



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
-
Hi. Le sigle WTF a plusieurs significations, je suppose que tu veux dire ""merdique". Hypothèse : je ne pense pas que la ks se donne la peine de calculer la puissance, j'imagine que c'est Gyrométrics qui plante en faisant le produit U*I à cause d'un problème de format ou de confusion de données. Il y a aussi un piège dans la mesure de courant négatif avec la ks16s, le signe est inhibé ou non selon la version de Gyrometrics, une valeur négative interprétée non signée correspond à une valeur énorme (le signe est le bit de poids fort).
-
Cette image donne une idée du câblage que nécessite un vélo électrique ( Aliexpress) ) Il faut bien sûr ajouter la batterie et le moteur, assurer la démontabilité (facile et étanche) du moteur quand il est au centre d'une roue... Un gros boulot !. Il serait intéressant d'avoir la documentation de ces contrôleurs pour savoir comment ils se configurent... A la manière des PC génériques, il semble que les chinois aient tendance à standardiser les périphériques, ce qui facilite la maintenance, contrairement aux vélos de marque dont l'équipement est propriétaire.

-
Le compte est bon, avec 7 A et des poussières, on a 350 W sous 48 V. . Bon, effectivement ce n'est pas énorme, mais ce n'est qu'une aide au pédalage, d'ailleurs il faut maintenir la pression sur les pédales à cause des capteurs d'effort...
-
C'est la puissance du moteur associé à la tension batterie qui définit les performances maximales. C'est une limitation logicielle du contrôleur qui applique la limitation à 250W, lors de l'opération de localisation, appliquée par l'importateur ou le revendeur, mais pas par l'usine et probablement pas par l'exportateur. Il me semble qu'il y a de grandes chances que ce vélo arrive en 350W natif. Le logiciel peut être modifié par l'importateur ou le revendeur grâce à une procédure particulière. J'ai eu l'occasion de demander ça à un revendeur, pour booster un vélo trop "mou", non pas pour la vitesse maxi, mais pour la loi de répartition du couple qui est ajustable. Probablement qu'il est difficile de savoir comment devenir "administrateur" du logiciel du vae mais peut-être que c'est une bête séquence de touches... Et il faut avoir la liste et l'usage des paramètres... Vraiment pas simple. Ceci dit, pour une utilisation sur terrain privé on peut avoir envie d'un vélo non bridé, et peut-être qu'on peut tenter d'avoir les renseignements. La puissance est difficile à contrôler, par contre la vitesse maxi peut être facilement vérifiée, l'exportateur indique simplement vitesse < 30 km/h, @Stanor pourra nous dire si le moteur passe effectivement en roue libre à 26 km/h... patience.
-
Ah d'accord, mais quand on roule, le U, on le met où ? Je pinaille, je pinaille, entre les dents bien sûr. Désolé pour tes bobos, les douleurs du poignet sont partagées aussi par les adolescents, pour des raisons que je ne détaillerai pas ici
-
-
Ma femme d'abord eu un KTM électrique, cadre ouvert, batterie sur le porte bagage, moteur arrière. Très bonne efficacité en montée, tenue de route médiocre à cause du cadre trop souple et du poids des batteries à l'arrière. Elle a actuellement un Kalkhoff cadre ouvert, batterie derrière le tube de selle, moteur au pédalier. L'efficacité du moteur est moins bonne mais la tenue de route nettement supérieure. Cette courte expérience entre deux vélos de même catégorie (~2500€, autonomie ~100km) montre : le moteur arrière peut se montrer plus efficace que le moteur au pédalier; la batterie sous le porte bagage est une mauvaise idée et il faut arriver à convaincre sa femme qu'un cadre ouvert est une conn déraisonnable, moi je n'y suis pas arrivé Détails techno : les freins hydrauliques sont super, le tube de selle suspendu très agréable, le mode régénération (ktm) quasi inutile, les vitesses (7) intégrées au moyeu (Kalkhoff) sont pratiques. @sbouju , je ne connaissait pas ce Matra, l'emplacement des batteries est vraiment idéal, et on se demande ce que c'est ce zigouigoui dans le prolongement du tube de selle... Matra a fait des vélos franchement moche à certaines époques, mais là, difficile de trouver à redire. Le diamètre monstrueux du moteur est de bon augure. Je suis toujours bluffé par les disques de frein, je me demande si ils pensent à laisser un peu de matière autour des trous... @Stanor , euh, 350 W c'est pas un peu beaucoup pour notre législation ? Mais chuuuttt...
