



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
Dans notre propre "mythologie", (la Bible), il y a Ezechiel qui a vu, non pas un banal éléphant rose, mais une double roue et quelques pilotes d'aspect plutôt rébarbatifs : Mais son histoire manque un peu de témoins oculaires, il est peu probable que ce fut l’ancêtre d'une une Gotway Monster.
-
Dans la mythologie chinoise, il y a le dieu guerrier Nezha qui se déplace à l'aide de deux roues de feu : Il s'appelle No Tcha au japon. Quand nos roues font des flammes, c'est plutôt mauvais signe...

-
Oui, double face, mais fin et pas trop puissant. Le "scotch" à moquette est souvent suffisant. Bien dégraisser à l'alcool (euh, sur la roue, pas dans le gosier...)
-
Impec. Il y a ça aussi : http://www.audiophonics.fr/fr/connecteurs-aviation/capuchon-de-protection-pour-connecteur-aviation-gx16-p-10118.html
-
Ma ks16b me va bien, j'en veux bien une deuxième... en attendant une hypothétique 20 pouces suspendue... Là, il y a peut-être un problème, il me semble que dans la 16b les deux packs de batteries sont "à la queue leu leu", il faut passer à la ks16s pour avoir droit aux batteries en parallèle, ce qui favorise les gros courants.
-
Perso, j'aime bien la forme de ces pédales, avec la butée en partie inférieure. Avantages : -- cette butée sert de poignée quand on manipule la roue à l'horizontale (pour la mettre dans un coffre...). Cela évite de saisir le pneu, avec le risque de se tailler un doigt sur la coque biseautée. -- pour déplier les pédales, il suffit d'appuyer sur cette butée avec le pied. Avec sa poignée télescopique, cette roue est vraiment pratique. -- la butée inférieure abrite le ressort de maintien de pédale en position haute. La fiabilité est excellente, ce qui n'est pas toujours le cas des systèmes magnétiques. Inconvénients : -- une fois dépliée, les pédales restent relativement libres, ce qui provoque un bruit de castagnettes en mode trolley sur les pavés. -- il faut penser à nettoyer et graisser le ressort de temps en temps (6 mois ?). Le mieux est de démonter les pédales, ce qui est facile. Possibilité (?) : -- on peut garnir cette large butée d'une languette d'élastomère collée, ce qui peut améliorer le silence, le confort, la garde au sol.
-
Il est bon de signaler que @Olbom vient de griller son connecteur de charge grâce à ce genre de bouchon métallique : https://www.espritroue.fr/topic/2166-cherche-nouveau-connecteur-attention-aux-bouchons-métalliques/ A mon avis, à prohiber car trop dangereux pour Gotway.
-
Nom de Zeus, même sur ma KS je vais garder ma tétine en caoutchouc... Désolé @Olbom , c'est vraiment pas de pot. Le connecteur est très courant, attention à bien choisir un 3 broches, diamètre 16mm (il existe en diamètre 12).
-
Salut @cris6550 , j'ai eu aussi une 16B d'avril, et c'était la 2ième version de pédale, de forme identique à la 1ière version 16A, mais d'un métal plus résistant. Il y a eu aussi toute une histoire à propos d'une "fissure" que l'on voit sur la 1ière photo, alors que c'est simplement un raccord de moulage. Comme je titille le quintal, je suis équipé maintenant de la dernière version, qui cumule métal solide + forme améliorée.
-
Désolé @Aude pour tes blessures. @cris6550 a bien résumé, le dernier modèle comporte de larges rayons au niveau de la butée, ce qui évite l'angle vif très critique. Le sav te fournira des pédales correctes que tu pourras utiliser sans appréhension. Il s'agit de la troisième version de pédale, la première version n'a équipé que le proto KS16A, dont une pédale a cassé (suite à un saut déraisonnable), puis il y a eu un changement de matière pour les KS16B livrées en avril 2016. Les rayons ont été ajoutés quelques mois + tard, il faut noter que les supports pédales sont aussi renforcés (nervures supplémentaires), mais il ne semble pas y avoir eu d'incident autre que la tendance au desserrage de ces supports.
-
@Herve : la GT16 est dispo en version 60 V ou 84 V avec des batteries 680 Wh ou 858 Wh, a priori avec le même moteur. Il est effectivement anormal de vendre la version 60 V en prétendant que le moteur fait 2 kW, ce qui n'est vrai que pour la version 84 V (la vitesse max des deux modèles est différente). J'avais signalé cette anomalie en page 3 de ce fil : Je remarque que même les vendeurs sérieux comme @Eroue font la même erreur :

