Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
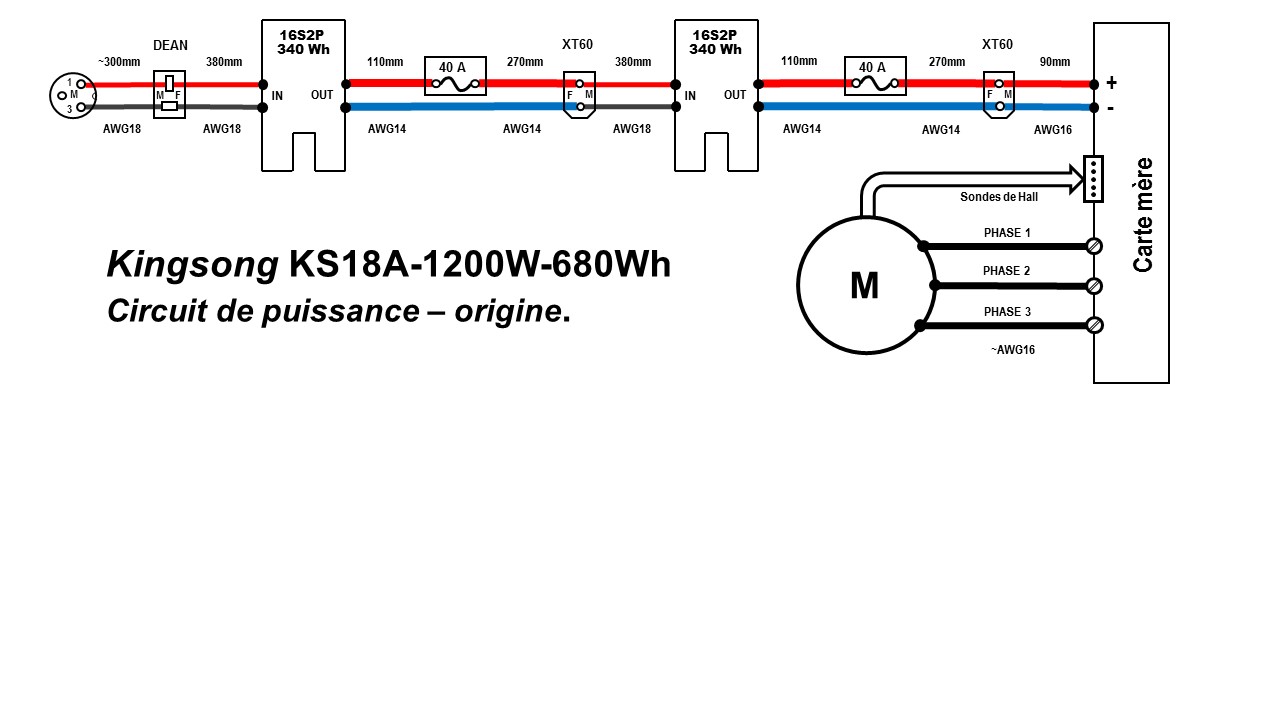
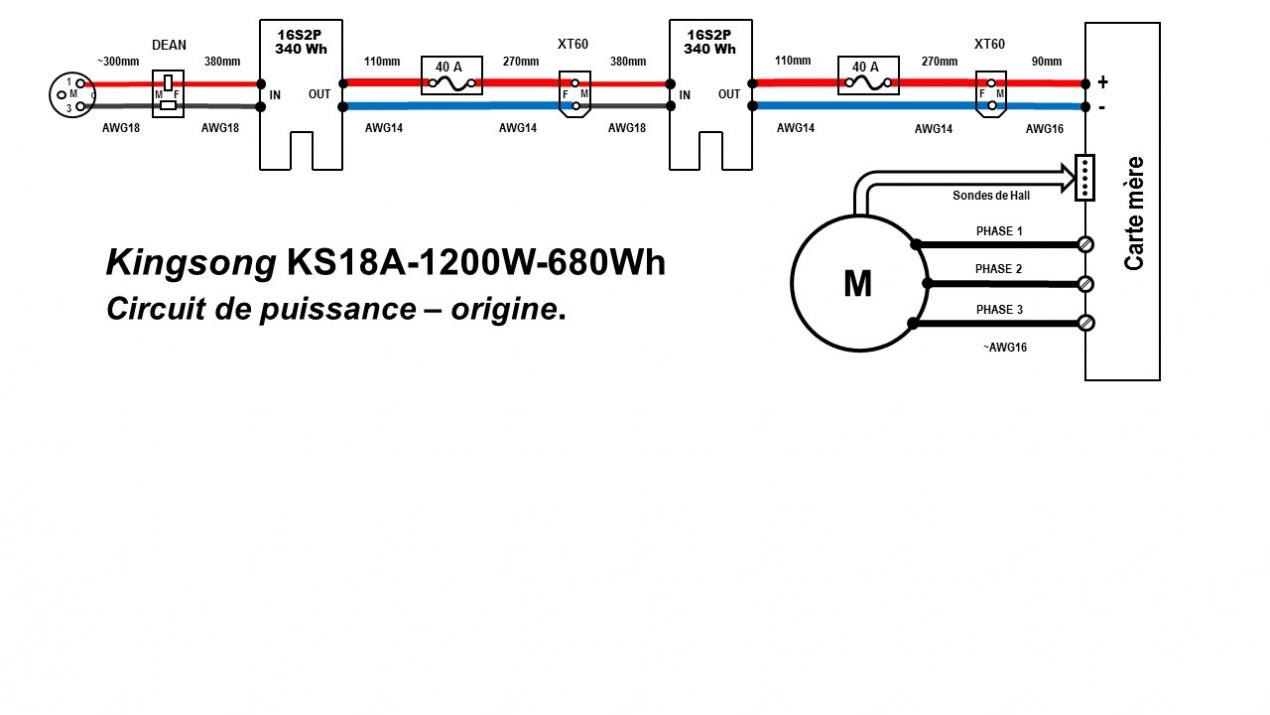
Sur la ks16b et la ks18a-680 les packs ne sont ni en série, ni en parallèle, ils sont "a a a la queue leu-leu", c'est à dire qu'on charge une batterie qui charge à son tour une autre batterie qui alimente la cm. Voilà le schéma que j'ai relevé dans ma ks18a (avant modif), la ks16b est presque pareil, sauf que le fusible est sur la cm. Les roues ks16s et ks18s ont des packs en parallèle. Edit : j'utilise plutôt le terme "en cascade", je ne sais pas s'il y a une dénomination officielle. Mais il ne faut surtout pas parler de montage en série, c'est une erreur.
-
@Hirsute , tu oublies (volontairement ?) une caractéristique très importante : la taille de la batterie. Urban360 annonce 640 Wh et 920 Wh pour les modèles V10 et V10F. Est-ce que cela signifie que Urban est allé trop loin, et que tu réprouves cette annonce, pourtant bien naturelle ? Note : ma question n'est absolument pas agressive, j'ai beaucoup d'estime pour notre acrobate préféré...
-
A peu près, oui, sur une ks16b de 18 mois. Mais c'était environ 75%, c'est à dire 63 Volts. Sur le pack 16S, en fin de charge, 15 cellules à 4,2V et une à 0,00V. Donc on peut penser que tu as 2 cellules mortes, mais ce qui m'inquiète c'est que je crois que les 2 packs de l'acm sont en // alors que dans la ks ils sont en cascade... Mais il est possible aussi que ce soit le chargeur qui cafouille. A vérifier en testant au voltmètre, au CD2, ou en changeant de chargeur.
-
Des roues d'occasion reconditionnées, c'est une bonne idée. Mais pour la ks18a, une précision s'impose car elle a subi un lifting sérieux mais sans changer de nom. Donc est-ce la version avec carte mère ventilée, ou pas... merci.
