



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
Absolument, merci. La discussion a été élargie à l'update firmware, mais là, appli et fw sont tellement liés qu'il est difficile de faire autrement. Yes, and KS must warn all his clients... ASAP, I hope...
-
Un compte gmail , je ne sais pas ce que c'est et je ne veux pas le savoir... J'ai acheté sur catalogue une roue en précommande (personne n'avait encore vu la ks16b), associée à un service permettant de corriger les bugs de jeunesse à l'aide d'une application installable librement (sans s'inscrire à tagada-store) et disposant d'une liaison wi-fi. Ce service n'est pas limité dans le temps, mais par défaut on peut considérer qu'il reste valide pour la durée de la garantie ou plutôt la durée de diffusion du modèle. C'est ça que j'ai acheté, rien d'autre. Il n'est pas question que je mette un doigt de pied dans un réseau social quel qu'il soit. Si vraiment Kingsong, via les revendeurs, veut connaître mon profil, ils peuvent m'interroger par courrier ou par mail, mais... il est peu probable que je réponde. En préliminaire, il faut impérativement que le réseau KS communique clairement sur son changement de méthode d'upgrage firmware. Il est indispensable que TOUS les clients soient mis au courant, par mail et/ou courrier, les forums sont utiles aussi mais ils ne sont pas exhaustifs. En absence d'alarme officielle, il y a tromperie commerciale : les anciens outils logiciels disent "pas de nouvelle version" alors que c'est faux. Ensuite, je vois 2 solutions : -- utilisation de la nouvelle appli, mais comme on ne peut pas obliger un client intègre à mentir, il faut définir officiellement tous les renseignements bidons qu'il faut saisir. -- utilisation de l'appli des sav+boutiques, qui permet de charger n'importe quel firmware, et fourniture récurrente dudit firmware.
-
Important : cela se confirme, les anciennes applis n'assurent plus l'évolution du firmware, seule cette nouvelle appli le fait. La sélection et diffusion des fw se servait de l'adresse http://apkdomain.duapp.com/kingsong/versions.json , et pour la KS16B la dernière version est la 1.25 : "KS-16B","versionName":"1.10","versionCode":"125","app_url":"http://apkdomain.duapp.com/kingsong/16B.bin","des_ch":"_en":"Note:\nBefore upgrading, pls do check the basic info and bear the firmware version into mind, pls don’t exit upgrading interface while upgrading. Restart the unicycle after upgrading.\nPrevious version:\nV1.25 Solved crash issue when turn off unicycle;RGB color and mode can be adjusted;Turning off unicycle through app\ Si il existe une nouvelle version 1.26 pour la KS16B, c'est que le système a changé, en loucedé. Donc, si j'ai bien compris, si on veut être à jour, il faudra désormais s'identifier, donner son n° de téléphone, de carte bancaire, sa religion, sa couleur de peau, ses préférences politiques etc... Si j'étais vulgaire je dirais Raaahhhh les enfoirés !! , heureusement, tel n'est pas le cas, je vais donc dire : fi, comme cela est contrariant. Top chrono : on va voir combien de temps vont mettre nos importateurs/vendeurs KS pour diffuser cette nouvelle. Ceci dit, rien n'est encore absolument sûr, il faut probablement attendre avant de s'énerver.
-
-
-
Tiens, c'est curieux, est-ce que ça veut dire que KS utilise un nouveau canal de diffusion du firmware pour la KS16S ? Car sur l'ancien lien, le firmware n'existe pas : http://apkdomain.duapp.com/kingsong/versions.json
-
Plutôt jolie, non ? Je parle de la roue, bien sûr.
-
Salut @hobby16 , quand on parle d'une roue, il ne faut surtout pas parler de contact, car il n'y a pas d'interrupteur. Il y a un bouton poussoir, qui présente un état logique à l'entrée de la carte mère, et du soft qui implémente la fonction on-off intelligente, c'est à dire en tenant compte de la vitesse et de la position. La carte mère est toujours alimentée, et effectivement c'est un mode veille et non pas un mode arrêt. Les cartes mères gèrent cet état de veille plus ou moins intelligemment, en coupant si possible les fonctions inutiles et en passant en mode économique, fréquence basse sur le µcontrôleur etc... Et ce n'est pas toujours très bien fait, ce mode veille consomme plus ou moins. Ninebot semble avoir inventé un truc bizarre sur la S2 : un mode veille profonde qui nécessite un reset à froid pour redémarrer, que l'on ne peut obtenir qu'en coupant les batteries. Pas très pratique, mais cela peut préserver les batteries en cas de stockage très prolongé.