-
-
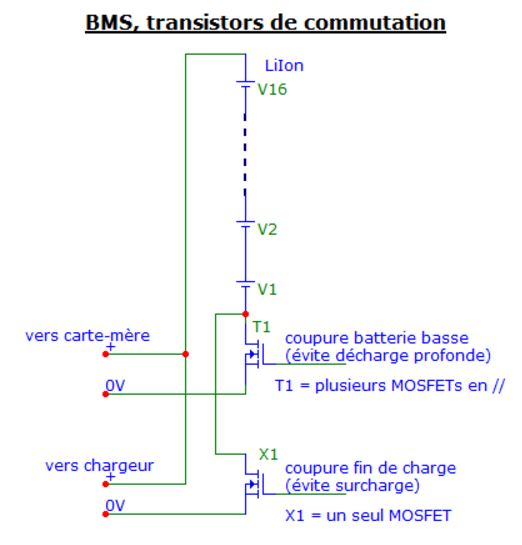
Certains bms peuvent avoir cette structure (image du site Hobby16) : Dans cet exemple, la fin de charge coupe le chargeur, mais évidemment pas la carte mère... Mais maintenant avec les roues qui comportent plusieurs packs de batteries, il y a des fils supplémentaires pour gérer un équilibrage inter-packs, afin d'éviter d'avoir à aligner les tensions avant la connexion en parallèle. @sbouju , toi qui aime la RW GT16, tu vas être servi : Les batteries sont par paire et chaque pack comporte une configuration différente, avec 3 petits fils (rouge-vert-noir) entre les deux. Incontestablement un gros binz.

