
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Certaines peuvent être amusantes. Ma dernière date de 2 heures : le tour du lac de St Quentin, une mare de boue, swiiizzz-splotch, roue couchée et pilote à 4 pattes. Mon pneu slick est une authentique savonnette.
-
D'abord le mot "coupure". Il est utilisé régulièrement mais n'est pas franchement pertinent. Trop sollicité à vitesse élevée, un moteur ne "coupe" pas, il délivre le maximum de couple dont il est capable, et si ce n'est pas suffisant la roue va plonger vers l'avant plus ou moins vite. C'est assez progressif et un bon pilote peut éventuellement récupérer l'équilibre. Comme cela vient d'être dit, cela peut arriver à n'importe quelle vitesse car c'est le couple qui pose problème (excès de courant). A la limite, cela peut arriver en quasi statique si la roue est dans une ornière profonde. C'est d'ailleurs reproché à la s20 par les pilotes les plus intrépides. Les alarmes basées sur la vitesse ont le mérite d'exister mais c'est une indication très approximative, et selon qu'on s'appelle Mimie Mathy ou Teddy Riner , qu'on est en montée ou en descente, vent arrière ou vent debout etc... la seule chose dont on soit sûr c'est qu'on ne peut être sûr de rien. En résumé, la limite c'est le couple. On peut remarquer la limite 3 de certaines begodes, qui couine à 80% de taux de charge moteur. C'est futé.
-

Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
<hs> Oui, c'est un sujet annexe qui ne séduit pas grand monde, mais qui mériterait (?) d'être exploré. Nb de bobinages et nombre d'aimants : comment sont-ils déterminés ? Pour le nombre de bobinages, c'est nécessairement un multiple de 6, bobinés +1 , -1 , +2 , -2 , +3 , -3 , +1 , -1 .... and so on... Pour le nombre d'aimants, nécessairement pair N , S , N , S.... jusqu'à remplir totalement la jante. Si on regarde le très gros moteur de la Monster Pro : Magnifique, n'est-il pas ? Bobinage automatique à spires jointives... cela oblige à quelques épissures pour brancher les pôles en //, mais cela permet de contrôler les flux à la spire près. Ils sont très forts chez Begode/Gotway... Bref. Donc 64 aimants et 72 bobines. Si on calcule le pgcd (plus grand commun diviseur), on trouve 8. Par conséquent il y a 8 fois le même motif ( 8 a et 9 b) répartis sur la circonférence. Et cela définie la résolution de commande de couple [$], qui aura des conséquences sur diverses vibrations ou résonances par repliement de spectre. Je ne doute pas un instant que chaque moteur ait sa propre signature, mais il faut un pilote bigrement sensitif pour faire la différence. [$] mal dit : c'est la position et déplacement du champ tournant qui possède une certaine résolution (mécanique), le couple est contrôlé par le courant selon la résolution (électrique) du pwm. <fin du hs> C'est une valeur plausible, il me semble d'ailleurs avoir vu quelque part que la s20 limite le courant à 240A, mais je ne sais plus où. Les mosfets ne sont pas à la fête .
-
Ça, c'est une bonne habitude, claquer un peu pour bien enclencher les bitoniaux dans les troutrous. Les premières poignées étaient en plastique, et il y a eu quelques casses lorsqu'il n'y a qu'un seul côté engagé. Les distributeurs admettent une ouverture de coque pour accéder au pneu, c'est la moindre des choses.. à condition bien sûr de travailler correctement. En terme de difficulté, la dépose des coques externes d'une 16s est relativement facile, avec un bon tournevis (PH2 impératif). Ne pas bousculer les barres de leds qui sont un peu fragiles. Il faut regarder des vidéos de démontage pour bien voir comment dé-clipser les coques externes.