-
<HS> A ce propos, je regrette infiniment que 1radwerkstatt ait abandonné la fabrication des pédales longues </HS>


-
Même si c'est un rendu CAO, on peut se dire que si le projeteur s'est cassé la nénette à créer cette sculpture de pneumatique, c'est qu'il est relativement sûr de lui. Et justement, ce n'est pas, à ma connaissance, une sculpture classique pour roue électrique. mais plutôt un pneumatique pour scooter, dont les dimensions seraient définies par le diamètre de la jante, et pas par le diamètre externe. Je persiste à croire que cette roue s'inspire de la Z6/8/10 (ils sont trop bavards chez Ninebot !), avec moult gomme au sol...
-
Il n'y a plus d'importateur, et a priori plus de sav hors et sous garantie... Il faudra probablement commencer par remettre une structure en place, ou bien acheter directement à la source...
-
Même les hp sur la tranche fait penser à une coque large, pouvant accueillir aisément un pneu large. Ce serait conforme à l'architecture InMotion qui met sa batterie en forme de croissant au-dessus de la roue. Ainsi, on peut imaginer les cellules en deux couches bout-à-bout (il faut 135 mm), ce qui ne serait pas monstrueux.
-
Quand je vois les proportions du pneumatique, il me semble bien large pour un 16", ce n'est peut-être pas le 2.125" habituel, mais plutôt un 2.5". En conséquence, on peut considérer que c'est l'équivalent d'une 17", ce qui serait une excellente idée. Quand on voit ce que donne une ks16 avec un pneu de 2.5", cela inspire le respect. Juste une hypothèse.
-
J'utilise cette pompe depuis que @Olbom l'a signalée ici , voilà ce que j'en pense. -- le compresseur : bruyant, il fait parfaitement le job, la pression est bien étalonnée ( différence de moins de 0,1 Bar par rapport à un manomètre à colonne de mercure ) , la programmation fonctionne bien et le gonflage s'arrête un tout petit peu au delà de la valeur programmée. L'autonomie convient pour les cycles (pas pour les voitures), je n'ai jamais vidé la batterie. -- le raccord : à moitié souple et rigide, c'est une bonne idée. Attention : il ne comporte pas de valve interne (contrairement aux prolongateurs pour roues électriques), il faut impérativement que ce raccord soit vissé sur la pompe avant de le connecter à la roue. L'extrémité gainée de plastique noir tourne librement (mettre une goutte d'huile) et se visse sur la valve, et il faut visser/dévisser vite pour limiter la fuite d'air. Cette pompe, avec ses accessoires de base est pratique, elle me plait, je la recommande. Il faut être réaliste, si on veut de la précision de gonflage, aucun raccord de valve standard ne convient, les moins mauvais sont les raccords à levier des pompistes. La précision ne peut s'obtenir qu'avec des outils sérieux (double joint spi, voir 6 posts au dessus), pas avec des machins à 2€, qui d'ailleurs sont bien suffisants pour un pneu de bagnole, mais pas pour un amortisseur de VTT par exemple.
-
Il existe des adaptateurs très précis pour valves Schrader dont le vissage et l'ouverture de l'obus ont des commandes séparées. Par exemple : Oui, ça coûte un bras...

-

RANDO EROUE du 11 mars : la GOTWAY MCM5 s'invite à la Fête
Techos78 a répondu à un(e) sujet de Eroue dans Sorties et Randos
Merci @alricha , faire une vidéo est un gros boulot, avant puis après. Juste une toute petite remarque : il ne faut pas abuser des fondus floutés, à mon avis des coupures nettes ça suffit, on est habitué aux pubs avec 20 coupures sèches en 10 secondes...- 72 réponses
-
- 3
-

-

-

-
- rando eroue
- gotway mcm5
- (et 1 en plus)
-
RANDO EROUE du 11 mars : la GOTWAY MCM5 s'invite à la Fête
Techos78 a répondu à un(e) sujet de Eroue dans Sorties et Randos
Oui, même la seine était juste à la bonne hauteur, pour que @Hansolo puisse faire son travelling au ras du quai... -
J'aime bien le portail qui s'ouvre vers l'extérieur ! Ils ne s'emmerdent pas à Singapour !
