
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-

Changement de poignee d'accelerateur
Techos78 a répondu à un(e) sujet de Abso89 dans Motos & scooters électriques
L'idéal est d'avoir un voltmètre sous la main. En toute rigueur, les poignées d'accélération, qui utilisent souvent un capteur hall analogique, peuvent effectivement se contenter de 3 fils : le 0 Volt , l'alimentation +5V , et le signal qui varie entre environ 0,5 et 4V selon l'accélération. Les couleurs noir pour le 0V et rouge pour le +5V sont presque toujours respectées, et le signal est quelconque. Et le 4ième fil serait (?) pour la clé, qui établirait un contact avec le 0V.... simple hypothèse. Mesurer l'activité électrique sur les fils me semble indispensable, car si la fonction "clé" a été mise en place en version 3 fils, cela peut être par coupure du 5 V ou bien par une autre bidouille. Ne pas tenir compte de la couleur vert-blanc, qui n'est pas franchement standard. -
Le poids de la roue au sol est sans importance car il n'y a pas de capteur d'effort sur le trolley de la v11, et pas de contact de fin de course de suspension. motor no load : le nom de cette fonction est "confusant". Cela me fait penser à mon ancienne activité (câblage avion), il y a un signal électrique très utilisé par les centrales inertielles (pour changer de mode sol-vol), son nom est presque toujours WOW qui est l'acronyme de Weight on wheels (poids sur les roues), nommé en français "contact train". Je viens de faire soigneusement l'essai, il est exact que quand on soulève soigneusement la roue verticalement, elle garde sa vitesse zéro. Je n'avais pas remarqué, il y a donc une petite zone d'inactivité moteur, ce qui est excellent car cela garantit une conso statique minimale (roue bien verticale). En l'air, la moindre inclinaison crée un démarrage rapide immédiatement coupé, un jingle bizarre est émis par la sono. Voir et écouter à partir de 0:35 : Scrouitch-video . Là, c'est une détection d'accélération élevée associée à une consommation faible qui est une signature de roue libre. @Ibaloo Ce n'est pas la première fois que j'apporte une certaine contradiction à tes propos, il n'y a rien du tout de personnel, je te lis avec intérêt et j'essaye d'enrichir la discussion. En fait, sur ce coup là, je te remercie pour m'avoir fait découvrir cette petite zone aveugle, qui n'existe pas sur les autres roues que je connais. Désolé que ton contact anti-spinning ne fonctionne pas bien, le mien est OK, et même un peu sensible, je le déclenche souvent sans le vouloir, ce qui n'est pas bien grave car la sono est très explicite.
-
La 16s : 2 x 16s2p de cellules 3500mAh = 60V 14Ah = 840Wh. La charge maxi en respectant 0,5C est 14 x 0,5 = 7 Ampères, tolérable par les packs mais pas par le connecteur. Une charge à 4,4 Ampères est correcte. Il faut se rappeler que le mode régénération crée des pics de courants bien supérieurs (charge par la sortie des packs), c'est surtout ça qui fatigue les batteries, Il est conseillé d'éviter les pilotages agressifs et les mouvements pendulaires prolongés. En effet, un peu de douceur n'est pas inutile (comme pour une femme...), Ceci dit, c'est surtout pour avoir bonne conscience, il serait bien difficile de mettre en évidence une variation de fiabilité. Certains disent qu'il faut attendre avant de charger après une rando rapide, en fait ce n'est pas nécessaire pour le Li-Ion alors que c'est indispensable pour le LiPo.
-
Pour info, la v11 détecte les montés en vitesse qui correspondent à la roue hors sol. C'est une option, qui s'additionne au bouton anti-spinning. Ça marche bien, il est possible (?) que KS implémente cette fonction...
-
Pour continuer sur la morphologie, moi je suis étonné que les vendeurs ne demandent pas le poids de leur client pour mettre le bon ressort sur l'amortisseur car Je ne suis pas du tout convaincu que le réglage de précontrainte suffise à compenser correctement la masse 25+60 ou 25+130,.. (j'ai mis 25 car le moteur n'est pas suspendu) +1. D'autant plus qu'avec un trolley décentré, les contraintes de vrillage sont maous.Le trolley à l'avant oblige à un double demi-tour qui n'arrange pas les choses. De ce point de vu, la Hero est préférable. Et puis, il faut aussi penser aux pilotes de petite taille... Les mannequins étalons souvent incorporés dans les cao ont des mensurations variable selon la localisation US, Europe, Chine... , pour l'Europe SolidWorks donne 1,78m.
-
Ça ne m'étonne pas. Cette roue a été dessinée par des petits jeunes qui ne savent pas ce qu'est une amorce à la rupture. En mécanique, il faut souvent des congés, des congés, des congés. (j'en vois qui se frottent les mains, non, non, on parle bien de mécanique) Il y a eu l'épisode lamentable des pédales fragiles qui ont été heureusement améliorées, mais on trouve encore beaucoup de plots de coque plastique qui cassent parce qu'elles ne demandent que ça. C'est nuuuuul, ça m'énerve, d'autant plus que les cao modernes peuvent incorporer des simulateurs qui calculent les contraintes. Bon, je vais me calmer pour retrouver mon niveau nominal de zénitude....... Voilà, c'est fait.
-
On peut toujours essayer : pendant 10 ms on charge, puis 10 ms on décharge... etc... pas sûr que ce soit très efficace... Tiens, un truc marrant : savez-vous que les électrons se déplacent très lentement, à des vitesses qui se chiffrent en centimètres par seconde ? Donc, en l'absence de composante continue, ce sont toujours les mêmes électrons qui chauffent votre grille-pain, Ils sont simplement poussés par une centrale nucléaire située... le plus loin possible. (fin du hs).
-
C'est ben vrai çaaa ! (prendre l'accent bourguignon). Il suffit d'attendre la future roue 220 Volts qui roulera à 150 km/h, elle sortira (?) en fin d'année.
-
+1. J'ai vu ça aussi, je ne suis pas au courant. C'est pour ça que j'ai évoqué la possibilité d'une nouvelle version, incompatible, nécessitant de changer l'ensemble. Cette cassure de poignée n'est pas rare, pour ma part j'ai constaté une certaine difficulté de verrouillage des deux côtés, et j'ai toujours claqué franchement la poignée en la repliant, et en décollant la roue du sol avec une certaine prudence. J'ai assez souvent soulevé la roue sans replier le trolley, ce qui permet de gérer facilement l'emballement. A ce propos, il est possible (?) que le nouveau modèle de poignée comporte un bouton anti-spinning, mais comme KS était plutôt parti sur un capteur d'effort... j'sais pas. Il est probable que tu n'arriveras pas à réparer cette double cassure, d'autre ont essayé, y compris en print-3D. Aucune colle ne semble tenir, surtout pas les colles époxy, relativement solide mais d'adhérence misérable. Bah, ça va te coûter 80€ et un démontage partiel... c'est la vie... Si un membre du forum a une épave de KS16b/c/s, à votre bon cœur, siouplé...
-
Même vidéo que précédemment, mais celle-ci ne saccade pas :
-
Ta poignée est cassée, comme d'hab c'est la partie centrale en plastique qui reçoit les 2 vis : J'ai l'impression que ce modèle d'origine a été changé, il faut probablement acheter la poignée avec les tringles.


