
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
A la poignée, même s'il est vrai que ça bloque l'utilisation du trolley. Un portage trolley ouvert est peut-être possible, ce qui ferait perdre l'anti-emballement... C'est raisonnable. Cela fait 3 ans que les constructeurs annoncent des cellules Li-Ion 18650 3900 mAh, mais la demande mondiale actuelle est telle qu'ils n'ont pas de raison de se casser la tête pour améliorer leur techno... Une grosse roue comme ça peut monter/descendre les escaliers sans être portée. C'est plus long car il faut éviter que le pneu dérape sur le nez de marche. C'est ce que je fais avec mes 18". (ks18A/S = 23,5 kg). Mais je suis d'accord, au delà de 6 marches c'est galère, il faut porter.
-
Aille, juste un commentaire mais pas un conseil car je ne connaît pas la v10. Cela ressemble à une plante du µcontrôleur et j'ai l'impression qu'il va falloir ouvrir, débrancher les batteries, scruter tous les connecteurs (même les petites barrettes), et après une minute rebrancher (ça fait une étincelle). Après un reset à froid, la roue est sensée redémarrer correctement...
-
Tu as raison @Lovarda , même un grand gaillard comme celui-ci ne peut pas passer son pouce de l'autre côté de la poignée. Mais je pense que cela ne compromet pas (trop) la fonction portage, mais la fonction sécurisation du portage. Quand on porte une roue, ce sont les 4 doigts qui supportent la charge, le pouce s'oppose en face et sa position quasi verticale crée l'effet de pince qui solidarise main et poignée. Avec cette poignée extra large, le pouce repose sur le dessus, la préhension est moins efficace et le risque de laisser échapper la charge est réel surtout que dans des escaliers la roue butte contre l'extérieur de la jambe. En cas de crainte, on peut entrebâiller le trolley et saisir une demi-poignée, mais ça ne doit pas être très pratique et il y a un risque de se pincer. Donc ce ne sera pas hyper-pratique, mais ce trolley externe très discret est un compromis élégant qui permet de caser un maximum de batteries dans la coque. Et si cela ne convient vraiment pas, on peut ajouter une petite sangle...

-
Désolé @grattounet , relis le titre de ce topic, et tu verras que tu es hors sujet. Même si elle est mal placée, ta demande est tout à fait pertinente et nous sommes un paquet à attendre LA montre qui aurait toutes les qualités requises pour servir de tableau de bord. A mon avis, le plus dur c'est : autonomie 1 semaine mini, écran carré à affichage permanent (le mieux était le paper white Pebble, le lcd transflectif c'est pas top...). Mais on peut se demander si un afficheur très lumineux alimenté par l'usb et fixé sur la poignée de la roue n'est pas une bonne solution... A priori c'est dans ce sens que bosse Rockwheel avec sa future GT18... Allons bon, à mon tour d'être hors sujet

-
Sans blague, tu as toujours ce bug !. Tu as un vieux firmware, d'au moins 2 ans d'age, et même avec une vieille appli (la 1.4 installée manuellement, sans aucune question indiscrète) tu pourras rectifier ça. Cette vieille appli ne donne accès qu'au firmware 1,23 qui n'est pas le dernier : il n'y a pas la possibilité de paramétrer les leds latérales, mais il corrige le temps d'attente éventuel lors du power-on pour être sûr d'avoir le couple nominal. Cette rectification remet l'odomètre à zéro, et celui-ci compte avec un optimisme d'environ 22%. Flasher un firmware n'est pas bénin : il faut avoir une liaison internet très sûr (wi-fi conseillé) , ne pas pivoter l'écran , ne pas recevoir de coup de fil , en résumé 2 minutes de calme sont indispensables.
-
Au temps béni des applis non intrusives (version 1.4), mon ancestral Gestionnaire de fichiers Android 5.1.1 me disait : Root\Mémoire du téléphone\kingsong\download\16B.bin Bien entendu, les gsm modernes ont été nécessairement complexifiés, et les sont applis fatalement plus tordues, il faut donc s'attendre à tout, y compris à des fichiers cachés... Bonne recherche.
-
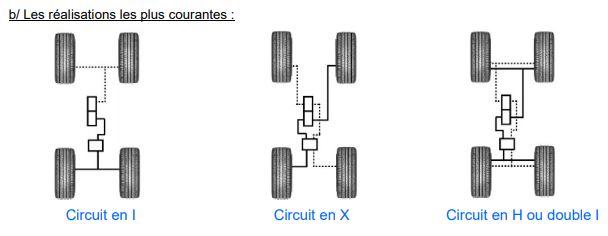
Mais si mais si, dans une voiture il y a deux maître-cylindres actionnés par la pédale et un circuit de freinage en I , X ou H :
-
Comme vous l'avez probablement remarqué, Nikola est le prénom de Tesla, le plus fabuleux inventeur du 20ième siècle.