-
[Trottinettes électriques] Les articles de loi en vigueur
Techos78 a répondu à un(e) sujet de 0rsa dans Les lois et assurances
Depuis 1995 les plaques d'identifications des vélos n'est plus obligatoire, probablement parce que ça fait belle lurette que personne n'en met. En imposer sur les véhicules électriques n'est pas idiot (beaucoup trop de délits de fuite..etc.), un revirement à 180° manquerait terriblement de dignité. Edit : (administration girouette ?) -
Arrêtez de nous prendre la tête avec vos blessures, c'est hors sujet. Merci.
- 4376 réponses
-
- 4
-
-

-
- que machina ?
- ninebot
- (et 4 en plus)
-
Bien vu InMotion. Il est clair qu'avec 920 Wh on peut commencer à envisager des randonnées sympathiques... L'autonomie est un souci permanent... https://store.urban360.com/produit/inmotion-v10-gyroroue/
-
J'ai déjà expliqué que les packs génériques ont presque toujours une limitation de courant de sortie constitués par plusieurs mosfets en //... Va voir sur le site Hobby16 ici pourquoi cette protection est dangereuse sur une roue : (2 raisons) si une seule cellule descend sous 2,6V : coupure pack et faceplant. (fonction over-discharge) si trop d'appel de courant : coupure pack et faceplant. (protection contre les sur-intensités) Bon, j'ai regardé rapidement les specs de ton futur pack. Il a les bonnes dimensions, il a une protection contre les sur-intensités et le courant max permanent de sortie est 15 Ampères, ce qui est faiblard pour alimenter correctement la cm (il faut au moins 40 A crête). Donc soit tu fais la modif décrite par Hobby16, soit tu mets ce pack devant, et il faudra faire comme pour une roue Gotway : charger en branchant d'abord le secteur avant la roue pour limiter l'étincelle sur le connecteur rond. Voilà, yapuka. Par d'inquiétude, ça va le faire.
-
Il faut s'entraîner sur des routes "tôle ondulée". Une des clés du problème : la symétrie pied/jambe/corps. A vitesse moyenne, l'effet gyro de la roue transforme les petits mouvements verticaux en rotation en cap à cause à cause de la différence de raideur et de pression sur les pédales. Oui, il ne faut pas qu'une oscillation verticale crée une rotation de la cheville. Pied à plat, toujours, surtout en descendant un trottoir. Oui, on peut difficilement contrôler les mouvements parasites consciemment, à mon avis il faudrait une bande passante de 10 ou 20 Hertz, notre esprit n'est pas assez rapide. Il faut que ce soient nos fonctions automatiques qui s'ajustent, par apprentissage. On peut cependant resserrer la roue dans les portions difficiles ce qui limite l'amplitude du lacet. Mais une roue n'est jamais parfaitement stable, il faut accepter de la laisser "vivre sa vie", c'est un compromis. Et il faut arriver à se décontracter. L'appréhension du débutant crée des mouvements parasites incontrôlables, par exemple certaines personnes ont les mollets qui vibrent quand ils montent sur une échelle. Rester cool et fluide, facile à dire, hein ?
