Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-

Développement d'un amortisseur pour Gyroroue
Techos78 a répondu à un(e) sujet de Emil121 dans Équipements
Bon, faut pas trop pourrir le topic de @Emil121 qui se consacre plutôt aux amortisseurs "traditionnels". Et il a raison de poser des questions vu le peu de détails disponibles. Dans le meilleur cas, on a le ratio de débattement roue/piston, mais je n'ai jamais vu la courbe de débattement en compression d'une roue, et les dimensions exactes des basculeurs ne sont jamais indiquées ou mesurées, on ne peut donc pas calculer cette courbe. Quant à la courbe d'effort=f(sag), cela reste un mystère, et comme on ne connais pas le volume des chambres et la position de référence du piston, là encore impossible de calculer quoi que ce soit. Désolé @Emil121 , je n'ai jamais vu les infos qui t'intéressent, les constructeurs donnent juste quelques pressions envisageables, avec une maxime implicite : "faites nous confiance". On observe, par rapport à la ks-s20 initiale, une inclinaison plus prononcée de l'amortisseur afin de mieux le ranger sous la selle. mais cela diminue la course et augmente donc la pression... et les contraintes sur les articulations. Je ne vois pas d'autre solution que le retro-engineering manu militari. Bon courage si tu t'y colles. -
Développement d'un amortisseur pour Gyroroue
Techos78 a répondu à un(e) sujet de Emil121 dans Équipements
Là, c'est simple, il suffit de regarder ce qui se passe dans le monde vtt... entre autres. Le principe est bon (idéal selon moi), mais la réalisation peut faire appel à plusieurs technologies. Pour le bas de gamme, on peut avoir une suspension élastomère d'un seul côté, et en haut de gamme de l'oléopneumatique des deux côtés... Il serait possible d'utiliser une suspension à ressort, mais régler le sag selon le pilote et l'activité serait probablement ingérable. Je n'ai pas trop d'expérience en fourche télescopique, mais j'ai eu l'occasion de tester (un peu) un vélo de descente... c'est incroyable, un pur bonheur, on se sent pousser des ailes... L'entretien en très haut de gamme c'est : changements de joints, éventuellement de clapets, et surtout changement d'huile. Par nature, une fourche suspend, amortie et guide. Donc le dimensionnement et la réalisation doivent être soignés pour éviter le jeu, l'usure, les flexions. Pour une roue, surtout si elle est puissante, il ne faut pas que sa fréquence propre en flexion crée des résonances selon la bande passante de l'asservissement. En clair, il faut une bonne raideur. A priori, la fourche inversée de la Sherman S semble bien faite... l'avenir dira si cela se confirme. -
Développement d'un amortisseur pour Gyroroue
Techos78 a répondu à un(e) sujet de Emil121 dans Équipements
@Emil121 D'abord, félicitation pour tes exploits de motard, les motos actuelles (pneus larges, centre de gravité bas) obligent à prendre des angles déments, cela inspire le respect. Je me suis modestement contenter d'user mes repose pieds en biseau sur mes Honda GT, vraiment banal... Honnêtement, voilà mon avis : les e-roues à amortisseur déporté sont une mauvaise solution, les double basculeurs sont trop complexes, coûteux, encombrants, moches, articulations calamiteuses, sur-contrainte fonctionnelle entre fixations au moyeu et fixations de l'amortisseur (nécessite des cales dans certains cas), loi d'enfoncement antagoniste donc défavorable : plus on compresse la structure en 'ciseau", moins elle résiste. Il y a dans le monde vtt un grand choix d'amortisseurs, je comprends mal le besoin d'en créer de nouveaux... Pour moi, mettre les amortisseurs verticalement est LA solution. L'Inmotion v11 a fait un truc pas trop mal, juste deux pistons à deux chambres sans amortissement, dommage que les glissières ne soient pas très réussies. A l'usage ça va à peu près, pour un wheeling relativement tranquille. J'aime bien. Tagadatatsoin, qu'on se le dise, voilà la solution de la mort qui tue : tout simplement une fourche centrée, et rien d'autre, concoctée par un spécialiste de l'amortissement : la SHERMAN S . Sincèrement, je pense que tous les amortisseurs déportés peuvent aller se rhabiller. . C'est dit ! -
Sans hésiter : les plus petites, 3mm est très suffisant, surtout quand on en met 3 ou 4. A ce niveau l'effort tangentiel est faible, c'est quand on est proche de l'axe qu'il faut plus de matière. Tout dépend de ce qu'on a sous la main. Perso, sachant que le pion ne peut pas s'échapper, j'utiliserai des tiges inox récupérée dans la partie cylindrique de vis partiellement filetées. Et pour le ceinture+bretelle, une lichette de frein-filet fort.