-
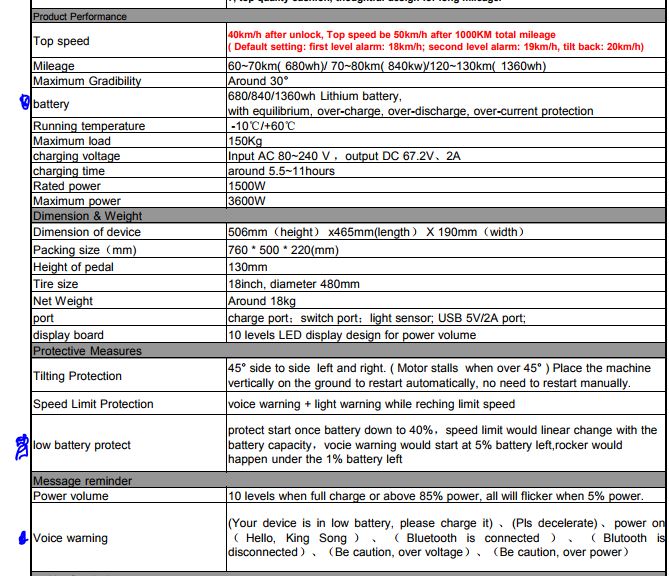
Dans les dopettes "électroniques", il y a 1 cellule, et dans les roues, il y en a 15, 16 ou 20 en série. De plus, dans les roues, on inhibe (ou on ne met pas) la limitation de courant de sortie, c'est à dire qu'il n'y a plus la rangée de mosfets de puissance pour interrompre le courant de sortie. C'est logique, on fait passer la santé du pilote avant celle des batteries. Mais cela veut dire que le bms ne peut pas gérer lui-même les sous-tensions cellule par cellule. Donc la coupure de tension basse est gérée par la carte mère, par bips, tb avec restriction de vitesse, messages verbaux. En fait, la roue se garde une marge de d'environ 15% qui est le minimum requis pour garder un équilibre statique de la roue. La carte mère mesure la tension et agit en conséquence. Mais il s'agit de la tension globale, et si une cellule descend sous le seuil critique et meurt, la carte mère n'est pas au courant (si je puis dire). Ça m'est arrivé. Heureusement, les bms récents sont plus complexes et incorporent des fonctions annexes qui nécessitent des fils auxiliaires pour équilibrer les packs entre eux et, espérons-le, détecter la sous-tension d'une cellule individuelle afin de déclencher une alarme. Par exemple, quand je regarde les specs de la ks18s ici : Je vois avec un extrême bonheur que les packs ont (enfin) la fonction d'équilibrage (ce n'est pas le cas de la ks16b), la fonction over-discharge est mentionnée et, comme les packs ont effectivement des fils supplémentaires, on peut espérer que chaque groupe de cellules (de 2 à 4 en //) est surveillé. Ce serait bien d'avoir confirmation...
-
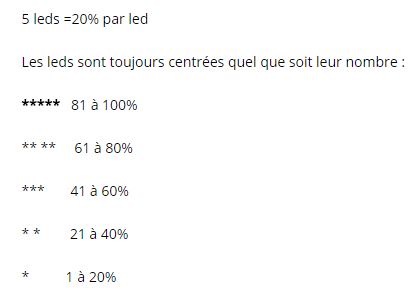
Même la lecture du niveau de batterie est compliquée :
-
Diable, je n'ai pas été assez précis, désolé. Le voyant est sur le chargeur, et s'il est déjà vert, c'est tout bon, c'est que la roue est chargée à bloc. En principe (mais je connais mal la ms3), quand tu mets la roue en marche, verticale, immobile, la rangée de led arrière donne le niveau des batteries, et donc si elles sont toutes allumées cela confirme que c'est tout bon. (il me semble). Edit : ensuite, quand tu roules, les leds indiquent le freinage, le changement de direction etc, c'est un vrai bordel , j'ai suivi hier 2 ms3 en essayant de comprendre la logique du truc, bon, euh, il me manque quelques années d'étude...
-
Salut @db77 , je me charge de la n°1, c'est la plus facile : Tu peux laisser la roue sur off quand tu charges. Avec Gotway, il faut d'abord brancher le chargeur au réseau, puis brancher la prise ronde sur le port de charge, en faisant attention au détrompeur (certains arrivent à forcer sur une mauvaise position). Sans CD2, c'est uniquement le voyant qui dit ce qui se passe : voyant rouge ça charge, voyant vert c'est fini, ou plutôt le courant qui diminue progressivement en fin de charge est passé sous un certain seuil (généralement 200mA). On peut débrancher tout de suite, ou plus tard, ou au petit matin, il n'y a pas le feu. L'ordre particulier de branchement a pour but de minimiser l'étincelle qui se produit quand on connecte le connecteur rond. Il faut savoir que le chargeur comporte en sortie un condensateur de forte valeur pour filtrer la tension. Quand le chargeur n'est pas alimenté, le condensateur est à 0 Volt, et quand on branche la roue, il se charge brutalement car chez GW il n'y a pas de diode anti-retour, et la roue présente sa tension batterie sur les broches du port de charge. Grosse étincelle. Quand on alimente d'abord le chargeur, son condensateur de sortie se charge à 67,3 V environ, et quand on branche la roue, la tension de charge redescend environ à la tension batterie + 1V , l'excursion de tension est moindre et l'étincelle plus faible.