-

taille des fichiers téléchargeables
Techos78 a répondu à un(e) sujet de Ludow dans Vos propositions d'améliorations
Je tiens à dire que cet hébergement local au niveau du fofo est une vraie bénédiction. On peut remarquer que, pour des vieux sujets, certaines images ne sont plus disponibles car les hébergeurs externes ont disparu. Ah, l'obsolescence, vaste sujet. Donc merci pour cette ressource particulièrement commode et bien intégrée. Edit : on peut remarquer que Google connait parfaitement l'adresse de cette banque, et qu'on retrouve les images au bout de 3 jours (avec leur lien espritroue) dans son indexation graphique... même si l'image n'est pas franchement pertinente pour le sujet. . J'ai l'impression que bien souvent leur robot de reconnaissance de formes perd son latin. Ça ne doit par être évident de créer des mots-clés judicieux. -
Super boulot @Goups83. Pour ceux qui veulent une photo Avant-Après, aller à https://www.espritroue.fr/topic/2772-changer-son-pneu-2125-en-25-sur-ks16/
-
Ah, @macreg , ça fait plaisir, un fan de GW qui n'est pas effrayé par le look Broadway. Tu as raison, cette roue semble avoir de nombreux atouts. Pour le poids, il n'y aura fatalement pas de miracle, châssis+batteries+moteur+pneumatique ce sera quasi inchangé, et la coque qui participe de manière marginale n'a pas de raison d'être hyper légère. Perso, je ne la trouve pas laide du tout. Juste les pads qui sont un peu petits et proéminents : j'espère que GW n'a pas eu l'idée saugrenue de mettre les enceintes à l'intérieur... Des zones larges et éventuellement un peu concaves seraient plus confortables. Et on ne sait toujours pas comment accéder à la valve . En verre ! Ça fait du bien un peu d'humour...
-
J'adore cette photo de notre grand artiste @Hirsute , qui nous a fait quelques démonstrations du plus bel effet : Donc oui, une roue sans son pilote peut poursuivre son chemin, tant que la batterie n'est pas vide. Si elle est équilibrée, elle va tout droit à vitesse constante. Si elle est déséquilibrée en roulis elle fait un cercle ou une spirale, si elle est déséquilibrée en tangage, elle accélère ou bien décélère. Elle se coupe quand son roulis dépasse ~45°. L'emballement d'une roue hors sol (quand on la porte) est un autre problème. De + en + de roues évitent cet inconvénient...

-
KS18L : version finale reçue, feebacks !
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
J'imagine que les firmwares des différentes roues ks se ressemblent, et que les messages vocaux sont les mêmes (?). Néanmoins, sur ma ks18s, quand je tape le bip3 à 36, j'obtiens clairement "Please decelerate", éventuellement répété. Il est exact qu'une ou deux fois, dans des descentes dynamiques, j'ai eu un message que je n'ai pas bien entendu, et qui pourrait faire penser à "Please slow down", et je ne suis même pas sûr d'avoir eu un début de tb à 38 parce que je me modère immédiatement. J'aurais donc tendance à penser que le "Plz decelerate" est pour le bip3 et le "Plz slow down" est pour le tb , mais je n'en suis pas sûr... Bien sûr, je pourrais lever le doute en programmant des valeurs inférieures, mais j'ai la flemme, et dès que la roue jacte, je lève le pied. Comme j'ai inhibé le bip1 et bip2, je n'ai pas constaté l'absence de beeper comme le dit @gordas06 , sauf peut-être hier quand j'ai couché ma roue dans une rampe boueuse : aucun bruit, sauf quand j'ai relevé la bête (- de 5 secondes après) elle m'a susurré "Plz. decelerate" jusqu'à ce que je l'oriente pour réduire l'emballement. C'est curieux, elle ne s'est pas coupé même avec la tête en bas. Pour info, aucun bobo nulle part, mais je confirme que les forêts sont un peu humides... En résumé, j'ai le bip au démarrage, à l'arrêt et au on/off de l'éclairage, et c'est tout. -
En fait, je pensais davantage au cracker qui modifie le soft. Ce n'est pas un microcéphale mais un mec vachement balèze, car accéder au code objet n'est pas facile (les µcontrôleurs sont protégés contre les lectures) et désassembler/interpréter ce code (non documenté) est long et demande beaucoup de compétence. L'exploit est réel, mais il faut être complètement cramé pour faire ça sur des engins pendulaires, c'est envoyer les gens au casse-pipe. Ceci dit, c'est juste une anecdote, je ne sais pas si cela s'applique au cas présent.
-
Une vidéo qui détaille le fonctionnement du bouton anti-emballement : Simple, efficace, what else ?
-
Un pneu plus large permet une pression plus faible, d'où amélioration du confort. Un pilote vertical sur une roue rigide = vertèbres en quinconce.