-
Première Gyro et frustrations frustrations frustrations :(
Techos78 a répondu à un(e) sujet de LeKeiser dans Tutoriaux et Apprentissage
J'ajoute qu'il n'est pas inutile d'avoir pratiqué un "sport de chute", genre judo, rugby ... -
Diable, un souci potentiel... J'ai jeté un cil sur le mini manuel dont je dispose, il dit : How to stop charging : -- Step 1 : Press the button and disconnect the vehicle connector from the vehicle inlet. -- Step 2 : Close protective cap of vehicle inlet ... etc Donc effectivement le bouton ne sert pas uniquement à changer le courant (quand on ne charge pas), mais aussi à arrêter la charge. Bien sûr, on ne peut pas presser le bouton et débrancher la voiture simultanément, sauf si on a des bras de 2,5 mètres de long. OK, OK, mais pour débrancher une prise type 2, il faut appliquer une procédure au niveau de la voiture (clic de clé ou autre) pour qu'elle libère la prise qui est verrouillée. En fait, il me paraît impensable que le chargeur de la voiture crame si le 230V disparaît. Et la libération de la prise type 2 clos nécessairement la session de charge. Là, j'ai plutôt tendance à faire confiance aux constructeurs pour affûter des firmwares plus robustes... @indy49 je mémorise ta remarque, je regarderai ce point particulier.
-
Juste pour être sûr, je crois que le réglage de la s18 doit se faire roue partiellement écrasée à l'aide des butées "officielles" ce qui est utile pour accéder à la chambre négative. C'est comme ça que tu fais ? (car bien sûr la pression évolue en fonction de l'écrasement). Probablement que les spécialistes vont te demander ton poids, ton type de parcours et les pressions que tu as injecté. Bon courage. Et bienvenue sur le fofo...
- 18 réponses
-
- 2
-

-
- kingsong s18
- suspensions
- (et 1 en plus)
-
Débutant en KS14 première grosse chute
Techos78 a répondu à un(e) sujet de Loïc 74 dans Présentez-vous
Salut @Loïc 74 , soit le bienvenu. Par nature, une roue c'est bête, et elle essaye uniquement de rétablir le déséquilibre que tu lui imposes. Et donc, si elle a accéléré, c'est que tu lui as appliqué une pression inadéquate de la pointe de ton pied droit. Sans vouloir être discourtois, il n'est pas utile de culpabiliser la roue, le responsable c'est toi. . Tout cela est très normal, tu es "entre deux âges", il te faut plus de temps qu'un ado pour acquérir le feeling nécessaire à la wheelitude. Te barder de protections peut éventuellement te rassurer, mais c'est pas ça qui améliorera ton style. Il faut pratiquer, pratiquer... sans hésiter à refaire quelques exercices de base, le long d'un mur , en poussant un caddy, avec des bâtons de marche ou autre... 10 jours, c'est rien... on en reparle dans 1000 km... -
Eh bien cette photo m'arrange, ce niveau de détail me suffit, je n'ouvrirai pas mon boîtier pour éponger ma curiosité, qui portait surtout sur les éléments de puissance. Donc, sauf erreur, deux relais (les parallélépipèdes noirs) qui coupent phase et neutre, un gros anneau de ferrite pour filtrer le mode commun phase/neutre, un anneau plus petit pour filtrer la phase, et c'est tout. Le reste : une alim auxiliaire qui alimente un contrôleur qui gère les tests, les séquences, l'affichage, les leds et la liaison série. C'est vraiment le même boîtier que le mien. Je te montre le type de fixation que j'utilise, je n'en tire aucune fierté car elle est très rudimentaire : Donc une plaque en hêtre (bois dur) vernie, fixée au mur par deux vis, comportant deux colliers de plombier diamètre 20 qui assurent la fixation et limite les risques d'arrachement des câbles. Ça tient bien, et le câble reste démontable en 4 coups de tournevis. Dans le même esprit "plombier", le support mural de prise type 2 est constitué de deux réductions 100-80 face à face dans un manchon 100mm, avec un fond pvc : Et pour finir, des supports pour le fil très plats car la porte coulissante doit pouvoir passer devant :




-
Je ne sais pas si c'est de l'abs, je n'ai jamais vu la réponse, et les différentes méthodes de collage que j'ai vu ne m'ont pas convaincu. Mon seul essai : tentative de soudure avec un générateur d'air chaud de précision, et des baguettes pvc = ça ne marche pas du tout.