-
Le temps et la compétence ne suffisent pas. Il faut les pièces détachées, les outils, et éventuellement quelques procédures : les pièces détachées : impossible d'approvisionner l'ensemble des pièces pour l'ensemble des roues, le panel proposé par les distributeurs / importateurs / boutiques est misérable, les constructeurs ont d'autres chats à fouetter, et les sav gardent quelques stocks, ce qui est compréhensible. De plus, il est impossible de connaître les différentes versions d'un même modèle, et on peut se retrouver avec une carte mère non compatible du moteur. Difficile de trouver mieux en terme de rétention de matériel et d'information. les outils : pour le matériel, ça va, la structure d'une roue est simple. Pour les outils logiciels, ça se complique. A mon avis, il y a deux niveaux d'intervention : les boutiques ont des outils (applis) qui permettent de réinstaller un firmware foireux, mais seuls les constructeurs peuvent gérer l'ensemble des paramètres internes, qui restent "confidentiel industrie" et qui nécessitent souvent de connecter une sonde. Le constructeur s'assure ainsi une exclusivité de fourniture, ce qui est compréhensible. Le constructeur vend le plus souvent par lot de 10 minimum, sauf accord particulier... les procédures : il faut lutter pour avoir les renseignements, heureusement qu'il y a les forums et youtube. Exemple : comment savoir, si vous changez la coque d'une KS18, qu'il faut découper les flancs à la scie sauteuse pour faire passer les batteries... Ça surprends, n'est-ce pas... En résumé, quand on achète directement en Chine, il faut accepter que dans certains cas, on ne pourra pas s'en sortir, même avec beaucoup de bonne volonté.
-
Idem. A vélo, un compteur est bien utile pour se motiver. En roue, on se laisse davantage vivre, en adaptant intuitivement sa vitesse aux circonstances... L'appli est le plus souvent utilisé en terminal de gestion plutôt qu'en tableau de bord. Mais, une appli constructeur est aussi une démonstration de savoir-faire, elle se doit d'être le mieux possible, si possible irréprochable... enfin, il me semble. Envoyé de ma Win-machine qui ne connaît même pas Tapatruc.
-
Ce cadran de cinémomètre est moche. Des wheelers qui roulent couramment à 60 km/h, ça existe ?. Mettre 3 graduations quand on compte de 5 et 5, est-ce logique ?. Existe-t-il encore sur cette planète quelqu'un qui ne sait pas que le multiplicateur par 1000 s'écrit avec un petit k , jamais avec un K majuscule ? . Est-ce que personne ne comprend qu'une couleur orange pale sur fond blanc est invisible au soleil sur la quasi totalité des écrans lcd ou oled ? J'ai mauvais caractère, n'est-ce pas Ceci dit, se contenter d'un fond uni c'est parfait, la sobriété n'est pas un défaut.
-
Non, bien sûr. Pour rouler horizontalement à vitesse moyenne, une roue consomme environ 14 Wh au kilomètre, essentiellement à cause des frottements. Quand on monte ou descend une pente, la masse de notre corps (+ roue) gagne ou perd de l'énergie potentielle de gravitation, qu'il faut prélever ou redonner aux batteries, et qui s'additionne ou se retranche aux 14 Wh ci-dessus. Bon, ce n'est pas aussi arithmétique que cela, car il faudrait tenir compte des rendements mécaniques/électriques/chimiques, les pertes (10 ou 15% ?) se retrouvent sous forme de chaleur. On peut récupérer rapidement l'énergie potentielle de gravité, par exemple en sautant dans un ravin, ainsi, au final, on obtiendra quelques modifications esthétiques sous forme de dispersion de nos constituants biologiques, ainsi que divers bruits, euh, assez glauques en fait.
-
Merci db77, je n'avais pas vu le panneau. Désolé. Mais sur leur site l'adresse est fausse : c'est 1 rue de Witten , pas 1 rue Witten. Bref. L'important est de savoir s'il y a ou non un show-room à l'intérieur de ce site...
-
Faire grimper 120 kg (roue+pilote) de 800 mètres, nécessite d'acquérir une certaine quantité d'énergie potentielle : Epp = m g (z1 - z0) = 120 * 9,81 * ( 2000 - 1200 ) = 941760 Joules / 3600 = 261 Wh La demande n'était donc pas excessive, et il est dommage que cette roue chauffe autant. 73 ° c'est énorme, on ne peut pas tenir le doigt sur un métal à 60°. C'est une chose à savoir, l'électronique chauffe, il faut en tenir compte.
