
Techos78
-
Compteur de contenus
7813 -
Inscription
-
Dernière visite
-
Jours gagnés
192 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Quelquefois j'entortille un sandow autour de la jante. Bien sûr, ne marche que pour les 18" et plus qui ont une roue à bâtons.
-
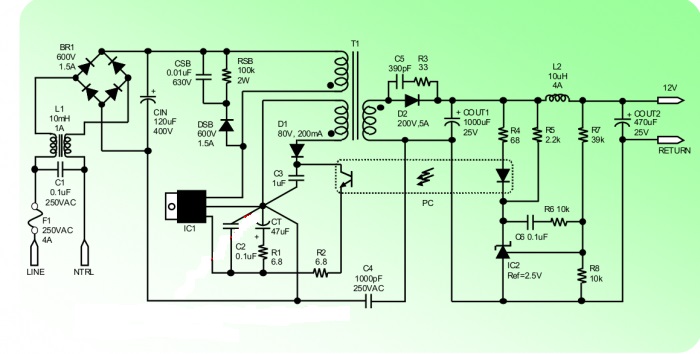
Bah, tu te doutes sûrement qu'au cours des années, ce sujet a été abordé un millier de fois, puisqu'il concerne tous les engins électriques. Donc 5 possibilités : -1- mur puis engin ........ mur puis engin -2- mur puis engin ........ engin puis mur -3- engin puis mur ........ engin puis mur -4- engin puis mur ........ mur puis engin -5- bof, au hasard Tu vas recevoir des réponses très variables, les différences sont anecdotiques et ne rendent pas la charge dangereuse. Cependant, il y a au moins un élément technique à connaître, c'est la création d'une étincelle quand le connecteur du chargeur pénètre ou quitte le port de l'engin. Les étincelles dégradent l'extrémité des broches, c'est une usure relativement tolérable car l'enfoncement complet des broches permet un contact électrique dans des zones saines. Mais des étincelles excessives ne sont quand même pas souhaitables. Elles sont dues à la présence de condensateur(s) à la sortie du chargeur, dont le schéma ressemble à ceci : (exemple en 12V) Voir le Cout2 Si l'engin a la tension batterie directement sur le port de charge, et qu'on y branche le chargeur non alimenté, la batterie charge rapidement cette capa d'où étincelle. Mais si le chargeur est déjà branché au secteur, le condensateur est à la tension max, l'écart de tension est moindre et l'étincelle est plus faible. L'ordre de déconnexion est sans importance, sauf si on arrête une charge en cours. Si l'engin ne présente pas de tension sur son port, c'est qu'il y a une diode anti-retour (sur le bms), ou bien un mosfet de gestion de charge à l'état bloqué, et dans ce cas l'ordre n'a pas d'importance. Certaines notices indiquent un ordre, souvent contradictoire, ce qui alimente des débats byzantins interminables (pléonasme). Perso, j'utilise (v11) le 5, ou engin--mur.OFF quand je charge automatiquement la nuit (secteur décalé).
-

S22 débridée, roue confisquée :-(
Techos78 a répondu à un(e) sujet de SamSuffit dans Les lois et assurances
Chaque été il y a environ 1500 noyades en France. Il est donc indispensable d'imposer le port du gilet de sauvetage pour tous les baigneurs, dès que la hauteur d'eau dépasse 1 mètre en milieu naturel ou en piscine... Toute infraction punie d'une forte amende, payable en liquide, cela coule de source. -
Coup de gueule suite à monoroue sur autoroute!!!