-
Bien vu, il y a effectivement le cas où un pack générique aurait une limitation de courant un peu faible, et si on ne veut pas inhiber les mosfets par strap on peut le mettre devant. Diode anti-retour oui/non et limitation oui/non conduisent a des dispositions contradictoires, Je ne peux pas trancher. Je peux te dire ce que j'ai fait sur ma ks18-680 pour la passer en 1520 Wh : j'ai mis le pack générique 840 en tête (sans modifier la limitation), avec 2 diodes schottky 4 A externes, puis les deux packs d'origines 340+340 branchés en //. C'est une décision discutable, mais ça marche. Honnêtement, avoir 2 batteries en // pour alimenter la carte mère, je n'ai pas senti de différence. Mais presque 4 kg de plus en haut, oui, ça se sent bien.
-
Tsss, T1000 l'inoxydable est bien moqueur... Pour le vectoriel c'est mal barré, sous OruxMaps 7.2.7 (le dernier), mes blocs de tuiles IGN (la France entière pèse 4 Go) sont transformés en salmigondis inexploitable. Le format est de l'img Garmin, déplombé/découpé avec des utilitaires bidouillesques, et le résultat ne marche... que sur Garmin. Tant pis. Mais j'admets que les cartes multicouches ne sont pas mal du tout, (les osm...) et il "suffit" de sélectionner les zooms pertinents. Euh, oui, le sujet était Relive
-
