
Techos78
-
Compteur de contenus
7793 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Si tu as réussi à garder ta ks16b (800W) pendant 6 ans, c'est que tu n'est pas vraiment un speedy déchaîné. (euh, 20km, c'est sûrement une 420 Wh) En roue relativement classique et pratique avec laquelle tu devrais tangenter les 80 km d'autonomie, la v11 est un choix raisonnable. Perso, les nouveaux monstres hyper véloces ne me tentent pas, une roue 84V est suffisante pour wheeler à 45 km/h. La suspension, de qualité moyenne, digère plaques d'égout et ralentisseurs, c'est très sécurisant. Juste un avis, 13000 km au compteur.
-
Tiens, tiens, tiens, voilà une phrase que je n'avais pas remarquée et qui m'interpelle puissamment. Quand j'ai récupéré ma v11 (from e-roue shop) suite à un cramage (de routine?) de la carte contrôleur (pas la carte puissance), après charge batterie la roue refusait de m'accueillir à bord à l'aide d'un fort tilt back/front accompagné d'une vocifération oiseuse de type "casse toi tu pus". Après analyse, j'ai vu que la carte mesurait plus de 85V, je me suis contenté de diminuer la tension du chargeur à 82 et des poussières. Je n'ai pas perdu en autonomie car le seuil bas réel est aussi vu de manière optimiste. Donc les SAV Inmotion ont une appli pour calibrer la tension mesurée par la carte. Est-ce que le constructeur, le distributeur, le sav prennent le temps de charger à fond avec un chargeur étalon pour régler pile poil le 100% ... euh, je suis un peu dubitatif. Edit : mais les nouvelles appli clients ont peut-être la fonction... quelqu'un sait ? Et il ne faut pas confondre la calibration de l'appli et la calibration de la roue (qui déclenche les alarmes).
-
Ta roue neuve est complètement hs , ou pas ?
-
Critiquer les power-pad, comme étant un effet de mode ou un syndrome mouton-panurgien ? Oui, tu risques l'opinel entre les omoplates Perso, jamais testés, je n'en ressens pas le besoin, sauf dans les montées longues, ou pour appuyer la roue contre un mur. Mais je testerai peut-être un jour les bandes de mousse (amazon) en partie haute pour ajouter du grip juste sous le genou, la selle v11 est idéale pour ça. Le besoin est d'entraîner la coque en serrant les jambes uniquement si nécessaire, . Oui, les power pads servent à ça, mais si la route est ondulée verticalement les jambes fléchies ajoutent des sollicitations moteurs parasites. Et des power pads trop bas... ça ne sert à rien.
-
Les russes EUC YOU fabriquent de nombreux supports pédales de diverses longueurs , et si j'ai bien compris, quand ils disent par exemple -30mm , c'est que les pédales seront 3cm plus hautes. Donc là il s'agit de porte-pédales 20mm qui abaissent le pilote de 2cm. Par rapport au support d'origine : on voit effectivement que les pédales seront surbaissées. Le nouveau support n'est plus évidé, mais comme il est plus court la masse ne devrait pas trop évoluer. Je vois quelques inconvénients : -- le gros trou de fixation sur la tige de fourche n'est plus débouchant, la tige sera donc pincée avec moins d'efficacité et les deux vis subiront un effort accru, dû au raccourcissement du bras de levier par rapport à l'extrémité de tube. -- les deux lamages des trous de ces deux vis empiètent sur la surface de contact du talon de la pédales. C'est critiquable car la pression de contact est énorme à cause du bras de levier court entre l'arrête basse de cette surface et l'axe pédale. -- D'aspect, le traitement de surface ressemble à de l'alodine 1200 ce qui serait franchement insuffisant pour des pièces soumises aux intempéries. Une oxydation anodique me semble indispensable, quelle que soit la couleur. Précédée peut-être un billage pour velouter la surface et casser les arrêtes. NB : toutes ces fixations traditionnelles de pédales ont un défaut rédhibitoire : le trou d'axe s'ovalise et la pédale prend du jeu après quelques mois d'usage. Je remarque cependant (sur ma v11) que la présence de la 3ième vis qui bloque l'axe minimise grandement cette prise de jeu. Mais ici, cette 3ième vis est en dessous et donc l'axe aura tendance à jouer à la balançoire, et pourra peut-être se tordre...