-
Paaarfait, c'est dingue, je n'ai plus de question . Perso, ma maison est en triphasé, le 32A dépasse ma capacité, le 3x10A serait tentant... mais la Spring est mono, donc walou. Mon abonnement actuel (8 pièces chauffage électrique) est 15kW donc 3x25A. Bon, charger en 16A tarif nuit me semble très suffisant pour mon usage, j'en reste là, je vais juste fixer le câble au mur, la wallbox du pauvre. Il est clair que devoir ajouter des tas de trucs dans le panneau électrique n'est pas évident. Je vais augmenter sa taille en passant à un 4 rangées de 18 modules. Cela me donne l'occasion de tout changer (maison 35 ans), en remplaçant les fusibles par des disjoncteurs + interrupteurs différentiels. Pour les voitures, j'y mettrai aussi un compteur kWh partiel/total, peut-être celui-là : https://www.amazon.fr/COMPTEUR-ENERGIE-ELECTRIQUE-MONOPHASE-MONTAGE/dp/B00DJ7UPMO/ref=asc_df_B00DJ7UPMO/?tag=googshopfr-21&linkCode=df0&hvadid=194939262438&hvpos=&hvnetw=g&hvrand=9549590564592527172&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=9056261&hvtargid=pla-80408374166&psc=1 La RàZ se fait par un bouton infrarouge relativement caractériel, on peut utiliser une petite cuillère comme réflecteur concave. Eh bien on n'a plus qu'à bosser, dans la bonne humeur... en faisant un peu attention à la sécurité. A propos de wallbox : en France, les normes font une fixette sur les fiches et les embases qui doivent être équipées d'obturateurs. Donc les boîtiers muraux équipés d'une prise ou même d'un câble qui pendouille étaient interdits... même en fixant le boîtier au plafond. Cela a changé, désormais les normes imposent simplement un différentiel dédié de type A.
-
Chouette, un utilisateur qui a de l'expérience, merci @LoLoBear . >>> J'ai une question. Il est dit dans la notice du câble qu'il ne faut pas changer le courant pendant la charge, concrètement on modifie le courant uniquement quand la voiture n'est pas branchée. OK, ce n'est pas une grosse contrainte. Je voudrais simplement savoir si on peut brancher d'abord la voiture puis ensuite le secteur. J'ai eu une réponse positive d'un revendeur que j'ai questionné, c'est donc pour confirmer. C'est important quand on passe par un minuteur ou un contacteur Jour/Nuit. >>> Autres questions : est-ce que ce boîtier d'interface chauffe ? Est-ce qu'au démarrage de la charge le boîtier fait un claquement de relais qui se ferme ? Car quand le boîtier est hors tension, il n'y a pas de continuité entrée--sortie (sauf la terre bien sûr), il doit bien y avoir un relais double ou des triacs... >>> Dernière question : sur ton boîtier réglable, as-tu aussi un bouton pour décaler le démarrage d'heure en heure jusqu'à 8, et un bouton pour définir d'h en h le temps de charge jusqu'à 8 ? Bon, cela dépend du firmware de la voiture, pour l'instant cela ne marche pas sur la Dacia Spring... L'avantage de ce câble, c'est qu'on peut le débrancher des deux côtés. Je suis un peu méfiant, je ne sais pas ce qu'il consomme à vide, j'ai vu des wallbox qui vont jusqu'à 5 Watts en veille... Eh non, pour être aux normes, il faut : -- un disjoncteur différentiel 20A -- 30mA de type A impératif -- ou bien un interrupteur différentiel 30mA de type A et un disjoncteur 20A séparé placé derrière. Le différentiel hpi (anti µcoupures) est admis mais non obligatoire. Dans les deux cas, le différentiel est connecté uniquement à la prise renforcée. Pour une longueur inférieure à 20 mètre, le 2,5carré suffit.