Merci pour la réponse. Pour moi qui suis réfractaire au gsm, (donc on-line exclus), je vais regarder OruxMaps + MOBAC qui semblent correspondre à mes "besoins", même si j'ai surtout vu des cartes multicouches (zoom), alors que j'ai une petite préférence pour le vectoriel (même si les maisons ne sont pas toujours bien rectangulaires à cause de la résolution...). Et la gratuité est sympathique, ainsi que la non-inscription à un tagada-store...
-
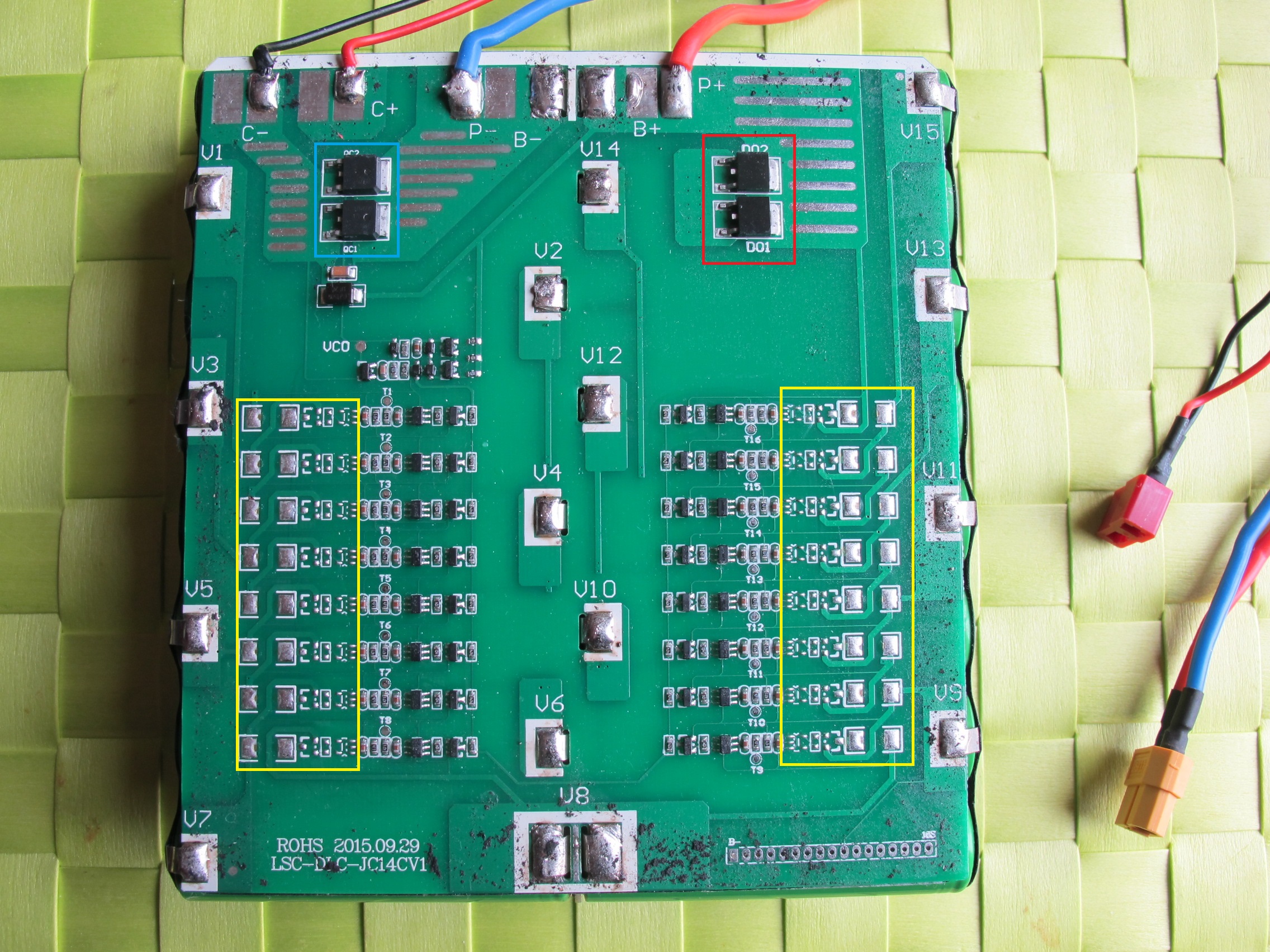
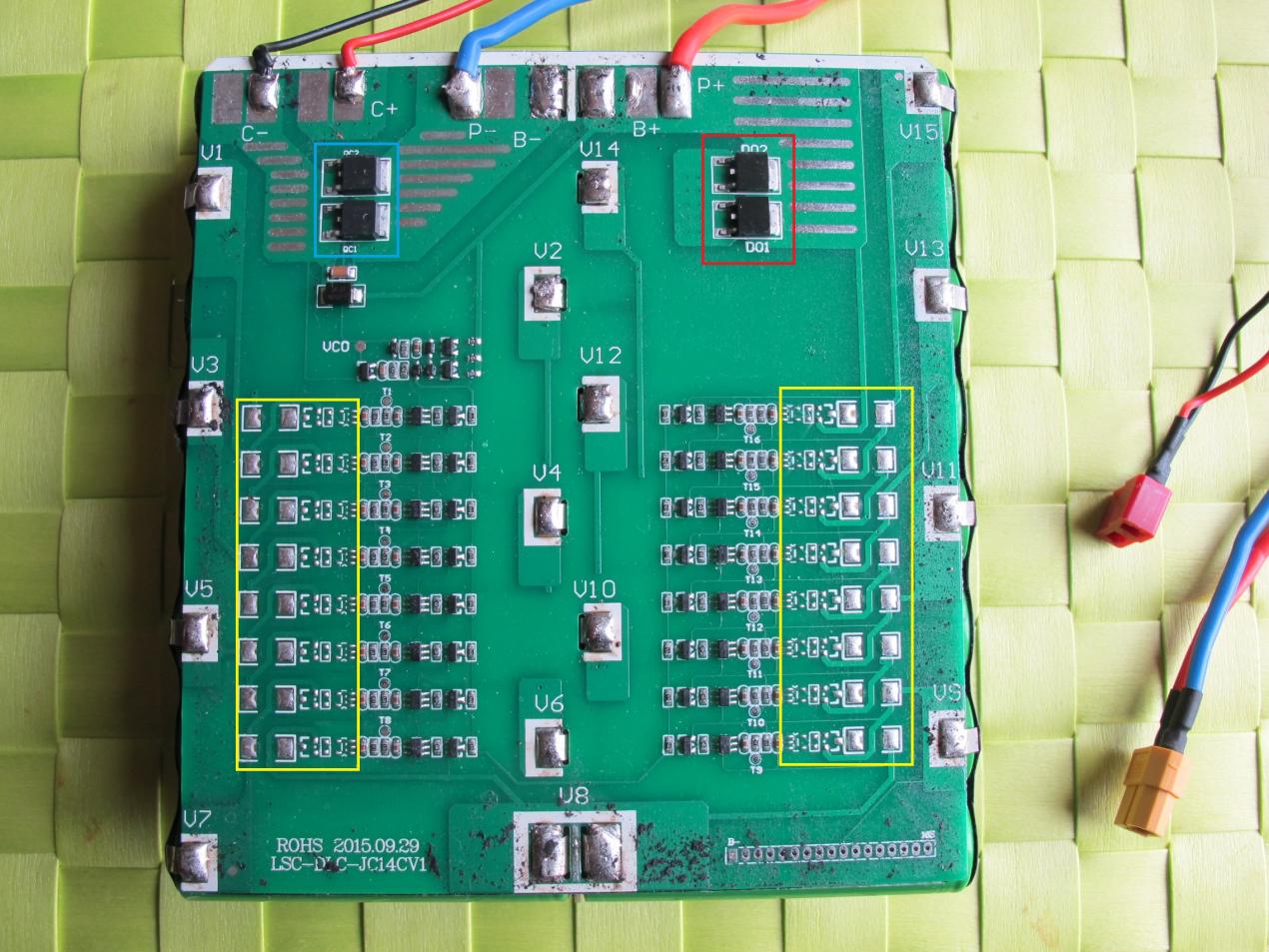
salut @rik27 , pour plus de rigueur, je suggère d'abord d'éviter de parler de branchement en série, mais plutôt, par exemple, de branchement en cascade. Mais tu as bien saisi le truc, c'est effectivement un choix cornélien. Le branchement en cascade est le plus simple à réaliser, il faut simplement souder les bons connecteurs sans se soucier du raccordement en Y de la charge et de la puissance. Mais même comme ça, il faut que les tensions des batteries soient proches (mieux que 1 volt) avant de les connecter ensemble Pour info, voilà le câblage d'origine de la ks18a-680, la ks16 a 1 seul fusible sur la carte mère, c'est plus simple. Les 2 packs ont donc des connecteurs différents. C'est mieux de mettre le pack KS d'origine côté port de charge pour bénéficier de la diode anti-retour du bms. A la limite, c'est aussi mieux si le second pack n'a