-
Juste une précision : quand on appuie sur off, la roue ne s'éteint pas, elle passe en veille. Le bouton est un bit testable que le µcontrôleur surveille en permanence. Ninebot a inventé une veille profonde sur sa S2, qui nécessite de rebooter la carte mère. Pour arrêter une roue, il n'y a pas d'autre moyen que de débrancher les batteries, ou de retirer le fusible (quand il y en a un).
-
Bon, pas sûr que ce genre de manipe soit très significative, un pilote immobile doit s'appuyer contre un mur ce qui risque de perturber la mesure, la roue compense la composante longitudinale de l'effort. Plus sympa, la roue toute seule qui a une conso très faible. On peut donc balader nos roues en mode trolley sans état d'âme, ce n'est pas ça qui videra les batteries. <note> Merci pour vos encouragements, mais je dois avouer que je n'ai qu'une expérience modeste concernant les commandes vectorielles de brushless. J'ai travaillé indirectement sur les freins électriques de l'A400M (avion transport de troupe) mais pas sur la partie calcul. Cela demande des connaissances pointues. Le plus souvent, les fonctions sont saisies graphiquement par blocs et un compilateur se charge de gérer le code correspondant afin de piloter le moteur selon les lois désirées. Je ne sais pas comment bossent les chinois, mais il est probable qu'ils utilisent des modules logiciels fournis par des sociétés spécialisées, il reste le paramétrage de ces fonctions que chaque fabricant peut personnaliser. C'est une hypothèse. </note>
-
Vraiment immobile, éclairage éteint. C'est la conso de la carte mère, mais surtout le courant de repos qui a été choisi. Le stator (l'inducteur) génère un champ immobile et en phase par rapport au rotor (les aimants), donc la roue ne tourne pas, mais elle reste "crantée" + ou - puissamment. En toute rigueur, on pourrait se dire que, comme on n'a pas besoin de couple, le courant devrait être le plus petit possible. Ce n'est pas toujours le cas, et certaines commande vectorielles jouent surtout sur la phase du champ tournant, et très peu sur le module. C'est le grand intérêt de ce type de commande, on peut gérer les deux paramètres séparément par programmation.
-
@Boni7league , si tu veux, tu peux faire l'essai suivant : mesurer avec l'appli le courant, roue tenue à la main, verticale, immobile. Dans ces conditions, @Hansolo consomme 2,8 A avec sa MS3+, et moi dix fois moins avec ma KS16B. Cela donne une (vague) idée de la qualité de la gestion de la puissance.
-
Je répond à la place de @alann92 , qui m'a dit qu'on peut faire un peu plus de 20 km avec l'Eva 260 Wh. Il l'utilise quotidiennement pour aller bosser (aller 12 km) ce qui suppose qu'il recharge au boulot.
-
Mauvaise idée. Rouler à vélo sur un trottoir quand on a + de 8 ans est contraire à l'article R412-34 du code de la route, et est passible d'une amende de 4° classe, dont le tarif est, selon les cas : -- amende forfaitaire minorée = 90 € -- amende forfaitaire = 135 € -- amende forfaitaire majorée = 375 € -- amende maximale = 750 €
-
-
J'ai l'impression que ce vendeur (appelé Sam il me semble) est un peu caractériel, il y a des jours avec et des jours sans. Car il a procédé gratuitement à diverses réparations qui, dans certains cas, sortaient de son périmètre. (roue Aliexpress). Cette petite Eva est sympa, la maintenance est assurée, quant au vendeur, ben, faut faire avec... Maintenant, on peut aussi parler de la qualité des vendeurs Fnac, Boulanger... et là, on n'est pas prêts de s'arrêter de rigoler. Je précise que je n'ai aucun intérêt dans cette affaire. Et, vu l'expérience malheureuse de @cris6550 , il faut suivre un éventuel achat de très près.
-
Hop, un de plus, je te confirme que pratiquer le roller ne sert pratiquement à rien. Je totalise plus de 5000 km ( 10 jeux de roues usés ), et il m'a bien fallu 2 heures pour traverser mon garage ( 3,5 m de large). Par contre, ce qui devient rapidement jouissif, c'est qu'en roue on a enfin un mode de freinage efficace. Quand on habite un endroit vallonné comme moi, c'est très très agréable (fini les roues carrées). Perso, je trouve la roue plus sécurisante. A roller, j'ai bien pris une dizaine de gamelles, en répandant aléatoirement mon O+ dans la nature. En roue, quasi rien (quelques chutes mineures), -- pourvu que ça dure -- juste quelques traces sur les tibias. Une restriction, à roller on peut sauter quelques dizaines de centimètres n'importe quand, en roue ce n'est pas possible. Par contre, mon fils (30 ans) qui pratique le monocycle à pédale tout terrain a pris ma roue, et en 1 minute a fait de la marche avant, arrière, pivot 180°, virages serrés. Il lui a fallu 1 minute de plus pour faire du one-foot. C'est ça le sport qui va bien pour la roue électrique.
-
Quelques nouvelles fraîche, avant de refermer cette "enquête". Guillaume de @Eroue ne participera pas directement à cette discussion, afin d'éviter tout dérapage vis à vis du magasin Monocycle électrique. Voilà un petit résumé : D'abord une confirmation : Fastwheel Eva et Newheel Eva sont techniquement identiques Malgré la motorisation annoncée à 450 Watts, les performances dynamiques sont modestes, ce qui pose problème pour certains pilotes. En clair, bien que Guillaume ne l'ait pas exprimé officiellement, je l'interprète comme l'arrêt de la distribution des Fastwheel Eva chez @Eroue . L'usine Fastwheel en Chine est sérieuse et motivée, mais le manque de succès du modèle suivant ( le Ring ) est problématique. @Eroue vend maintenant la jolie Gotway Luffy (10 pouces), qui doit faire ses preuves. Perso, en l'état, je ne lui vois pas d'avenir... Actuellement, cette roue est distribuée par : Airwheel France : http://www.airwheel-france.com/index.php?id_product=103&controller=product Fnac : http://www.fnac.com/mp29324756/Gyroroue-Noir-NEWHEEL-EVA-260-wh/w-4 ...etc ?... Le magasin parisien a une réputation épouvantable, liée à la personnalité de son gérant. On peut espérer qu'avec le temps cette situation s'améliore... Mais si ils arrivent à maintenir cette petite Eva 14 pouces sous la barre psychologique des 500€, ça peut aller... Concernant la roue, je confirme que @alann92 et son copain s'amusent bien avec, et que c'est surtout le manque de vitesse qui donne envie de passer à un modèle supérieur. Peut-être qu'ils posteront eux-même quelques vidéos ici pour démontrer leur savoir-faire. @sbouju : Rockwheel GR12 ? Là ce n'est pas la même catégorie, elle coûte 1000€ au lieu de 500€, elle a un moteur à engrenage obsolète... Elle ne me séduit pas .
-
@RolluS a raison, le MT60 serait parfaitement adapté pour garder la possibilité de déposer la roue : Il s'appelle MT60 parce que le contact peut passer 60 Ampères. Edit : par contre, pour resserrer l'écrou de l'axe, comme ce connecteur ne passe probablement pas dans une clé à pipe, il faut une clé à œil ou à tube fendue.

-
Merci @alann92 , très sympa ta vidéo. Je pense toujours que c'est une bonne petite roue pour jeune débutant, mais qu'elle est devenue insuffisante pour toi qui aime la vitesse. Mais bientôt la mcm3 si j'ai bien compris...