-
@Yuili79290 , ta rando a été à une allure vraiment très soutenue, 3 heures à 24 km/h, ça décoiffe. C'était probablement plus de la route que du chemin... Cela semble confirmer que cette MS3 74 Volts est plutôt gourmande, et j'ai déjà entendu les rafales de bips de cet engin en fin de parcours L'expérience montre que les ks18 (60 V) avec leur petit moteur 1200 W est plus économique, je fais presque 100 km avec 1520 Wh mais un peu en dessous de 20 km/h de moyenne. Par contre, la MS3 est très pêchue, les accélérations sont impressionnantes. C'est une question qui a déjà été posée : est-ce que le 74 V est pertinent ou utile ?.
-
Bonjour à tous, Gyroroues et trottinettes c'est chouettes, mais rien ne nous empêche de parler un peu de vélos électriques... OK, ce n'est pas franchement la vocation de ce forum, mais il ne faut pas être sectaires. J'ouvre donc ce sujet très général, et c'est surtout à cause de @Stanor qui nous a jeté à la figure cette superbe photo : aliexpress roues 24" , deux tailles de cadre, batterie 576 Wh ou 720 Wh Belle bête, n'est-ce pas ? Y a-t-il quelqu'un qui aurait honte de monter là-dessus ? C'est un pliant grande roues, hop dans le coffre, plutôt sympa, non ? Si il le veut @Stanor pourra nous en parler quand il l'aura reçu (ou même avant...) Perso, je suis un peu jaloux, là Éternel problème, soit on achète ici et on peut le voir et l'essayer (par exemple chez freemoos ...), soit on l’achète en chine et c'est l’aventure. Soyons clair, le vélo parfait n'existe pas, et les usages en sont différents. Le modèle ci-dessus semble assez polyvalent route-chemin. (vtc) Mais a priori pas pour un usage vtt, la batterie haute dans une sacoche, le cadre articulé posent problème, en conséquence le petit plateau ne sert probablement à rien, même pour éviter de vriller la chaîne. Le cadre mono-poutre est classique en ebike pliable, il n'inspire pas de crainte, mais l'articulation au niveau du pédalier devra être parfaite... Vous en pensez quoi ? Vous êtes déjà équipé ?
-
Effectivement @GyroKoo , voilà un générateur autonome très sérieux, y compris dans les spécifications qui définissent clairement la capacité des batteries internes : 1428 Wh. Le rechargement secteur de cet onduleur dure 25 heures, cela semble un peu long, mais ce n'est pas un gros inconvénient pour une utilisation à domicile pour gérer des panneaux solaires. Par contre, cet onduleur ne semble pas capable de se synchroniser sur le secteur pour renvoyer l'énergie au réseau, il ne convient que pour les petites installations autonomes.