pas cette diode pour récupérer de la charge lors des décélérations. L'équipement d'origine d'un pack 420 Wh pour ks16b : rectangles jaunes : pas de composants d'équilibrage rectangle rouge : deux excellentes diodes schottky en // pour l'anti-retour de protection du port de charge rectangle bleu : deux mosfets en // pour couper la charge quand la 1ière cellule atteint 4,2 V pas de limitation de courant de sortie (des gros mosfets en //), c'est la carte mère qui gère le courant, avec en plus une sécurité par fusible pas de fil auxiliaire pour transmettre la détection de tension basse de chaque cellule, c'est la carte mère qui gère la tension basse mais seulement pour l'ensemble 16s. D'où une panne non détectée quand une cellule est à tombée à 0.
-
Ça c'est une photo de @sbouju, qui a placé une batterie de l'autre côté, il me semble que les demi coques sont identiques, donc d'origine la roue est équilibrée avec 2 packs 340 Wh en quinconce, et légèrement déséquilibrée avec le pack 170 Wh (~1 kg) en plus dans l'alvéole dispo (1 seule cm bien sûr). Mais pas la batterie allemande 1radwerkstatt (sur la pédale) qui est trop épaisse et qui n'a bizarrement que 2 fils.
-
Personne n'a parlé de Oruxmaps, qui semble avoir bien évolué depuis la béta. C'est naze ou pas ? (pour utilisation offline sur tablette Android)...