-
Grand merci @indy49 pour tes réponses détaillées. Que le système "aimanté" reste d'actualité est une bonne nouvelle, il faudra quand même améliorer sa diffusion et sa documentation... Bah, il ne faut pas se plaindre, la recharge à domicile est possible et c'est l'idéal dans la majorité des cas ... Et j'ai pleinement conscience qu'un câble ajustable en courant est potentiellement dangereux...
-
mettre une baterie plus puissante
Techos78 a répondu à un(e) question de Laurent Pastor dans Questions / Réponses
Salut @venom , bienvenu sur le fofo. Oui, comme cela a été dit plus haut, tu peux mettre une batterie d'un méga Ah si tu veux, il faut simplement : -- toujours respecter les 36 Volts, c'est une valeur nominale car la tension se balade en gros entre 30 et 42 Volts -- et il faut bien sûr que le pack puisse être incorporé dans la trott sans utiliser de can-crusher. Désolé de te décevoir, la valeur 10000 Ah est totalement bidon, les valeurs réalistes sont plutôt entre 10 et 30 Ah. Les randos longues peuvent nécessiter des batteries externes, soit branchées en permanence, soit commutées manuellement. A ma connaissance, il n'y a que la trott Mercane MX60 qui a un pack de batterie amovible. -
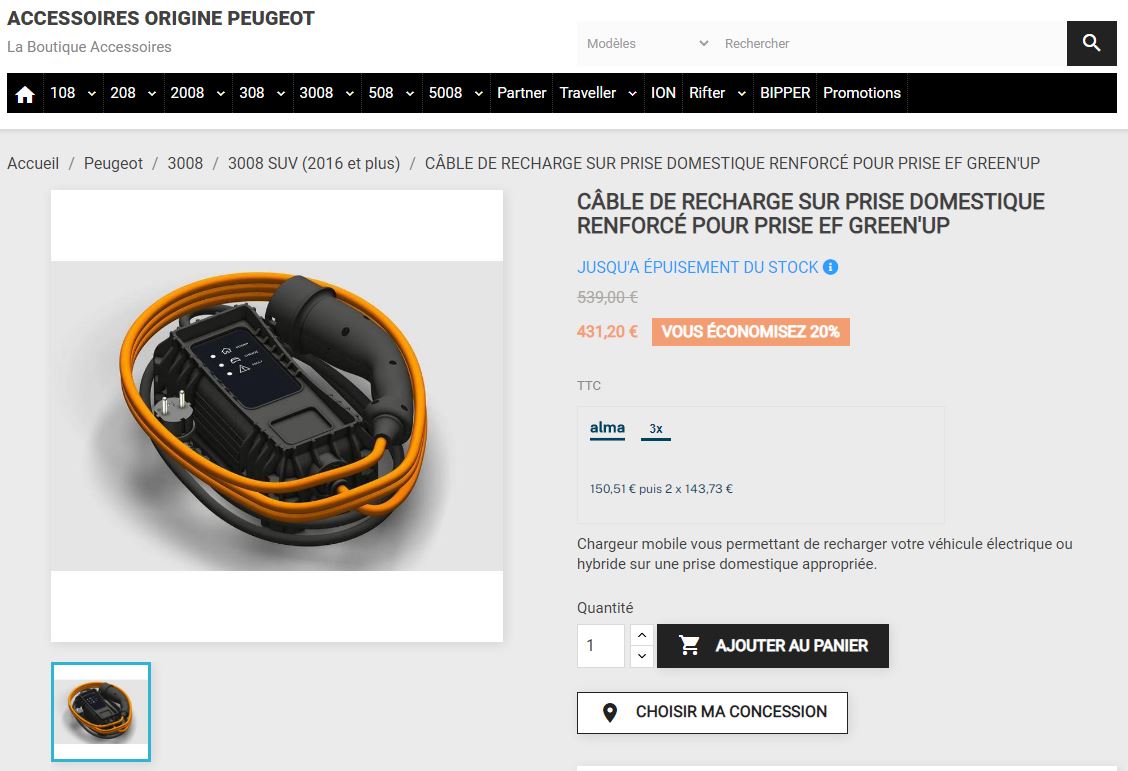
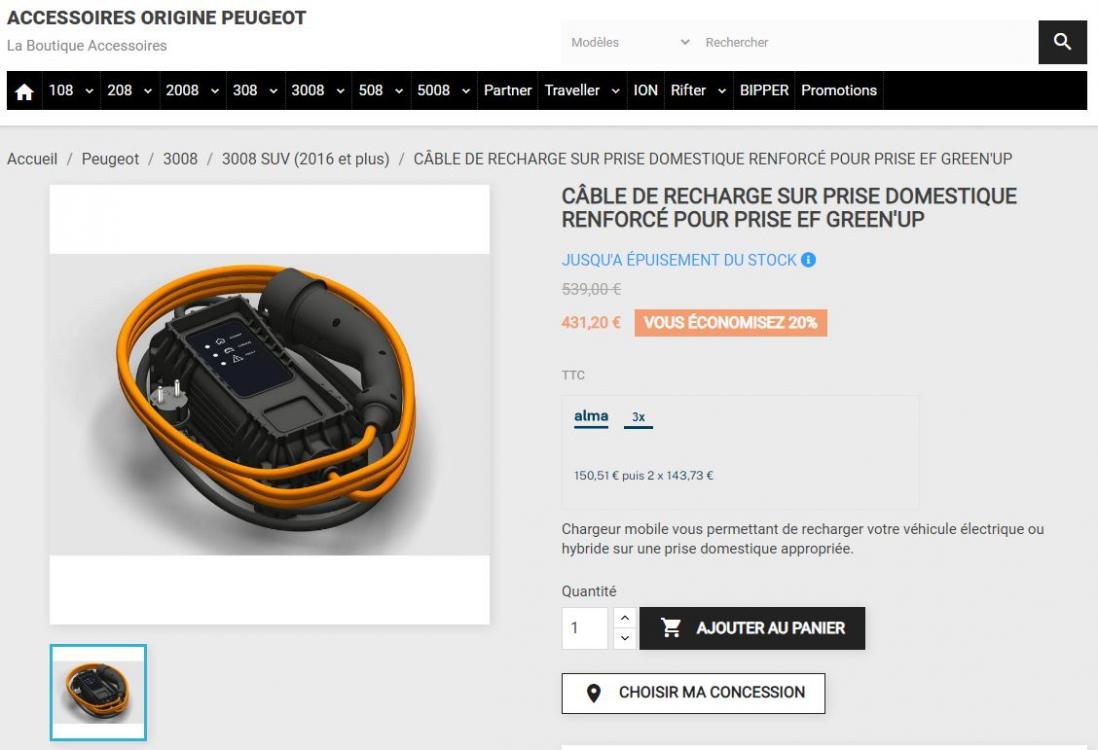
Peugeot semble mieux organisé que Renault/Dacia. D'abord, les sites officiels renseignent sur la double fonction du "câble d'origine" pour prise standard/renforcée : -------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------------------------------------- Cependant, parmi les accessoires d'origine proposés à la vente , il n'y a que le câble pour borne de recharge. ( ? ? ? ) En regardant ce que proposent diverses concessions Peugeot, on