-
Pour encore plus de précision, voilà un axe cassé d'une ms3-1600. Je ne cite pas le wheeler, mais son pseudo commence par Erwan et se termine par rcx : Edit : comme je le dis souvent, l'idéal serait de sortir les fils des deux côtés, comme le fait KS.
-
Je pense qu'il ne faut pas faire trop de pub à genre de test, car cela risque de se multiplier. Entre autre, sur la Z10, il y a des crackers de l'Est qui s'amusent à jardiner dans le firmware pour modifier des limitations... https://electrotransport.ru/ussr/index.php?topic=56928.0 . Y a-t-il encore des traces de sang dans leur alcool ?.
-
<hs> Bonjour @Banane57 , les roues Inmotion ne sont pas du tout mauvaises, mais les systèmes de vente et de sav posent problèmes, il faut lire les sujets qui en parlent. Ne casse pas ta V5F, tu auras peut-être (?) du mal à la faire réparer...</hs>
-
Le pneu Tesla d'origine est un 16" de diamètre extérieur et 2,125" de largeur. Sur cette jante, quand on monte un pneu de 2,5" de large, il est d'usage de parler de pneu de 17 pouces, ce qui est logique vis à vis de l'augmentation de diamètre. Il est probable que le moteur de cette nouvelle roue est mécaniquement équivalent à celui de la Tesla. Mais espérons qu'ils ont pensé à renforcer l'axe...
-
Oui, un voltmètre intégré dans la roue, c'est génial, c'est plus pratique que les rangées de led peu précises et cela va obliger tout le monde à faire un peu de technique. Mais j'ai des doutes concernant la vitesse, et il faudrait tourner l'afficheur à 180°... Un smarties de plus, c'est la forme à la mode, il faut s'y faire, GW abandonne (momentanément ?) les camions. Visuellement symétrique, même les pédales et les pads, cela évite d'avoir à fabriquer/gérer des pièces gauches et droites. Par contre, la roue n'est pas réversible, il y a un avant et un arrière. Un trolley arrondi bien intégré, un portage qui est bien géré, c'est tout bon. Un large cercle de leds de chaque côté, c'est pas très discret, mais ce sera probablement programmable, donc pourquoi pas. Evidemment, la partie sous la pédale est très exposée, il va y avoir de la casse ... (les possesseurs de gt16 et z10 sont au courant). On peut se demander comment on accède à la valve... Cette vénérable ancêtre a inspiré tout le monde. J'imagine (?) que GW change de politique en mettant la carte mère horizontalement (6 mosfets?), ce qui symétrise les packs de batterie, par contre il est à craindre que les versions 650 et 800 Wh soient équipées que d'un seul pack, d'où un balourd latéral... à voir. Une 17" permet une coque compacte (vs ks18L) , et le look soigné la situe plutôt dans la gamme des grosses citadines. Les fans de GW seront probablement déçus, c'est un changement radical difficile à digérer, mais c'est peut-être une stratégie pour couler Inmotion qui a bien du mal à satisfaire ses clients.
-
Excellente nouvelle. Merci. Je ne peux pas dire que j'apprécie l'immobilisme des importateurs/vendeurs français...
-
Je tiens quand même à signaler, très amicalement que l'on n'est pas "obligé" de vivre ou même travailler à Paris quand on n'aime pas ça. Paris, c'est une concentration terrible (+ de 21000 habitants au km2 ) avec un bruit énorme (oui, impossible d'entendre une roue), et cela accroît les comportements antisociaux. Il y a longtemps que j'ai compris ça, et je n'y séjourne que de manière homéopathique.
-
Pendant des mois j'ai trimbalé ma ks16 dans les magasins, la poignée télescopique est pratique pour ça. Mais depuis + de 2 ans je roule avec la ks18 plutôt encombrante, et donc je renonce à me prendre la tête. J'ai acheté des antivols à câble ici et j'utilise celui à code (les antivols vendus individuellement ont un câble trop raide, surdimensionné) et la roue reste dehors, attachée, appuyée contre un mur. A mon avis il faut régler son niveau de paranoïa en fonction de l'environnement. J'habite un bled plutôt calme, avec beaucoup moins de 1 wheeler au km carré, à la limite les passants ne savent pas ce que c'est. Quand je vais à Carrefour aux Ulis, pareil, c'est dehors dans la zone pour vélo, bien en évidence, malgré que cette commune soit, disons, plus cosmopolite. Mais je pense que pour Paris, cette démarche est assez risquée... Mais ça tombe bien, je n'y mets pas souvent mon pneu.
-
On trouve facilement des pinces à cintrer les tubes de freins ou de carburant, mais c'est du cuivre Diamètre 4,76 mm que l'on cambre rarement avec un rayon inférieur à 10 mm. Là, c'est un tube court 1/4" = 6,35 mm en laiton (donc plus raide), avec un filetage pour le bouchon... J'ai peur que tu ne puisses pas trouver ce genre d'outil dans le commerce...



