



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
Avec les DIY à base de transfo de µondes, j'ai l'impression qu'il y a un choix cornélien, sur le nb de tours du secondaire. Classiquement, on met 2 spires de très gros fils, mais c'est un peu juste dans les cas exigeants. Certains mettent 4 spires, mais pour cela il faut 2 transfos tête-bêche : J'avais bien regardé le spotwhelder GLITTER 801, mais il est un peu cher, et pas toujours dispo. Le DOCREATE est mon second choix, sachant que cette marque est "solide" car elle réalise des machines haute puissance professionnelles. La promo est sympathique (et rare), le prix descend sous les 100€. Un unboxing pas terrible : https://www.youtube.com/watch?v=vqMeB_pUDiY Un excellent test en allemand : https://www.youtube.com/watch?v=x5x5YHpzgCA Vidéo asiatique, qui montre l'intérieur de la bête : Une autre (indienne ?) qui n'apprend rien, on a fait le tour du sujet https://www.youtube.com/watch?v=2iEJD8U69Fk Ce modèle a l'avantage d'être livré avec son adaptateur secteur, de nombreuses soudeuses n'ont qu'une entrée USB-C sans rien d'autre.
-
Je complète mon équipement avec un chargeur / testeur de cellules, 4 slots : Chez Amazon, livraison 6 jours. Ce truc comporte donc 4 emplacements indépendants. Il permet de régler les courants de charge, de décharge, il fait la mesure rapide de résistance interne ce qui donne une idée claire de l'état d'usure. Il est théoriquement bien protégé, y compris contre les inversions. Ce n'est pas un appareil récent, on le trouve en vidéo youtube, par exemple : https://www.youtube.com/watch?v=nGpbvb8_OM0 Je ne suis pas sûr que la glissière coulisse suffisamment pour les cellules 21700, ce n'est pas mon besoin actuel, et au pire cas on peut bricoler un adaptateur.

-
Mmmhh, une évocation horrible, dire "eppur si muove" pouvait coûter la mort aux temps maudits des intégristes catholiques...
-
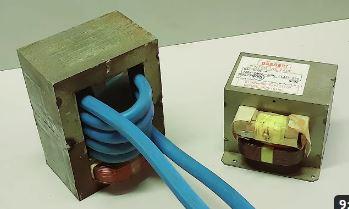
Hi all, (pour les réfractaires à l'anglais, spot welder = soudeuse par points) Tout est dans le titre, et je suis obligé d'y passer car il me faut réparer des packs HS pour rééquiper une ks16b. Je ne croyais pas que c'était aussi compliqué, j'ai passé 2 jours à scruter les technos/prix/puissances des différents modèles, sans oublier la fiabilité, disponibilité, praticité... Les familles principales : -- les grosses boîtes (genre Sunkko 7xxx), qui incorporent un gros transformateur secteur. Les prix sont classiquement autour de 200 ou 300€, ils ont en façade un porte électrodes, pas toujours pratique pour les gros packs. -- les ultra-mini boîtes, qui en fait n'ont que le réglage+switch, l'énergie venant d'une batterie externe, éventuellement automobile 12V. Prix inférieur à 50€. -- les mini boîtes, qui incorporent deux cellules plates de batterie. Ont souvent une sortie usb. Le + souvent, la puissance limite l'épaisseur à 0,15 mm en pur nickel. -- les boîtes intermédiaires, incorporant une paire de super-condensateurs, souvent 2x3 kF (kilo Farads), sortie 5,4V. Cette techno est relativement nouvelle, le prix autour de 140€. La puissance est suffisante pour le nickel 0,2 , et possiblement pour le 0,3. Mes critères : prix < 100€, soudage 0,2 mm à coup sûr, pédale inutile, deux pointes de touche individuelles. J'élimine les mini soudeuses à cause du manque de fiabilité (stockage long terme ?) et puissance. J'élimine les grosses boîtes, chères et encombrantes. Je choisis un spotwhelder capacitif, et je viens de commande ceci chez ali ; Oui, la forme hexagonale est bizarre, elle est due aux deux gigantesques capas internes : Quand les condensateurs sont à 0 (après un très long stockage), il faut 20 mn pour les remettre à 5,4V. Ce spot welder ne pratique pas la double impulsion... Le réglage est hyper simple : un bouton rotatif qui fait poussoir, pour la puissance et pour le temps d'attente de déclenchement auto. L'afficheur donne aussi la tension. Les vidéos valident le soudage pur nickel 0,2 , mais pas la double épaisseur 0,15+0,15 ce qui est nettement plus méchant que la simple épaisseur 0,3. https://fr.aliexpress.com/item/1005005969448709.html?spm=a2g0o.order_list.order_list_main.4.21ef5e5b5h7BOf&gatewayAdapt=glo2fra Livraison en moins d'une semaine...