-
Achat Z10/ vérifier les batteries
Techos78 a répondu à un(e) sujet de Romuald dans Ninebot by Segway
En effet, c'est un excellent signe de bonne santé. Il faut faire un diagnostique à l'aide de l'application bluetooth, car la z10 a des "smart bms" qui donnent toutes les tensions des cellules, qui une fois chargées sont proches de 4,2 Volts. Un petit coup d’œil aussi sur le kilométrage global, et sur l'usure du pneu, celui-ci étant en général relativement fatigué à 10 000 km. La z10 est une belle roue, pas très répandue, son pilotage nécessite un certain engagement corporel, mais en général ceux qui l'ont l'adorent. -
Marty nous fait une boucle rapide de 3/4 d'heure. Pas de souci, ça tourne bien : Le point de vue féminin de Kelly Chameleon et du sauteur exceptionnel Mike Leahy :
-
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
A mon tour de te cirer les pompes : super témoignage @Justin38 . Avec des commandes à modulation de largeur, il y a fatalement des pics de courant sévères, donc des points chauds aux endroits les plus résistifs... J'ai parlé de la faible résistance interne d'un moteur brushless, c'est une évidence visuelle quand on voit des bobinages réalisés avec 10 à 20 fils en main (i.e. en //), le moteur basse tension de la z10 est pire, probablement entre 20 et 25 fils en main. Mais bien sûr, c'est plutôt l'impédance qui dimensionne le courant pic, mais évaluer l'inductance n'est pas trivial. Le nombre de pôles du stator et le nombre d'aimants n'est pas le même, la différence est de l'ordre de 10% dans un sens ou dans l'autre. Cela évite d'avoir un crantage magnétique comme pour un moteur pas à pas. Mais cela signifie que chaque paire de pôles n'a pas la même position face à chaque paire d'aimant... pour faire un bilan de couple, il faut probablement des nerfs solides... -
@ghyzmo08 : ton hébergeur d'images essaye de nous refiler des cookies, c'est un peu cavalier. Dépose-les directement sur le site Espritroue, si possible après avoir réduit leur taille à 200 koctets maxi... merci. En achetant cette draisienne tu n'as pas eu la notice ?
-
Perso, la stabilité du bluetooth de ma P8 est très bonne, la portée est d'environ 5 mètres. Il est possible qu'il y ait quelques interférences selon l'environnement, borne wi-fi, portique de supermarché... Je dis cela parce que je peux rouler 1 heure ou 2 en forêt avec une donnée TOP SPEED parfaite, et quand j'approche de chez moi, blam, la montre me dit que j'ai roulé à ~160 km/h, ce que j'ai du mal à croire. C'est l'écran tactile qui n'est pas terrible, il ne supporte pas l'humidité... Heureusement l'écran principal affiche ce qu'il faut, inutile de modifier quoi que ce soit. Tiens, cela me fait penser que l'heure est décalée de 5mn, il faut que je me connecte sous Chrome, et dans ce cas (?) il est possible qu'il faille presser le bouton ~40 secondes pour établir la liaison, ou bien faire un reset montre...
-
Tu m'étonnes . Bon courage. Pas bête les pédales droite-gauche, pour éviter qu'elles se dévissent... C'est à cause de la précession mécanique, un phénomène pas très connu...
-
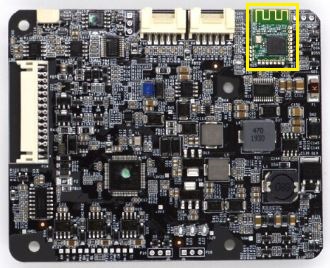
Juste pour info, tu es sûr de ça ? Sur la carte mère z10, je ne vois qu'un seul module bluetooth : Cela me semble comme la v11 qui a un HP mais pas de canal bt audio...
-
Stabilité, mmmhhh, il faut s'appeler Chooch Tech pour éviter que le balancement diverge, à 26:20. Cet excellent pilote est probablement désavantagé par sa cane à selphie de 6 pieds qui le déséquilibre, mais à mon avis il faut se rappeler que par nature une roue n'est jamais franchement stable, surtout en courbe rapide, route ondulée et descente... et quand le pilote est fatigué .
-
Pas vraiment. Le tilt back est ressenti par le pilote comme un relèvement de pédales. Pour générer cet effet, la roue décale son point d'asservissement (par rapport à la verticale apparente), et donc la roue accélère fugitivement pour aller plus vite que le centre de gravité du pilote. Le moteur a besoin d'un supplément de ressources, et s'il est saturé, il n'y aura PAS de tilt back. Même si on limite la vitesse, il faut tenir compte du niveau de batterie, de la pente et de la nature du terrain (un macadam lisse et une pelouse humide n'ont pas la même résistance). Comme cela a été dit, il faut être souple, et ne pas trop fantasmer sur les vidéos youtubesques...
