ainsi que sur les commandes cycliques, mais ceci assez lentement, et à ce jour les hélicos ne peuvent pas voler à l'envers, avec les pales en dessous. A mon avis, c'est au pilote d'assurer l'équilibre, et c'est pour ça qu'il est obligé de porter des pompes de ski.
-
Il est clair que c'est un pilotage plutôt touchy. Il me semble, le X et Y avec la position du corps, le Z et la rotation en cap au joystick... Pour l'équilibre, j'imagine que c'est aussi difficile qu'une boule de cirque sur un parquet ciré : Plus simple : une savonnette dans la salle de bain... Bon courage... Ceci dit, le flyboard offre une motricité que n'ont pas la boule ou la savonnette, tant qu'il y a du carburant
-
Excellente, la vidéo "Big gun". Dans les films on voit souvent l'inverse, le tireur tient l'arme entre le pouce et l'index, et la cible recule de 3 mètres... A la réflexion, j'ai fait une erreur : l'ascenseur (the fall) qui traverse la terre ne met pas les passagers en apesanteur juste au milieu, mais bien sûr tout le long du trajet puisque c'est un engin balistique. Le film est faux, ça me déçoit un peu... L'A300-zéro-g simule une micro-gravité en prenant une trajectoire balistique (parabolique). Pour évoquer aussi la musique, je peux citer le groupe OK Go :
-
Merci pour cette réponse détaillée. Je suis toujours bluffé par la capacité des ondes électro-magnétiques de s’immiscer partout. Un trou d'un diamètre λ/2 (demie longueur d'onde) n'affaiblit pas du tout le signal... A 2,4 GHz, un trou de 6 cm suffit, c'est OK, autant pour moi, je n'ai rien dit.
-
C'est ce genre de problème qu'on se posait il y a quelques décennies quand c'était la mode d'encombrer nos salons avec d'énormes enceintes hi-fi : quelle est la puissance nécessaire pour reproduire une simple sonnerie de porte drrriiinnnggg (pas ding-dong) ? Eh bien la réponse est : plusieurs dizaines de Watts !. Avec une centaine de Watts, la reproduction est à peu près correcte. C'est dû à la nature du bruit, le choc du marteau sur la cloche est un signal avec un front de montée très rapide. Quand on décompose ce signal selon ses différentes raies spectrales, on voit qu'il est nécessaire d'avoir une bande passante qui dépasse 100 kHz. C'est un paradoxe, notre oreille est théoriquement incapable de percevoir ces fréquences, et pourtant on distingue quand même une reproduction trop limitée. Ce sont essentiellement les tweeters qui travaillent, les meilleurs sont à chambre de compression, car il faut déplacer les molécules d'air rapidement ce que ne peut pas faire une simple membrane.... En résumé, une synthèse correcte des bruits de chocs (sonneries, applaudissements...) nécessite des baffles de studio, avec les amplis associés, ce qui n'est pas évident à alimenter et transporter. Mais maintenant on est moins difficile et on peut se contenter d'un bruit issu d'une plaquette piézo-céramique. Si on cherche de la puissance il faut se caler sur la fréquence de résonance, comme par exemple les détecteurs de fumée et autres alarmes...
-
Soyons clair, je n'y connais rien en e-trott's. Cependant, j'ai repéré un truc qui m'amuse avec son look Méccano , c'est la Mercane MX60 qui a une batterie extractible (le deck s'ouvre avec un bouton à code), ce qui est un avantage a priori unique : C'est une 11", avec amortisseurs pneumatiques, possibilité de siège et porte bagage... Sur le papier, c'est pas mal, mais elle n'est pas connue et Mercane a une réputation assez moyenne... Edit : j'ai regardé rapidement cette vidéo russe : https://www.youtube.com/watch?v=0Nh3FzhfTHo Un gros bébé de 35 kg qui emmène rapidement son pilote (relativement corpulent) à 50 km/h. La mécanique semble saine, et correspond à ton budget... est-ce risqué... j'sais pas... dans le contexte actuel...