-
Bon, les gars, si vous êtes intéressés, eh bien c'est trop tard, je suis officiellement sur le coup. L'échange "roi de la chanson" vs "monnaie" sera effectif un peu + tard, en toute rigueur le titre de cette p.a. sera taguée [vendue] début janvier, quand tout sera stabilisé...
-
Il y a eu une époque où le franchissement d'un petit obstacle (bateau, branche...) à très basse vitesse pouvait cramer la cm. Les roue récentes ont (en principe) une meilleure protection contre les pics de courant. Le problème est qu'à basse vitesse, certains mosfets sont excités plus longtemps. En roulant, la puissance est répartie sur les 3 paires. Comme d'hab, le premier constat consiste à coucher la roue (éteinte) et à sentir si le moteur freine anormalement (générateur en court-circuit). Si oui, carte mère à changer .
-
Je n'ai jamais réussi, même assis maintenu par mes brakepads, le cul dans le vide, et en tirant la poignée. OK, merci. Une position critique dans laquelle il faut penser à se relever à V=0, sinon on repart dans l'autre sens...

-
-
Désolé, je n'y connais rien en trott', mais Google m'aime bien et il m'aiguille vers : https://youvelo.fr/blog/article/61-reglage-compteur-trottinette-electrique-guide-ultime Donc il semble que P0 corresponde au diamètre de roue, en pouces, on a droit de mettre une décimale, par exemple 8,5 pour une Dualtron Mini. Pour trouver le diamètre, on peut mesurer la circonférence en roulant avec des repères (scotch...), puis appliquer : Diamètre (") = Mesure (mm) / 25,4 / 3,1415926535897932384
-
Oui, le monocycle musculaire est diabolique... J'ai essayé une semaine... dur, dur... ce n'est clairement pas mon truc. Edit tardif : ci-après une petite phrase d'un prof qui mouille la chemise : Mmmhh, c'est tentant, vais-je encore emprunter un mono de mon fils...
-
Yesss. Mais il faut que la visière soit pré-équipée avec 2 bitonios qui nécessitent que la visière soit percée.
-
Oui, la buée sert surtout à démontrer que tu es encore vivant. Les vendeurs sérieux peuvent percer la visière pour placer un Pinlock. Il y a aussi des sprays dont certains très efficaces. Enfin, tu peux faire comme les plongeurs : cracher dans le casque. C'est dégueulasse, n'est-ce pas ?. Il faut demander à @King Size ...
-
Donne-nous ta localisation géographique, stp... La coque a un bel aspect, tu as été soigneuse pour ton apprentissage. Perso je suis légèrement intéressé pour réparer la mienne, atomisée par mes petits enfants (10 ans). C'est dommage que ce soit la 640... je réfléchis... il faut vraiment que j'investisse dans un spot-whelder... Mmmhh... Tssss... Je pourrais aller jusqu'à 300€, à condition que ce ne soit pas en Nouvelle-Zélande... Bon, je ne place pas d'option dessus pour l'instant, c'est juste pour discuter...
-
Tu peux aussi, pour les randos extrêmes, compléter avec un masque semi-souple ou rigide. Par exemple : Sans chercher à démotiver quiconque, en 7 ans d'observation de 2 fora je ne me rappelle pas avoir vu un wheeler se démonter la mâchoire. Ceci dit, je suis particulièrement miro.