Techos78 a répondu à un(e) sujet de esteban999 dans Le Bar
A contrario, il y a une bande de zozos que j'aimerais remercier... Il y a quelques années, des troublions s'amusaient à faire les cons sur le périphérique, dans les catacombes, etc, en se filmant et en postant sur Utube. C'étaient 3 ou 4 wheelers, d'un bon niveau, qui batifolaient aussi gentiment sur la piste kart de wissous. Je me demande s'il n'y en avait pas au moins un qui avait des accointances avec l'équipe Gyroroue Shop... Bref. Suite à quelques protestations sur le fofo, eh bien pouf, disparus, envolés, ils ont arrêté leurs âneries . Sincèrement merci, et bon wheeling (discret) pour ceux qui sont encore là. -
Oui c'est évident. A priori les 2 photos ont été prises d'un pont, d'un côté puis de l'autre, le wheeler tient son cap Il oblige la voiture blanche à se décaler (trop peu d'ailleurs), ce type est un "je m'en foutiste impavide et amoral". Navrant. Effectivement la communauté en prend un coup. .
-
Je ne sais pas trop ce qui se passe avec la batterie... Par contre, pour l’assiette capricieuse, cela peut faire penser à un défaut rare : la dégradation du capteur. Il est arrivé qu'à la suite d'un choc très sec (mur, sol...) la roue s'asservisse pas ou mal. Le capteur dont je parle est le petit mems sur la carte mère, il intègre 3 accéléromètres et 3 gyromètres... Un exemple : MPU-6000
-
IM adopte l'amortisseur déporté avec la coque qui coulisse sur deux axes latéraux centrés. Le principe est bon, cela a été validé d'abord sur la ks-s18 puis sur plein d'autres. Suspendre les batteries est un gros plus par rapport à la v11. C'est surtout sur la qualité de réalisation que cela va se jouer, certains clients sont fatigués de bricoler les articulations, changer les basculeurs, ajuster les éléments coulissants... De ce point de vue, choisir des ressorts mécaniques évite les galères des vérins pneumatiques, même s'il faut commencer par choisir le bon ressort, avec la bonne valeur lbs (Pound per Inch), kg/mm, N/mm, progressif ou pas etc.
-
Un trois roues articulé robuste, c'est plutôt original : Près de chez moi, je (v11) fais régulièrement la course avec le postier, c'est un marrant. Mais je l'enrhume fastoche... ben oui, il est obligé de s'arrêter régulièrement. . J'imagine qu'il faut être prudent dans les virages, la voie est étroite et ce centre de gravité haut, surtout si on a mis son Saint Bernard dans la caisse.
-
OK, mauvaise mémoire, c'était orange, pas jaune. Je pense que le contrôleur attend une réponse du display, d'où l'erreur 10. Ou bien la liaison série de sortie du display n'est pas ou mal branchée, ou bien elle est grillée... Euh, tu vas rire (?), ça serait bien d'avoir un oscilloscope, c'est un protocole qui ressemble à du RS422, non différentiel...
-
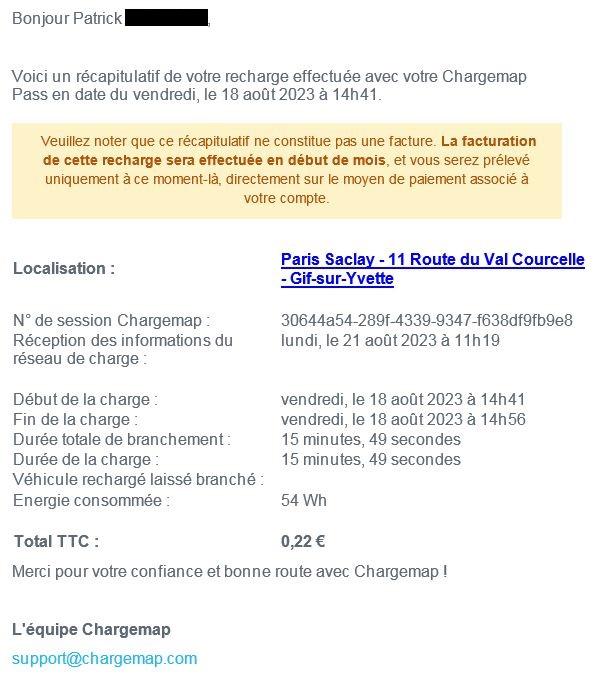
Je confirme, ce n'est pas le cas partout, j'ai rapidement testé une borne qui a réussi à transformer mes 54 Wh en 1 kWh... C'est magique, avec ça on peut sauver la planète : Ceci dit, 22 centimes le kWh c'est très raisonnable... à condition de ne pas charger plus de 3 heures, parce que là, bonjour... Malheureusement, il y a de nombreux petits points de recharge qui se contentent de dire : "carte invalide". Un chauffeur de taxi en Tesla m'a dit qu'il suffit parfois d'essayer une dizaine de fois pour que la "connexion" fonctionne...