trouve un câble qui semble bi-courant pour prise standard/renforcée, mais le commentaire JUSQU’À ÉPUISEMENT DU STOCK est plutôt inquiétant. C'est pour cela (entre autre) que je n'ai pas une confiance aveugle sur la pérennité de cette prise magnétique Legrand, marque réputée... en France. -------------------------------------------------------------------------------------------------------------------------------------------------------- -------------------------------------------------------------------------------------------------------------------------------------------------------- Petites questions en vrac destinées aux initiés : -- les prises "domestiques" qui sont dans les bornes de recharge ou sur certains parkings de supermarchés, sont-elles des prises magnétiques ? -- est-ce que ces prises admettent un courant de 16A, à l'aide d'un câble fixe 16 ou commutable manuellement 6, 8, 10, 13, 16 ? -- y a-t-il un autre fabricant que Legrand qui diffusent ces prises renforcées magnétiques ? -- avez-vous vu sur un site de vente un câble Type 2 , 10A / 16A automatique ? (A l'exception du câble Peugeot ci-dessus) -- avez-vous pris la précautions d'acheter ou de réaliser un adaptateur pour prise "camping" bleue, ou même triphasée rouge ? @indy49 : oui, je lis attentivement tes commentaires. Et pour l'instant cette Spring sera une pochette surprise, mais cela ne me gène pas, les câbles commutables manuellement sont efficaces pour quiconque sait ce qu'est 1 Ampère. Notons que ces chargeurs manuels affichent le courant désiré, et le courant obtenu, j'aime. -- question subsidiaire : qui mesure le courant ? La voiture ou bien directement le boîtier d'interface qui porte l'afficheur ? Si le symbole représentant une pile (à côté de 10A) est correctement géré, cela signifie qu'il y a un dialogue temps réel entre la voiture et le boîtier, via la liaison série. Par ailleurs, il me semble que la voiture peut aussi envoyer un message d'erreur...