-
HS -- Salut @Pat75 , bien qu'elle soit explicite, je ne connais pas cette expression de métallurgie/sidérurgie. Les défauts de l'acier les + courants : - en inclusion interne : paille (impureté) , soufflure ou piqûre (bulle gaz) - en dislocation interne/externe : fissure , tapure - en défaut externe : épaufrure , entaille , crack - ... Tu confirmes ton expression ?
-

Avis crevaison suspecte
Techos78 a répondu à un(e) question de Thomas Cappelletti dans Questions / Réponses
La bonne habitude quand on monte un pneu (jamais à la graisse) : on gonfle pour que le pneu prenne sa place (la chambre est éventuellement étirée au niveau des flancs), puis on dégonfle complètement pour libérer les contraintes de chambre, puis on regonfle au nominal. -
Euh, il est partie , partis , parti...
-
hs -- a priori (ce fut mon cas), les roulements v11 mouraient (i.e. devenaient bruyants) le plus souvent à cause de la poussière. Mais l'eau pouvait aider à déplacer la poussière, par exemple lors de la dépressurisation du moteur lors du refroidissement. Euh, tu devrais consulter un toubib
-
Allons don' comme dirait un canadien, ce n'est pas la première fois que KS fait ce genre de connerie. Vous confirmez ?

-
Avis crevaison suspecte
Techos78 a répondu à un(e) question de Thomas Cappelletti dans Questions / Réponses
Bonjour Thomas, bienvenu sur le forum. Juste une question : tu es sûr de ne pas trop taper trottoirs et nids de poule ? Car c'est radical pour pincer la chambre et donc crever quand on n'est pas hyper gonflé. J'imagine qu'en trott' on doit pouvoir sauter de l'avant, mais l'arrière doit déguster un max. On a moins de pépins sur nos e-roues grâce au pneu de gros diamètre. -
Elles arrivent, elles sont là :

-
Sauf erreur, on peut effectuer une règle de 3 multiple quand on sait que pour monter 75 kg à 1 mètre en 1 seconde il faut 736 Watts (c'est la définition du cheval vapeur). Donc pour pilote 110 kg + roue 20 kg , pente 25 % , vitesse 15 km/h ( 15 x 1000 / 3600 = 4,17 m/s ) , il faut : 736 x ( 130 / 75 ) x ( 4,17 x 0,25 ) = 1330 Watts -- les parenthèses ne sont pas nécessaires Là, pour simplifier les 15 km/h sont la vitesse horizontale. Cette puissance est uniquement consacrée à vaincre la gravité, il faut additionner la puissance nécessaire pour rouler, on peut pifomètrer une consommation sur plat de l'ordre de 14 Wh/km à 15 km/h, il faut 14 x 15 = 210 Watts , ce qui fait un total de 1540 Watts strictement nécessaires. La puissance nominale consommée (i.e. à mi-batterie) de la v10F est 2000 Watts, on peut pifométrer un rendement de 80% donc 1600 Watts mécaniques disponibles. Bilan : oui, la v10f satisfait (tout juste) l'objectif. Remarque : une pente de 25% sur 200 mètres est exceptionnelle, perso je n'ai vu ça qu'en Norvège et dans des îles volcaniques.
-
Quels équipements utilisez vous contre le froid ?
Techos78 a répondu à un(e) sujet de B3stiol3 dans Équipements
Quelques phrases cultes, exemple : Il faut annuler le cassoulet Poulard, ça vous fait crever tôt ou tard... -
Il faut avoir conscience que ces pads seront essentiellement autocollés en partie centrale sur la "jambe" de la "selle" v11, et donc que les efforts d'accélération/freinage vont cambrer la mousse et la faire frotter sur les carters batteries. A mon avis seuls des pads de confort en partie haute sont réellement efficients, et il faut abandonner toute idée de pads de saut, ce qui d'ailleurs n'est pas trop la vocation de cette roue. Des pads en haut n'interfèrent pas avec les pédales, et il facilitent l'appui contre un mur.
-
Un exercice rare : le dérapage volontaire -- sur carrelage sec :
-
Tu l'as peut-être déjà compris, il y a une tradition incontournable lors de l'apprentissage : c'est, lors des démarrages vasouillards, de s'envoyer de bons coups de pédales dans les chevilles. Le blindage évoqué par @King Size peut donc être étendu aux endroits critiques.
-
Bonjour @Chrischris , sois la bienvenue. C'est comme pour le vélo, il y a très peu d'échec d'apprentissage, et si tu arrives à faire 100 mètres, il n'y aura pas de problème. Je confirme ce que vient de dire @Falpa , un débutant serre beaucoup trop les jambes, surtout parce que son manque d'expérience le rend instable. J'ai appris sur une roue assez peu confortable (ks16b) et je m'en souviens encore, pourtant je n'ai pas des jambes de gazelle. Donc des sessions pas trop longues, une grande zénitude et ça va venir tout seul, le démarrage sans appui puis les virages courts.... Le moment magique, c'est quand on arrive très exactement à l'endroit désiré .
-
[achetés] Recherche fichier impression 3D à acheter : Power PADS KS S18
Techos78 a répondu à un(e) sujet de Bouneusse dans Accessoires
L'essence F n'attaque pas les plastiques, et est relativement efficace sur les traces de colle, par exemple ces putains de code à barres... Odeur modérée. Eviter le dissolvant acétone, et l'introuvable trichloréthylène, qui décapent plastiques et bronches. -
J'ai mis 42 km/h. Raisons : -- comme chacun sait, Usain Bolt a couru le 100m en 9,58s, soit une pointe d'environ 43km/h. Très modestement, ma vitesse max est inférieure , et représente donc la limite de vitesse humaine. -- je ne porte aucune protection, c'est mon instinct de survie lui-même qui m'impose une certaine retenue, et ceci depuis plus de 60 ans en vélo, rollers, ski, trottinette. -- j'ai une confiance modérée sur la stabilité d'un ensemble pilote+monocycle, même les meilleurs peuvent se faire wobbeliser : Marty se gaufre en ligne droite ! -- j'ai une conduite calme, par temps correct et bitume je suis à l'aise à 35, mais ma sérénitude dégringole au-delà, j'évite donc de rouler trop longtemps à 40. De plus, le bruit de l'air me fatigue. @MrP-MrF : le pneu d'origine de la v11 est pénible, sensible au dévers donc délicat dans les courbes, les ornières et fractures de bitume, pour moi la pression ne change pas grand chose, je mets 2,5 Bars et je regonfle quand cela descend sous 2. Il y a des pneus meilleurs, en routier par exemple le Pirelli Angel.