-
Salut @Vasquelito , bienvenue sur le forum. Bon, il va probablement falloir investiguer dans la filasse, et l'équipement minimal pour ceci est un voltmètre. Si tu n'en as pas, un truc très simple de chez brico/casto/merlin (une quinzaine d'€) suffit. Se mettre sur Volt DC, mais pas sur Ohm ou Ampère. Les poignées Display+gaz sont plus ou moins complète, mais classiquement on a du +5V (fil rouge et noir) qui est fourni par le contrôleur, il alimente le display et également les "gaz" : -- gaz : commande par gâchette ou poignée tournante. Cette fonction est le plus souvent réalisée à l'aide d'une sonde de hall analogique. C'est un petit composant sensible au champ magnétique, le contrôleur l'alimente en +5V, Gnd, et il délivre une tension variable entre environ 1V et 4V selon l'action sur la commande qui intègre un aimant. Il faut vérifier cette tension. -- display : comme dit plus haut, il faut du 5Volts, mais comme il marche, la liaison doit être bonne. Il reçoit du contrôleur un message numérique par un fil (couleur quelconque), et ceci doit aussi être OK car il affiche un truc cohérent. Par contre, par un autre fil, il sort aussi une liaison numérique et là, a priori, ça ne va pas car le message E10 c'est justement l'absence de ce message Display. Hypothèse : euh, il n'y a pas une nouille jaune qui traîne ?... Bon courage...
-
Je pense qu'il y a une confusion. C'est le courant qui permet les grosses pentes, et c'est la tension qui permet les grosses vitesses. Donc, soit des mosfets bien pêchus (pour le couple) et/ou quelques cellules en plus (pour la puissance). A basse vitesse, on n'a pas besoin de beaucoup de tension (le brushless fait quelques dizaines de milliOhm), il est même relativement difficile de créer un gros courant à partir d'une grosse tension, le faible ratio du pwm impose des pics de courant énormes... Il est aussi possible d'avoir un moteur dont le nombre de spires du stator est modifié (versions LS, MS, HS) car ce sont les Ampères-Tours qui créent le couple. On peut privilégier le couple ou la vitesse, ces données sont relativement indépendantes.
-
Marty, toujours aussi bavard, nous donne quelques nouvelles : https://www.youtube.com/watch?v=IlsPPkJvKa4 Quand même, c'est plutôt émouvant de voir cet "heureux retraité, passionné d'euc" réduit à faire une démonstration de déambulateur... dur, dur... même au second degré il est difficile de plaisanter. La cause racine de sa fracture est un mouvement tournant de la roue (coupée) qui lui a vrillé la cheville. Cela suggère un débat insoluble : faut-il des pédales à clous super accrocheuses, ou un grip ordinaire moins "collant" ?... .
-
Ouch, énorme anomalie . Aucune roue ne doit se couper en roulant à allure normale sans roulis excessif, AUCUNE !!!. Conclusion : ta roue est une merde, tu peux la jeter pour en acheter une autre...
-
Première Gyro et frustrations frustrations frustrations :(
Techos78 a répondu à un(e) sujet de LeKeiser dans Tutoriaux et Apprentissage
Ta mère t'a bercé trop près d'un mur, elle a faussé le châssis . -
Weeped Ghost (Sports) : un petit gros cube
Techos78 a posté un sujet dans Motos & scooters électriques
Les gars de chez Weeped sont un peu excessifs :-
- 2
-

-

-
Chooch Tech disserte longuement en lisant les specs... Pas très utile... Attendons éventuellement les aventures de ce Zébulon en TT : Remarque : les pads sont placés en haut sur la partie convexe... ils sont probablement spécifiques. Ils doivent être pratiques pour appuyer la roue contre un mur.