-
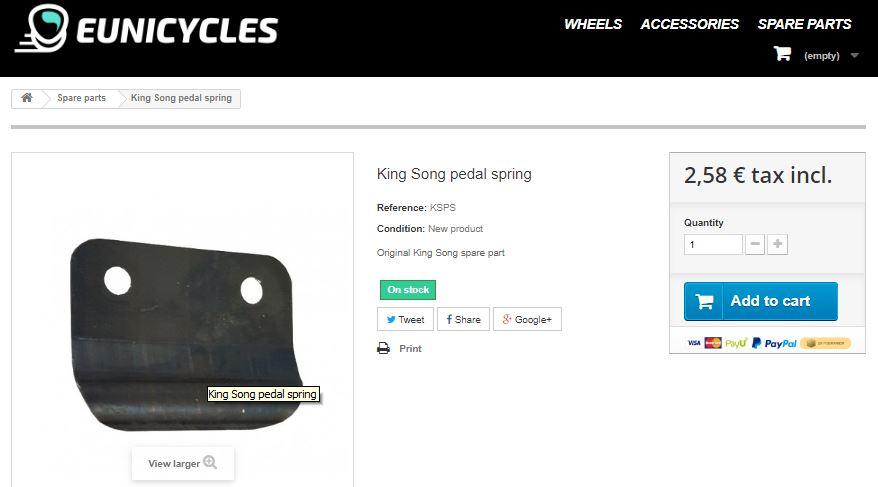
Pour que les pédales tiennent, il faut un ressort en bon état et graissé. Il peut/pouvait s'acheter séparément :
-
Première Gyro et frustrations frustrations frustrations :(
Techos78 a répondu à un(e) sujet de LeKeiser dans Tutoriaux et Apprentissage
HS - une démonstration atroce : vous prenez un chat et, sans lui demander son avis, vous lui ouvrez la tête pour planter quelques électrodes dans un nerf auditif. Pendant quelques jours vous diffusez dans la pièce un top toutes les secondes. Au début, vous enregistrez parfaitement les tops sur le nerf, puis après quelques dizaines d'heures, les tops ne sont plus transmis au cerveau. Ensuite, vous arrêtez les tops et là, vous détectez un signal d'alarme, car l'oreille interne détermime que c'est une "anomalie". Ouais, il y a des gens qui sont taquins... Le corps est bourré d'automatismes, beaucoup dans les tripes à un point tel que certains appellent ça le deuxième cerveau. -/HS -
Toujours à propos de la Green'Up, décidément je n'y comprends rien. C'est maintenant que j'ai un câble commutable manuellement que je vais voir que le câble automatique existe pour la Spring... je suis "tombé" sur la vidéo : qui montre un chargeur clairement automatique, à tel point qu'il existe un gadget aimanté pour pouvoir charger en 16A sur une prise non Green'Up. Le monde à l'envers. C'est peut-être un cas spécial pour les espagnols ou autres, à moins que "mes" vendeurs m'ont raconté des cracks...