-
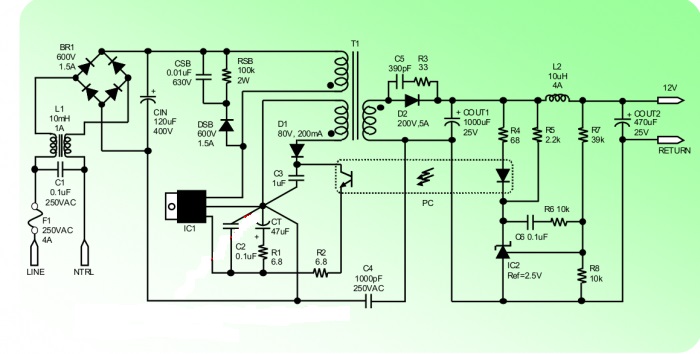
Passer par un onduleur n'est pas une obligation. Les chargeurs standards sont à découpage direct du secteur, le premier étage consiste en un redressement/filtrage, voilà un exemple : Cela veut dire que l'on peut alimenter les chargeurs directement en courant continu, d'une tension équivalente à celle d'un secteur 110V--240V redressé. Et on peut brancher dans n'importe quel sens, seules 2 diodes du pont seront sollicitées. On peut donc, par exemple, utiliser 4 packs 60 V en série, par exemple pour avoir 800 Wh, ceux-ci : https://fr.aliexpress.com/store/product/Dedicated-power-supply-import-batteries-Electric-unicycle-lithium-battery-pack-60-v-electric-balance-car-battery/1748730_32753076663.html?spm=a2g0w.12010608.0.0.7276c27cZ3qh6Q Selon le niveau de charge de ces batteries externes, la tension variera de 270 V à 200 VDC, ce qui va bien pour tous les chargeurs 110-240VAC. Il faut recharger ces batteries externes séparément, et s'arranger pour qu'elles soient à peu près équilibrées. Des batteries dont on n'a pas strappé la protection de courant de sortie (plusieurs mosfets et //) ont donc en principe une protection de tension basse toujours fonctionnelle, c'est important. C'est juste une idée. Edit : les chargeurs ont tous une isolation galvanique entre l'entrée et la sortie, grâce à l'utilisation d'un transformateur, la rétro-régulation de tension/courant passe par un photo-coupleur, et un petit condensateur se charge des perturbations HF générées par le découpage. Il n'y a donc pas de danger pour la roue qui n'est pas en contact direct avec la tension d'entrée.
-
Une annonce fracassante ici : https://www.espritroue.fr/topic/3919-astuce-batterie-externe-pour-charger-e-twow-s2-et-autres-machines/ Bizarre, @shyke n'est pas venu confirmer sa découverte miraculeuse, c'est bien dommage... Bof, 75 Ah sous 3,7 Volts, ça fait 277 Wh --> environ 200 Wh utiles... (rendement onduleur et chargeur) Edit : j'espère que personne ne confond les Coulombs (quantité d'électricité) et les Joules (énergie). On utilise aussi les Ah et les Wh. Entre les deux, il faut faire intervenir la tension... A la limite, il faut regarder le poids du truc. Eh bien non, 2,8 kg tout compris ce n'est pas assez pour recharger une roue.
-
Oui, j'ai vu cet engin, et j'ai eu du mal à l'identifier Heureusement, il y a les pédales très typiques, ça aide ! Dans notre rando 18", cette gt16 fait toute rikiki, mais elle est diablement efficace. Surtout entre les pattes de @sbouju , un véritable intrépide qui monte les grosses pentes boueuses avec le sourire... Perso, je me dégonfle, pffff.
-
Il est possible qu'on décroche un jour le droit d'accès aux pistes et bandes cyclables, à 25 km/h, en plus de l'accès aux trottoirs à 6 km/h. Mais il va bien y avoir dans le tas un fonctionnaire qui va dire : " limitation de la puissance à 250 Watts, comme les vae" , et là, ça va pas le faire...
-
Merci pour les photos détaillées, effectivement les deux modèles sont très différents. Et si un jour tu veux revenir à un faisceau large, tu as ce qu'il faut. Bonne manipe.