-
Première Gyro et frustrations frustrations frustrations :(
Techos78 a répondu à un(e) sujet de LeKeiser dans Tutoriaux et Apprentissage
Bien sûr, le 2ième pied ne respecte jamais pile poil la symétrie par rapport au 1er. D'où un petit coup d’œil et un léger one-foot pour rectifier. Certains wheelers (américains...) pratiquent volontairement la dissymétrie, c'est une attitude plutôt marginale, je ne comprend pas ce binz... -
Affirmatif, comme on dit dans les armées militaires (oui, il y a des armées civiles). Nos moteurs sont actionnés par des commandes "tout-ou-rien" (pwm) dont le découpage "sec" génère un spectre large (surtout des harmoniques impaires, les plus désagréables...), qui font vibrer les spires du stator qui est bobiné à fils tendus (frettés mais non imprégnés). Bon, il faut que les chiens s'y fassent... d'expérience, il y a 2 ou 3% de chiens très réactifs, éventuellement perturbés aussi par l'étrangeté de l'ensemble roue+pilote... et c'est pire près des propriétés quand le chien se considère chez lui. Perso, je suis plus ennuyé par les laisses kilométriques que par les chiens hargneux.
-
Hop, une autre :
-
Une petite vidéo promotionnelle, très bcbg. De jeunes pilotes, bien sages, jambes très raides, ce qui est classe mais un peu dangereux sur nos routes tiers-mondistes, malgré la suspatte. . Edit : je me demande comment seront choisis les différents ressorts, la gamine a un sag tout petit :

-
Pour ce genre de boniment j'ai eu l'occasion de répondre : " mets un rétro, bouffon". Faut-il que je précise que le gabarit du mec n'était pas trop impressionnant... .
-
Pas mal, une structure moderne, des roulettes de suspension qui pourront être remplacées par des roulements céramique... Elle est relativement "nue", mais pourra être habillée avec des pads, sobres ou flashys selon les goûts. Avec beaucoup d'honnêteté, KS a rangé cette 17" dans la catégorie 16", Leaperkim/Patton (~39 kg !!) n'a pas eu cette franchise. Je suis de l'avis de @v5f06, 84V est suffisant, les tensions supérieures sont effectivement utiles que pour les roues rapides, ce qui n'est pas la vocation d'une urbaine (théoriquement limitée à 25 ).
-
Rétrospective – Accident et côte cassé
Techos78 a répondu à un(e) sujet de V. D. dans Discussions générales
Un temps pluvieux n'est pas toujours nécessaire, particulièrement en forestier où l'herbe et la gadoue conchient les meilleurs grips. Mais les déplacements de semelles peuvent aussi être consécutifs à des chocs... oui, même en roue suspendues. Un exemple récent, en v11 : J'ai tapé sévèrement un ralentisseur à vitesse moyenne (~25) jambes (trop) raides. Fatal error, léger décollage et les pieds qui retombent très en avant des pédales. Impossible de ralentir, wobble infernal, au bout de ~30m j'ai choisi de "m’asseoir" sur la route, légèrement en biais (ouf, personne en face) pour coucher la roue. Contact au sol guère plus de 15km/h, glissade 3m. Pas de bobo pilote et vêtements (aucune protection), presque rien sur la roue. En résumé : attention aux chocs... En toute rigueur, des pieds juste posés sur les pédales ce n'est pas hyper fiable. J'ai souvent pensé qu'une butée à l'avant serait peut-être utile, à la manière des cale-pieds légers, que j'utilise depuis toujours sur mon vtt. -
Inmotion V12 HT (Hight Torque version)
Techos78 a répondu à un(e) sujet de Fabien Wheel dans InMotion
Des pads sympathiques :