-
Si j'ai bien compris, High'tems est une e-boutique qui vend au tarif des magasins... Il n'y a pas de petit profit. Même l'adresse est bizarre : 1 rue Witten Beauvais, Google Maps aiguille sur un bâtiment Toshiba dans une zone industrielle (1 rue de Witten), ou bien une maison individuelle (1 rue Witten). Je me trompe peut-être mais ils semblent assez cons à Beauvais pour donner le même nom à deux rues différentes... Et , en regardant la carte du forum, il n'y a toujours aucun wheeler dans un rayon de 50 km autour de Beauvais. Pas très glorieux tout ça.
-
@KS69 , thanks for these confirmations, performance and autonomy, "what else"... If I had this wheel, I think I would put 0,0,39,40, because 40 is a psychological barrier and I am a very very old man... which never carries protections. With the ks18a, it is rare that I exceed 35 km/h.. I'm not so furious, as you can see. @Ludow , Certes certes... Il est clair que quand le choix est bien figé, l'achat se résume à : quand, où et à quel tarif. Je vais essayer d'être méthodique, d'abord réparer la ks16b qui a une batterie en panne, ensuite ajouter une batterie dans la ks18a... Rien que ça, avec d'autre bricoles, cela va m'occuper tout l'hiver. Donc, a priori, pas avant 2018...
-
Impressionnant, merci @Ludow . De plus en plus difficile de résister à un achat compulsif... Pour le freinage, en théorie il ne devrait pas y avoir de souci, quand une roue accélère fort, elle décélère encore plus fort surtout avec 3 batteries en // qui absorbent l'énergie. Le problème vient du pilote qui a peur de se retrouver assis par terre, basculer franchement en arrière n'est pas un mouvement très naturel... Pour la tenue en cap, j'essaye de symétriser le plus possible la flexion des jambes et la pression sur les pédales, appui minimum des genoux... les courbes rapides nécessitent un apprentissage assez long, mais c'est magique, on arrive à s'y faire.
-
@djerr , cet enchaînement d'emmerdes est à peine croyable, sincèrement désolé. Si tu peux, je vais de demander un service : peux-tu me dire le poids du moteur+jante, ou bien avec en plus pneu+jante, ou bien avec pédales. Une précision de 0,5 kg me suffit, j'étudie des structures artisanales de roues et j'ai du mal à évaluer la masse du moteur que je n'ai pas détaillé en cao. Tout le reste va bien, il suffit de sélectionner le bon matériau.
-
@Ludow , une petite question à toi qui possède les deux roues : Est-ce que le feeling de pilotage entre 18A et 18S est différent, perceptible ? Est-ce que tu pourrais dire sans erreur possible laquelle tu as entre les jambes, lors d'un test en aveugle ?
-
Possible que ce soit volontaire, ce n'est pas une manipe à conseiller à ceux qui ont deux mains gauches. Je suis peut-être trop craintif car je n'ai jamais vu personne se plaindre de s'être coincé les doigts dans une roue qui part en sur-régime, juste quelques grillage de moquette de salon... Il n'empêche, les roues n'ont pas de fonction Arrêt, mais seulement une fonction Veille. D'un point de vue philo, ça me choque un peu pour des engins qui incorporent des sources d'énergie potentiellement combustibles. Seul Ninebot semble avoir inventé un système de Veille profonde, qui oblige à démonter la roue pour remettre en route . Bref. La Tesla est bien organisée et permet de se passer de scotch à moquette, ce qui est une avancée remarquable, digne du 21° siècle. A propos de double face, je n'ai pas compris pourquoi il est sur les batteries et non pas dessous. Edit, après une réflexion intense, j'ai peut-être compris : la coque intérieure forme une alvéole cloisonnée qui encadre chaque batterie, ce qui complique l'opération d'extraction... simple hypothèse.
-
Vous avez vu la mise en route accidentelle en manipulant la roue ?. Je tiens à rappeler qu'il y a là-dedans un moteur puissant, et que si vous vous coincez les doigts avec la roue en position quasi verticale, vous allez tacher la coque avec votre fluide corporel et, éventuellement, polluer tout ça avec divers morceaux de bidoche, ce serait dommage pour cette belle roue... Je ne plaisante pas, le danger est réel. Et pensez à vos enfants, très attirés par tout ce qui ressemble à un bouton. Edit : ça me fait penser à ma tondeuse à batterie Bosh : en plus de la mise en route qui nécessite 2 mains, il y a un interrupteur à clé, ce qui ne serait peut-être une bonne idée sur une roue (la carte mère est toujours sous tension, seul le soft empêche le démarrage du moteur).