-
Aaahh, je ne résiste pas, je pose une question hors sujet : Dites les gars, sur vos GT16, vous n'avez pas des problèmes de liaison bluetooth ? Parce que "poser" un gros condensateur de découplage juste sur l'antenne, ça ne me parait pas très judicieux... La portée théorique est 10 mètres, et effectivement lors d'une rando, un cornichon m'envoyait de la musique sur ma KS à 12/15 mètres Edit : à propos des soudures des mosfets. Elles sont réalisées manuellement, et ce n'est pas facile car elles sont connectées à des pistes larges, difficiles à chauffer même si elles ont un frein thermique (petit rétrécissement en étoile). L'important est que la brasure remonte bien dans le trou métallisé. Assez souvent la brasure ne mouille pas correctement la seconde pastille, il faut compléter sur l'autre face. Cela n'a pas été fait, c'est dommage mais pas catastrophique.
-
On a déjà eu droit à ce genre d'image : Outre qu'il est déraisonnable de se mettre à la queue-leu-leu avec ce genre d'outillage, j'ai quelques doutes sur le comportement d'un engin pendulaire ou sustenté du fait du recul de l'arme. D'expérience, un PA 9mm, ça secoue bien la paluche, le FSA 7,5mm ça vous ruine la clavicule, quand au PM 9mm, on commence en bas à gauche et au bout de la 3ième balle on est déjà en haut à droite. Rappelez vous le film Total Recal (2012), dans l'ascenseur qui traverse la terre, au milieu de la trajectoire (en apesanteur donc), le héro se sert d'un fusil automatique pour se déplacer... Action ---> réaction, toujours la même histoire.


-
-
-
Très bien, @Joe Bix , c'est un métier rare, pendant mes 43 ans d'activité j'ai côtoyé des centaines d'ingénieurs électroniciens (en analogique et/ou logique, puissance, hyper-fréquence...) mais pas plus de 5 spécialistes en sûreté de fonctionnement. Ce métier ne m'aurait pas trop attiré, il faut noircir des tonnes de papier, par exemple un simple rapport sdf pour une centrale d'attitude hélicoptère nécessite ~150 pages de justification... je préfère des jobs un peu plus concrets, matériels. Tout développement méthodologique a en gros 3 étapes, on fixe des objectifs, on crée l'équipement ou le système, puis on le valide. Bien sûr, les objectifs de sûreté/fiabilité sont fixés dès le départ, mais les gars sdf interviennent (trop souvent) très tard dans les cycles de développement. C'est naturel, ils font un "constat des lieux", ils cassent les baraques et retardent les programmes . Bref. Bien entendu, personne n'a les moyens d'analyser complètement une roue, il faudrait la nomenclature complète de tous les éléments et process utilisés pour les chiffrages mtbf, les structures fonctionnelles, le niveau de qualité du firmware... sans oublier le niveau d'organisation du concepteur/constructeur (iso9001 etc...) >>> Mais on peut essayer de caractériser les objectifs : @Joe Bix , pour toi, quel est le mtbf minimum nécessaire pour une e-roue ? (je parle bien sûr des pannes majeures, pas d'une led hs...)
-
La mousse qui recouvre les pads de la ks16 est fine car ce sont les compartiments à batterie (qui font bobo aux mollets...). Ces garnitures ne nécessitent pas d'être déposées, on peut donc oublier le double face et passer à une colle plus sérieuse. Pour les matières souples comme ça, je ne connais que la colle néoprène, qui nécessite une technique particulière : il faut enduire les deux lèvres de la plaie en mouillant bien la surface mais avec une couche fine, laisser sécher 5 minutes ou un peu plus, puis refermer la plaie avec précision car les erreurs de position ne sont pas rattrapables. On est souvent impatients et on referme trop tôt et ça colle mal. On peut mettre un scotch provisoire le temps que le solvant s'évapore, en évitant que le scotch touche la fissure... Edit : selon les utilisations, on peut préférer la colle liquide ou en gel. Dans un cas comme ça, je préconise la colle liquide étalée rapidement avec une allumette taillée en biseau.