-
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
Il est clair que des capas bien placées sont plus efficaces. Les cm ont des rangées de mosfets, entre deux connexions massives, et il est intelligent de mettre un condensateur à chaque bout pour limiter les longueurs des connexions. Il faut savoir qu'une impulsion est ralentie par cette longueur, qui, même lorsqu'elle est droite, présente une inductance d'environ 30 nanoHenry par centimètre. Mais des capas distantes ne sont pas ridicules, tous les moyens pour stabiliser/lisser la consommation est valide. Il y a toujours le léger souci d'étincelles au moment de la connexion, mais les condensateurs actuels résistent car ils ne sont pas limités en dV/dt . On parle bien de lisser le découpage haute fréquence, car lisser la consommation elle-même nécessiterait des super condensateurs, très efficaces pour les gros courants, mais obligeant à des groupements série compliqués avec un équivalent bms. J'imagine qu'une consommation régulière (pas trop hachée) améliore la fiabilité électro-chimique des cellules... mais je n'en sais rien. Ce sont des sujets que je connais mal, malheureusement il y a peu d'articles de fond là-dessus. Naïvement, je m'attendrais à ce que la valeur soit supérieure pour des roues puissantes, mais c'est l'inverse qui s'est produit ces dernières années, jusqu'à cette s20 qui semble être un peu plus "raisonnable". -
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
IM-V11 : roue 84V : 2 condensateurs 470µF / 100V -
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
KS-S20 : roue 126V , 5 condensateurs 560µF / 160V -
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
KS18S : roue 67.2V, 2 condensateur 2200µF / 80V (ne pas confondre avec la S18) -
Condensateurs de découplage batteries
Techos78 a répondu à un(e) sujet de Techos78 dans Discussions générales
KS16B : roue 67.2V , 2 condensateurs 2200µF / 80V -
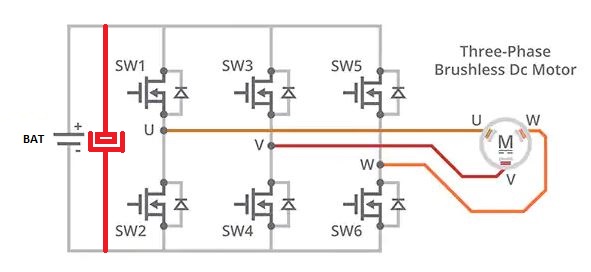
Bonjour à tous. OK, c'est un peu technique, mais je pense qu'on néglige trop ces composants qui sont de plus en plus sollicités mais qui étonnamment ne posent pas de problème (?). Exemple avec une carte mère de sherman : Bon, il faut un peu entrer dans le fonctionnel. Go : Ces condensateurs sont connectés directement aux bornes d'arrivée de la tension batterie, ils ont pour but de "rigidifier" cette tension, c'est à dire diminuer le plus possible l'impédance de source (surtout hf) de l'alimentation qui est fournie aux étages de puissance, c'est à dire aux mosfets. Le schéma ressemble à ça, chaque phase moteur est pilotée par un demi-pont qui la connecte au plus ou au moins batterie. Les mosfets sont utilisés comme des interrupteurs, leur résistance des mosfets passent successivement de quelques dizièmes d'Ohm à quelques MégOhms. Une commande vectorielle sophistiquée gère les 6 signaux. Elle contrôle séparément le courant qui passe dans chaque phase, et l'ondulation triphasée qui commandera la vitesse du champ tournant. Remarque : pour nos roues, il est indispensable de connaître la position du rotor (la jante), 3 sondes de hall sont chargées de cette détection. La résistance électrique d'un moteur brushless est très faible, nettement inférieure à 1 Ohm. Et donc, le moteur est excité en courant, en ne faisant conduire les mosfets que de manière impulsionnelle. Une variation du taux de modulation permet d'ajuster le courant. Lors de sa montée en régime, lorsqu'il est sollicité au max, le moteur reçoit un courant constant. souvent de l'ordre de 20 ou 30 Ampères. Quand un mosfet est passant, il applique la tension batterie moins la force contre-électromotrice. le taux de modulation va donc croître en même temps que le régime moteur pour maintenir le courant. Ce sont les régimes très faibles qui posent problème. Par exemple, si vous voulez 30 A dans le moteur, il suffira peut-être d'une modulation de 10%, mais cela veut dire qu'il passera 300 A en instantané. Les batteries ne le peuvent pas, ce sont donc les indispensables condensateurs de découplage qui ont pour tâche de lisser le courant. Les roues haute tension actuelles me font peur, il semble (?) y avoir une prise de conscience des fabricants, j'ai vu 5 condensateurs dans la s20... Sérieusement, je suis inquiet, un condensateur qui éclate fait de gros dégâts. ------------------------------------------------------ Pour info, si vous avez une carte mère sous les yeux, je propose d'indiquer la valeur des condensateurs. Je commencerai avec ma ks16b

-
Il y a aussi de vieilles cogitations ici :
-
S18 - V11 - Sécurité - Autonomie
Techos78 a répondu à un(e) sujet de Cyrilb dans Discussions générales