-
Ayant eu l'occasion de l'apercevoir, je confirme le très bon rendu cartographique de Locus. C'est tellement beau qu'on a presque envie d'emporter une tablette 10"... (moins encombrante qu'une carte Michelin)
-
Ce site est impressionnant : c'est un chinois qui a le sens des affaires : vendre 1 rondelle de pédale à 4,32€ (frais d'envoi 18€), ben dis donc... Le prix du kilo d'inox est compris entre 0,8 et 1,5€. Bref. J'essaye de comprendre. En fait, tu n'as pas changé la puissance de la lampe, mais uniquement changé sa concentration lumineuse. La led et le corps de lampe sont toujours les mêmes : On peut choisir deux réflecteurs possibles, et le verre de rechange : Donc tu as préféré commander une lampe complète, en indiquant en commentaire que c'était pour une Tesla, et donc tu as reçu un ensemble équipé du réflecteur MODEL 2. C'est ça ? Oui, mais comme je suis moins diplomate que @koto , moi je dis que la situation en France est lamentable. on a des importateurs (GW, KS...) qui font valoir un "droit d'exclusivité" de manière musclée, mais qui ne s'occupent que très très partiellement des pièces détachées, avec le leitmotiv : "venez donc voir notre sav"...


-
Vu, OK, 14h30, mais ce n'est toujours pas sûr, mais ça ne dépend pas de moi (Aaahhh, la famille !).
-
Salut à tous, ce matin, quelques plaques de verglas (ça fait travailler les sphincters) qui devraient disparaître cet aprem'. Parking côté gare tgv je suppose, parce qu'il y a des parkings un peu partout y compris des silos de l'autre côté des passerelles. C'est pas impossible que je vienne... ne m'attendez pas, c'est pas sûr. Cdt
-
La notion de batterie externe est séduisante, mais je rappelle qu'il faut choisir soigneusement la stratégie de câblage, toute erreur se traduisant par des destructions de type "feu de bengale". Je ne parle pas simplement du dimensionnement des interconnexions, mais de la gestion séparée ou commune des 2 batteries.
-
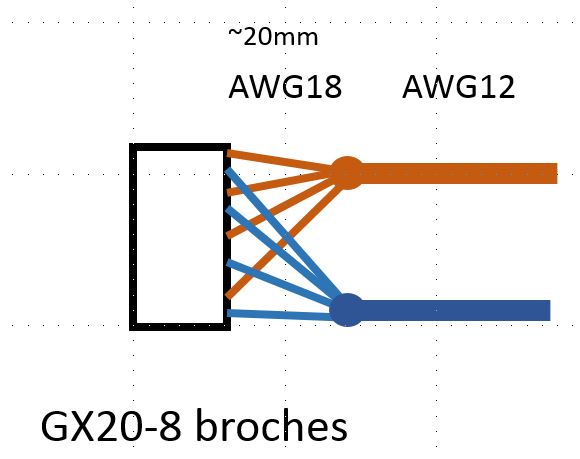
Pour rester dans la techno GX, et passer 27 A, j'ai tendance à penser à un GX20 8 broches, avec contacts 5/7A, avec 2 fois 4 broches en //. Pour éviter les contraintes mécaniques au niveau des broches, il faut qu'elles restent indépendantes (donc pas de paquet de soudure), ce qui conduit à faire une épissure externe, comme ça : Simple hypothèse...
-
Ne pas oublier les vae speed, qui sont qualifiés pour rouler à 45 km/h et portent une plaque :

-
Sur un GX12, la partie noire (l'isolant) fait 9 mm de diamètre.c'est le corps vissable de l'embase (le connecteur fixe, mâle) qui fait 12, la bague vissable de verrouillage fait 13 de diamètre. Si la partie noire fait 12,5 de D., c'est un GX16 :
-
Merci @grogadin , je sais cela. Ce que j'essaye d'exprimer (de manière trop concise), c'est que la possession de la plaque n'est pas la cause de l'interdiction, mais la conséquence de la non conformité d'un certain nombre de critères plus ou moins objectifs, compliquée par la nouveauté des engins. Cette distinction cause --> conséquence me semble importante, parler uniquement des conséquences permet d'escamoter toutes les causes, ce qui est une démarche trop rapide et facile, et très reposant pour beaucoup de personnes... (pas d'équivoque, je ne parle pas pour toi @grogadin , car tu as évoqué une cause et c'est ce que je préfère) C'est une critique du reportage lui-même, sans volonté de recommencer tous ces débats technico-législatifs qui occupent de nombreux topics.