-
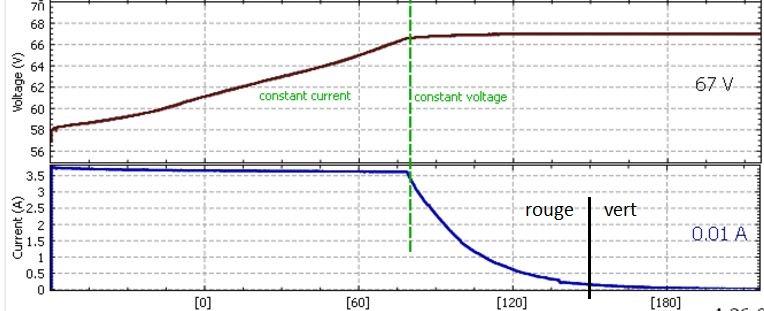
Allure générale d'une charge : (exemple d'une charge 67,2V) : Le rouge->vert est une indication visuelle sans conséquence électrique.
-
En bref, voilà le truc : (pour la centième fois ) Le chargeur se contente de fournir une tension fixe (67,2V ou 84V ou 100,8V ...) , cette tension descend afin que le courant ne dépasse pas une certaine valeur ( 1,5A ou 2A ou 2,5A ...). En début de charge, le chargeur est en mode courant constant puis il passe en mode tension constante en fin de charge, et il met sa diode au vert quand le courant est sous une certaine limite (400mA ou 200mA ...), mais la tension est maintenue indéfiniment (sur les chargeurs d'origine, car certains chargeurs puissants coupent la tension). Les packs de batterie comportent une carte nommée poétiquement bms (battery management system), c'est celle-ci qui gère l'équilibrage car chaque groupe des cellules en série (16S ou 20S ou 24S ...) mesure la tension (4,2Vmax) et dérive le courant résiduel de charge quand cette tension est atteinte (système by-pass). Les groupes qui se chargent moins vite (les meilleurs) prennent donc plus de temps, il faut donc maintenir de temps en temps le chargeur diode verte une heure ou deux pour que cet équilibrage puisse se compléter, ce courant final est faible, voisin de 40mA par branche parallèle (1P ou 2P ou 3P ...).
-
Il faut aller dans ton profil mettre ta date de naissance dans le format JJ/MM/AAAA, le site fait le calcul (et te souhaite ton anniversaire).
-
Pour rentrer la v11 dans son emballage, il faudra dégonfler les suspensions. Je te conseille de mettre la roue à plat, ou même de la mettre la tête en bas avant d'appuyer sur les obus schrader, (uniquement ceux du bas, chambres positives) car les pistons crachent un fluide transparent, probablement une huile hydraulique lubrifiante. J'imagine qu'ensuite il faut la mettre en mode transport par l'application. Bon courage.