-
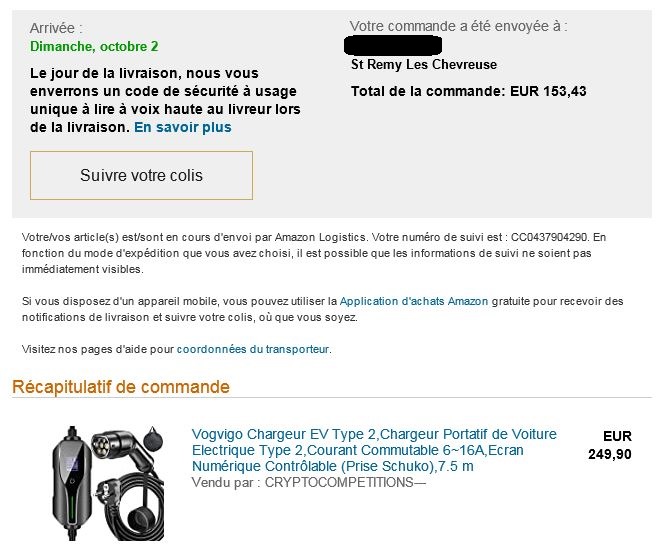
Une compatibilité Green'Up nécessite un câble particulier muni d'un détecteur qui permet la commutation automatique 8A <--> 16A selon qu'on se branche sur une prise domestique quelconque (mais pas trop mauvaise) ou bien d'une prise Green'Up. Il me semble effectivement avoir vu que Peugeot vend un câble à un tarif voisin de 450€, je n'ai pas trop analysé le niveau de compatibilité, le tarif m'a fait fuir... Mais je n'ai JAMAIS dit que Dacia vend un câble compatible Green'Up, ils vendent un câble 16A que l'on peut brancher sur la Legrand pour simplement exploiter sa robustesse. Mais je ne prétends pas avoir fait une recherche exhaustive. Bref. Donc j'ai reçu un câble Type 2 depuis qu'Amazon m'a enfin envoyé un code de livraison. Here it is : Le poussoir sélectionne successivement 6A, 8A, 10A, 13A, 16A, et la valeur sélectionnée reste mémorisée pour le branchement secteur suivant. Quand j'aurais une voiture à mettre au bout, j'espère que la charge démarrera quand on branche d'abord la voiture puis ensuite le 230V, sachant que dans ce cas on ne peut pas changer le courant. C'est indispensable pour un branchement via un contacteur jour-nuit. Dans mon tableau électrique, je pense ajouter un truc dont on ne parle jamais : des parafoudres, dans le but d'écrêter d'éventuelles décharges électrostatiques. Voilà la référence du câble, et vous pourrez aussi voir la super promotion dont j'ai bénéficié :

-
Il est vrai qu'on oublie facilement que lors de la charge, il y a 10 à 15% de l'énergie émise sous forme de chaleur. Que les charges lentes soient moins favorable, je ne sais pas, mais c'est plausible car les rendements des régulateurs de courants à découpage dépendent effectivement du rapport cyclique. Bon, si c'est vrai, on gratte un pouillème, mais on fatigue la batterie... il faut choisir son camp. Le sympathique Electron a mis en ligne une vidéo à propos des recharges voitures : Il a le mérite de réciter tout cela de tête (il a peut-être un prompteur), mais c'est quand même vachement succinct. Encore une fois, dire que la Green'Up charge à 16A c'est confusant : les câbles munis d'un ILS (capteur magnétique) sont quasi introuvables, et les câbles réglables sont nombreux mais mal spécifiés : -- redémarrage automatique en cas de coupure secteur fugitive ? ? ? -- quel courant lors du démarrage : une valeur par défaut ou la dernière valeur choisie ? ? ? -- peut-on recharger en tarif nuit (230V temporisé) Par contre il est souvent indiqué qu'il est impossible de changer l'intensité lors de la charge, ce qui n'est pas choquant. Anecdote : J'ai commandé un câble chez Amazon, hier les livreurs n'ont pas voulu me le donner hier car il fallait que je puisse leur réciter un code, envoyé juste avant, sur un gsm alors que je n'en ai pas. Si ces branquignoles continuent à me faire chier, je vais leur faire un procès, en France le refus de vente est illicite (surtout qu'ils ont accepté mon pognon...).