-
-
Oui et non. En aéronautique toute catégorie il est habituel d'équiper le côté gauche indépendamment du côté droit (chaque côté ayant ses propres redondances), et c'est un peu ce qui appliqué sur cette IPS. Bon, la notion droite-gauche n'existe pas pour une roue, il y a une fonction "centrale" et c'est tout. Il est donc plus logique de faire des comparaisons avec les hélicoptères. On peut remarquer que même les hélicos peuvent être bi-turbines... Les militaires ont des exigences particulières. Il y a deux niveaux (très) différents de sécurité : les pannes qui provoquent l'échec de la mission et les pannes qui compromettent la vie du/des pilote(s). Pour le second cas, il faut garder en tête qu'il y a un super joker : l'éjection, ce qui n'est pas envisageable pour un avion civile... ou pour une roue. Les éléments utilisés sont de haute qualité (composants électroniques -55...+125°C etc), la simplicité structurelle peut cacher des besoins techniques monstrueux. Juste pour l'anecdote, et pour citer un exemple d'hélico moderne, sur le NH90, certaines cartes comportent deux fois les mêmes fonctions, mais une partie avec des composants issus d'un fabricant et l'autre partie d'un autre fabricant, ceci pour limiter les pannes communes. Avec ce genre de plaisanterie, j'ai envoyé des poignées de cheveux au Père Lachaise, car dans les sociétés les gestions des composants ne matche pas du tout cela (part numbers communs pour toutes les secondes sources). Bref, le secteur militaire est vraiment à part. Maybe yes, maybe no . Certains, dont je fait partie, émettent des doutes sur la pertinence du concept IPS, mais ce sont de simples opinions et on se garde bien d'annoncer des chiffres, car les chiffres... il faut les démontrer. Et cela demande des compétences particulières (que je n'ai pas), c'est un métier très pointu (spécialiste sdf), c'est un gros boulot. Personne n'a envie de descendre IPS en flamme, ils ont une initiative sympathique, et le châssis-coque de la roue est digne d'éloge. Mais il faut prendre du recul par rapport aux arguments marketing. Et il ne faut pas masquer certains inconvénients : par exemple l'étanchéité du passage de roue qui n'est plus assuré, ni à gauche, ni à droite...
-
Oui, comme @minch , je suis d'accord avec @papaCoursac. pour les systèmes de contrôle et de navigation (centrales, calculateurs...) il suffit d'en mettre plusieurs avec monitoring pour éliminer les éléments défectueux. Mais pour les actionneurs (les moteurs, vérins etc) ça se complique. Je connais bien l'A380 sur lequel j'ai bossé, les surfaces de contrôle (ailerons, rudder, gouverne de profondeur ...) sont fractionnées en plusieurs morceaux indépendants. Si une partie défectueuse part en butée, une autre partie OK va compenser dans l'autre sens, mais la manœuvrabilité sera très dégradée, mais pas suffisamment pour envoyer le coucou au tapis. Dans cette IPS, en mettant deux systèmes en tandem, cela peut aider à rattraper certains types de panne, mais cette amélioration de sdf (sûreté de fonctionnement - structurelle) risque (?) d'être annihilée du fait de la division par 2 du mtbf (mean time between failures) car il y a 2 fois plus de composants. Et dans d'autre types de pannes (court-circuit mosfets, capteur cassé...) un côté peut compenser l'autre, mais il est impossible d'assurer la fonction. (l'asservissement de verticale).
-
Chuuttt.