Sécurité de l'alimentation : comme cela a été dit plus haut, l'organisation batterie est importante : -- la s18 est en 20s3p, c'est à dire 3 rangées parallèles de 20 cellules en série -- la v11 est en 20s4p, c'est à dire 4 rangées ... La s18 a du mal à fournir un courant instantané important, cela a été nettement critiqué sur le forum anglais, un peu moins ici, mais quand même assez (?) pour que les pilotes attentifs soient au "courant"... La v11 peut fournir 1/3 de courant en plus, la configuration 4p de cellules 21700, 5000 mAh équipe pratiquement toutes les roues haut de gamme actuelles. Naturellement, l'autonomie est supérieure d' 1/3 . Confort de la suspension : de ce point de vue la s18 est plus efficace, c'est toute la coque qui est suspendue, à l'aide d'un amortisseur, alors que la v11 ne suspend que la "selle" à l'aide de deux vérins. Les deux systèmes ont des défauts : articulations et coulissement difficiles sur s18, alors que v11 c'est plutôt un jeu des glissières qui tend à s’accroître. Niveau de batterie : on commence la rando à 83 Volts, on la termine à 66 Volt, sans chercher à être désagréable il faut une bonne dose de naïveté pour imaginer que cela n'a pas d'incidence sur la puissance disponible (proportionnelle au carré de la tension). Mais heureusement toutes les roues surveillent cette tension afin d'appliquer des restrictions de fin de batterie (sonore + tilt back) jusqu'à l'arrêt final en douceur, en gardant un peu de marge pour maintenir l'équilibre du pilote. MAIS : toutes les roues ont leur "domaine de vol", c'est à dire que si on leur impose un choc ou un déséquilibre brutal, elles ne pourront pas nécessairement fournir le couple nécessaire, la roue plonge en avant (c'est parfois rattrapable). Dans ce cas, il n'y a PAS de tilt back, et l'alarme sonore n'a pas toujours le temps de réagir. -
DRAISIENNE E-SLIDE 14" ES1420D . double acceleration
Techos78 a répondu à un(e) sujet de dellamore dans Draisiennes
Une procédure indigne. La pratiquer et la promouvoir est honteux. Espritroue n'a pas vocation a devenir un repère de truands. . -
Non, il n'y a pas de rapport entre le réglage d'assiette d'un drone et l'équilibre physique d'une roue. D'ailleurs, pour un drone on ajuste les accéléro de roulis et de tangage, et on laisse les gyro tranquilles car les rotations angulaires ne servent qu'à la stabilité des asservissements de vol stationnaire et d'attitude. L'électronique de puissance d'une roue crée des variations de vitesse dV/dt pour annuler le déséquilibre pilote+roue. Si une roue sans pilote est balourdée, elle accélérera jusqu'à sa vitesse max, par nature c'est la fonction d'une roue : tant que la roue accélère le balourd est appuyé sur son inertie. L'asservissement gère l'équilibre dynamique, mais pas l'équilibre statique. En résumé, inutile d'attendre qu'un firmware corrige un éventuel déséquilibre, c'est physiquement impossible. <hs> à mon tour de faire du hs : j'ai bossé sur un truc très spectaculaire : l'équilibrage du vol horizontal de l'A380. Il faut savoir que les deux ailerons horizontaux de queue sont reliés à un axe pivotant (inutile de dire qu'il est balèze). La fonction s'appelle poétiquement THS , elle permet au pilote de régler son coucou en vol horizontal selon la charge.
-
Concrètement : (roues équipées de cellules 21700, 5000 mAh) La s18 : 20s1p // 20s1p // ( 10s1p + 10s1p ) = global 20s3p = 60 x 5 x 3.7 = 1110 Wh La v11 : 20s2p // 20s2p = global 20s4p = 80 x 5 x 3.7 = 1480 Wh La Hero : 24s2p // 24s2p = global 24s4p = 96 x 5 x 3.7 = 1776 Wh La s20 : 30s2p // 30s2p = global 30s4p = 120 x 5 x 3.7 = 2220 Wh En fait, je ne suis pas très sûr du nombre de bms de la s18, l'organisation est particulièrement merdique. Vous pouvez demander à @Thy-B ce qu'il en pense .
-
Ce n'est pas nécessaire. Il suffit de tenir la roue verticalement en mode trolley sur sol horizontal, à peine entre le pouce et l'index (ou le long d'une tringle à billes). On voit tout de suite si elle se barre en avant ou en arrière. Le pneu à crampons peut donner un léger effet de crantage. En roulant, il faut un pilote extrêmement sensible, c'est très difficile d'avoir un ressenti correct. A priori la s20 aurait (?) un balourd arrière. C'est moins grave qu'un balourd avant car, quand la roue largue son pilote (ça arrive...), elle pourrait dans ce cas accélérer jusqu'à Vmax. Historiquement, il y a eu surtout la Monster-2400Wh qui posait problème, avec 2 packs d'un côté et un seul de l'autre (+cm), différence = 4 kg. C'était une roue réversible, il était préférable de l'utiliser avec les 2 packs vers l'arrière. Sur s20, si le déséquilibre est modeste, j'ai fait une suggestion pas très chère :