-
Première Gyro et frustrations frustrations frustrations :(
Techos78 a répondu à un(e) sujet de LeKeiser dans Tutoriaux et Apprentissage
Les mono-roues ont très peu de raideur en cap, ce sont des systèmes résonnants efficaces, et le wobble en est la conséquence. Particulièrement complexe, des tas de paramètres interviennent, la seule certitude c'est que le pilote n'a pas la capacité d'agir intelligemment sur la vibration : détection+analyse+action pertinente nécessitent une bande passante de l'ordre de 25 Hz, impossible pour notre cerveau. ($) On peut effectivement appliquer une "recette de cuisine" qui changera les conditions globales, pour éviter la divergence fatale et si possible faire décroître le binz. C'est chaud et pas franchement convaincant. Je repense à ma dernière descente vers Milon-le-Chapelle, tranquille à 25-28, et vlan, oscillation dingue pendant au moins 150 mètres. Là, j'ai occupé son cervelet par 'je suis mort, je suis mort, je suis mort...", en choisissant différents points de chute les moins désagréables... bon, ça s'est calmé quand la pente a diminué. C'est un endroit que je connais hyper bien, une petite route bombée très pentue avec des vagues lentes dans tous les sens. ($) : nos différents actionneurs (surtout les membres) ont leur propre "intelligence", assez rapide, que l'on éduque par l'apprentissage. Malheureusement, en cas de stress le cerveau essaye de "reprendre la main", ce qui n'est pas toujours une réussite. -
J'ai monté un couineur sensitif ABUS sur mon vtt. Efficace, on peut aussi plugger une chaîne. Il prévient avant de déclencher le vacarme. Plutôt pas mal. Il n'est pas communicant.

-
[Vendu] Inmotion v11: Roulements à billes étanches NKE (50€)
Techos78 a répondu à un(e) sujet de SamSuffit dans Pièces détachées
Pour info : roulements non compatibles v11 batch 1 : diamètre ext = 100 -
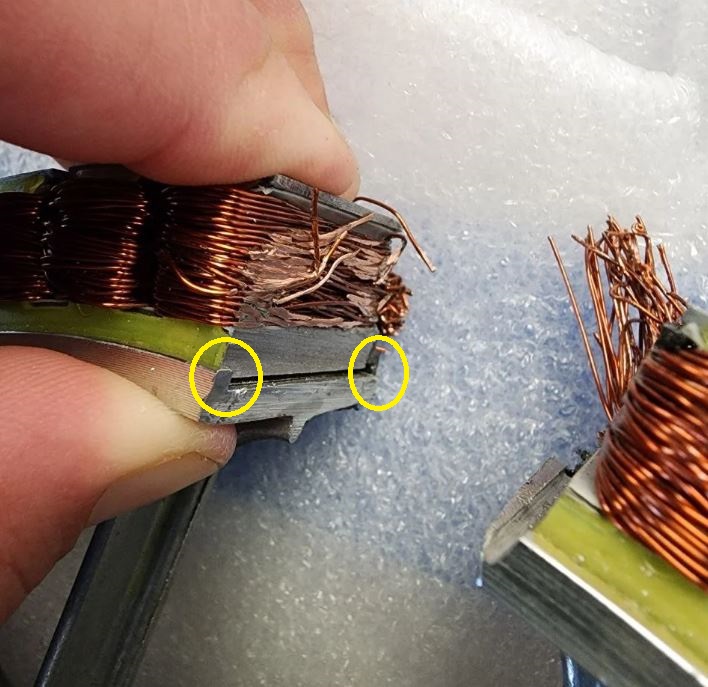
Oui, merci @RolluS , mais... ce n'est pas clair pour moi. La jante est épaulée des deux côtés, ce qui me paraît plutôt surréaliste, une véritable impossibilité mécanique. Je comprends mieux la structure de la s22 qui n'est épaulée que d'un côté (en vert):
-
A ouais ! J'ai vu les mêmes sur un mur d'escalade