-
HS : comment est le rejeton d'un dahu "horaire" et d'un dahu "trigo" ? Si c'est un dahu "quinconce", son espérance de vie est plutôt réduite...
-
Bah, faut-il vraiment chercher à tout prix un style considéré comme "académique" ?. On peut aussi se contenter de faire comme on peut, et au bout d'un "certain temps", on (i.e. tête+corps) choisit naturellement une solution, éventuellement différente de son voisin. Un exemple : il y a eu un sauteur en hauteur (Fosbury) qui aimait bien faire l'inverse de tout le monde, malgré qu'on le taxait d'un haut niveau de crétinisme pour retomber sur la nuque... Finalement, tout le monde l'a imité. On peut donc essayer de se libérer de contraintes, et faire comme on a envie. https://www.youtube.com/watch?v=4c3W0yZ3_E0 Donc on ne tape plus sur les doigts d'un gamin qui tient son stylo comme un tisonnier, on ne tord plus la cuillère d'un gaucher qui mange sa soupe...etc. +1 pour le 8...
-
Comme un Californien qui attend son Big One ?
-
Quand un homme vieillit, les raideurs se déplacent...
-
Bonjouratousse, Hier soir j'ai assisté dans mon bled à un sympathique spectacle, 5 artistes dont 1 femme et un musicien (+ 1 chien, et deux techniciens), dans un show exploitant des engins KS et IM et gyropode 9B. Très bon niveau, comparable aux prestations d' @Hirsute , mais avec l'avantage de figures combinées (dont un porté à 2 niveaux), ainsi qu'un jonglage massues très dynamique et parfait. En permanence, une petite touche d'humour bien dosé. La gymnaste a aussi montré un beau travail sur vélo musculaire... La salle convenait parfaitement, en offrant une vue plongeante, une scène généreuse et des coulisses latérales multiples. Cerise sur le gâteau : mon grand âge (>65) m'a donné droit au tarif 15€. Seule ombre : on n'était pas bien nombreux, je dirais ~200, c'est bien dommage. Hésiter plus de 5 millisecondes serait impardonnable, foncez les voir...
-
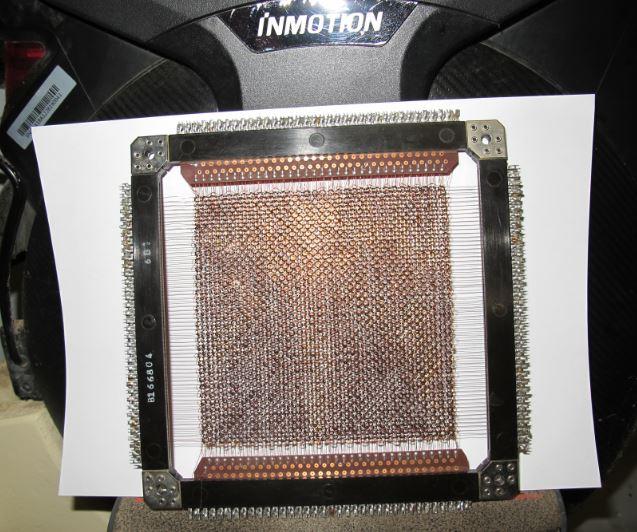
Qu'est-ce que j'ai posé sur ma v11 (avec un A4 derrière) ? Eh bien, c'est une mémoire à tores de ferrite, à chaque ligne/colonne de cette matrice il y a un petit anneau magnétique qui mémorise 1 bit de manière non volatile. Donc 64x64= 4096 bits = 512 octets. Ben oui, quand j'étais jeune, on ne parlait pas de GigaOctets, TeraOctets, PetaOctets... Inutile de rigoler, c'est avec ce genre de chose (à peine + moderne) que l'on pouvait aller sur la lune... https://fr.wikipedia.org/wiki/Mémoire_à_tores_magnétiques
-
Cette vidéo est trompeuse, la chute du pilote est coupée. Il s'en tire avec une entorse au pouce et genoux+coudes éraflés.
-
En ce qui concerne le couple de cette roue moyenne, on peut se rassurer en regardant cet essai, devant le magasin Gyroroue Shop : Non erreur, c'est E-roue, merci à @adri75 pour avoir signalé ce gag. Ce gaillard talentueux l'exploite sans hésiter, et ça se passe bien. J'imagine qu'il faut juste un peu se méfier des longues grimpettes, la dissipation cm+batterie n'est pas excellente. <HS> Qui est ce gars ? Fait-il partie du fofo ? Un coucou serait la bienvenue... En fait, je le hais, je n'arriverai jamais à faire pareil... .
-
Ne te fâche pas, stp, c'est précisément parce que tu t'exprimes bien avec une orthographe soignée que je me permets cette minuscule remarque : balade avec un seul L . Nous avons eu un gros débat sur ce sujet, et c'est à peu près la seule contrainte qu'on s'impose sur le forum... pour le reste, houlala, on voit un peu de tout, mais ce n'est pas bien grave.
-
<HS> Je me rappelle mon étonnement quand on m'a appris qu'un voltmètre se doit d'avoir une résistance immense, et un ampèremètre une résistance infime... . Pour éviter les soucis, je préconise l'usage d'un multimètre de ce type : Attention, choisir une pince ampèremétrique qui mesure le DC (sonde de hall interne). Excessivement pratique. Noël approche, pensézi...

-
Tu as mal lu et écouté la vidéo, dans laquelle les masses sont exprimées en grammes, ce qui est faux, il faut des kilogrammes pour que les unités soient homogènes. C'est de la physique de base niveau bac-2, c'est un axiome c'est à dire une convention qui fonctionne comme ça et qui marche bien. Donc pas de démonstration https://fr.wikipedia.org/wiki/Différence_entre_masse_et_poids : A la surface de la Terre, un objet dont la masse est d'un kilogramme pèse environ 9,81 newtons, ce qui correspond à la masse de l'objet multiplié par l'intensité du champ gravitationnet à l'endroit où se trouve l'objet. En conséquence, la formule de la vidéo donne un poids en milliNewton en non pas en Newton. Erreur d'un facteur 1000. Kif kif pour l'énergie cinétique et l'énergie potentielle de gravité, il faut des kilogrammes, il suffit de consulter internet pour s'en assurer. ---------------------------------------------------------------- Monter puis descendre, accélérer puis décélérer, cela met en oeuvre des énergies qui sont dites "conservatives", c'est à dire qu'une fois le cycle terminé, vous revenez théoriquement à zéro, sauf bien sûr qu'il y a fatalement des pertes : aucune balle ne rebondit à la hauteur où on l'a lancée...etc. Alourdir un véhicule pour espérer gagner quelque chose est bidon, si c'était vrai il y a longtemps que cela se saurait ( Isaac Newton 1687 ...). Demandez à un cycliste s'il accepte de rajouter 15 kg à son vélo pour descendre le col plus vite .