-
-
"La maire de Paris propose au préfet de Police de signer ensemble un arrêté. Les trottinettes électriques devront stationner sur les places de stationnement situées sur la chaussée et déjà utilisées par les voitures et les deux-roues motorisés." Exiger que les trotts soient stationnées sur des places pour voitures, c'est vraiment complètement con. Et il faudra aussi alimenter les parcmètres ?... Non, il faut garer les trotts sur les trottoirs et définir clairement sous quelles conditions. Légalement, le trottoir minimum doit faire 1,40 mètre libre de tout obstacle, et bien sûr nettement plus dans les rues très passantes. Une trott est beaucoup moins encombrante que les poubelles (certaines sont monstrueuses), pourtant les poubelles ne sont pas conduites à la fourrière, les propriétaires ne sont pas verbalisés (à ma connaissance). A mon avis, le problème principal est que les trotts en location sont instables sur leur béquille latérale, il faut une double béquille ou béquille centrale, blocage de la roue avant quand on tourne le guidon de 110°, les batteries obligatoirement sous le deck, autre... Ceci afin d'éviter qu'elles soient appuyées n'importe où, accrochées à des feux rouges, allongées par terre... Mais, bien sûr, interdiction de garer sa trott au fond de la Seine :
-
Ben non, c'est une originale de 1971, couleur vieil or, 2 ans + tard elle s'appelait 750 Four avec une ligne plus fine. Voilà, voilà, sujet clos.
-
Superbe ! Moi ça me convient tout à fait, mais, vu la tendance parano de ce forum, on va te dire qu'il manque casque intégral, protèges poignets, coudes, genoux, et peut-être même une coquille... Ceci dit, on n'a pas tous des muscles saillants, des abdom's tablette de chocolat. Pour la calvitie, on y pense, on y pense...
-
J'ai eu professionnellement plusieurs fois l'occasion de faire des mesures (sérieuses) de puissance sur des moteurs mono ou polyphasés. Je vous donne le truc. Pour une e-roue, il faut d'abord savoir clairement ce qu'on veut. Deux cas : (qui nécessitent un oscilloscope haut de gamme) -- électronique+moteur : C'est le plus simple. Il faut mesurer la tension et le courant délivrés par la batterie, et, selon la précision désirée, on filtre les ondulations et on fait le produit U.I (précision ~5%). Si on veut une précision d'environ 1% il faut faire le produit U.I de chaque échantillon (résolution 14 bit souhaitable) puis intégrer sur un nombre entier d'ondulations. Je rappelle qu'il ne faut pas confondre valeur moyenne et valeur efficace à cause de la nature quadratique des puissances. (le ratio n'est pas connu car les ondulations ne sont pas franchement sinusoïdales). - moteur seul. Le moteur est une boîte noire, on ne sait pas si les 3 phases sont en étoile ou en triangle. C'est dommage car en mettant le point commun de l'étoile à la masse, cela simplifierait les mesures. Bref. Le moteur est excité à l'aide d'un découpage sec par mosfets en demi-ponts, cela nécessite des précautions métrologiques. L'idéal est d'installer la manipe dans une cage de Faraday, non pas pour la cage elle-même, mais pour avoir une paillasse plein cuivre qui donne une référence de tension sérieuse. On mesure la tension entre deux phases à l'aide d'une sonde différentielle rapide (la fonction A-B d'un scope ne suffit pas), on mesure le courant dans cette branche avec un mini-shunt à l'aide d'une autre sonde différentielle. (il est peut-être possible d'utiliser une pince ampèremétrique ou une sonde emi). On fait le produit de chaque paires U.I (iso-datés), on intègre sur un nombre entier de période (si possible sur un tour de roue) et on multiplie par 3. D'expérience, la précision avoisine 2%. Pourquoi j'ai dit tout ça ? Simplement pour montrer qu'une mesure sérieuse de puissance est hors de porté de nos carte mère, les petits can (convertisseurs analogiques-numériques) des µcontrôleurs (généralement Cortex) font ce qu'ils peuvent et les facteurs d'échelle sont codés avec les pieds. Si la précision atteint 50%, c'est qu'on a beaucoup de pot... C'est purement indicatif, inutile de s'attarder là-dessus.