-
Non, pas torx, mais allen. Et c'est du métrique, au désespoir des yankees, et ça me fait rigoler car leurs pouces, ils peuvent se les mettre euh, non, je n'ai rien dit. Il faut un jeu minimum car moteur et cm sont mécaniquement séparés, il faut éviter les vibrations (l'équivalent du larsen). Mais ces patins sont volumineux et le plus séparés possible, ça devrait le faire. L'usure dépendra de la matière. Là c'est un noir mat qui ressemble à du polyéthylène (mais ça peut être n'importe quoi), rien n'empêchera de passer à du ptfe ou du composite carbone en cas de fluage ou usure. ma boule de cristal me dit "no problemo".
-
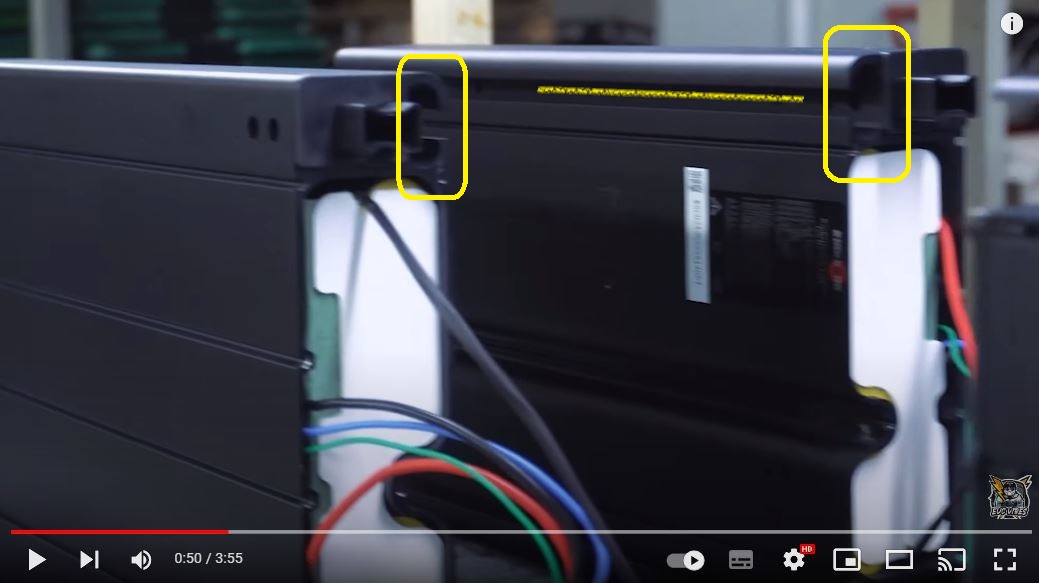
En effet, a priori c'est mieux que d'habitude. Mais les flancs du passage de roue s'encrasseront assez vite, et le re-graissage des glissières imposera une dépose des batteries régulière. Les phases moteur sont connectées à la cm par de grosses pinoches, mais cette cm reste relativement à l'abri, c'est bien. Les batteries ont un nouveau connecteurs 4 points, dans des alvéoles avec joint, et une fois connecté le capot supérieur (afec afficheur) protège tout. Plutôt bien tout ça.


-
Eh bien voilà la réponse à mon questionnement à propos du coulissement de suspension. Donc un système légèrement inspiré de la v11, c'est à dire 4 patins coulissants : Les rails font partie des carters extrudés qui contiennent les batteries : Et il faudra graisser généreusement : Au montage, il faudra enfiler les batteries du bas vers le haut, donc roue couchée. Les batteries ont des connecteurs 4 fils, rangés dans des compartiments étanches, en même temps que les connecteurs d'éclairage. En résumé, une belle mécanique.


-
C'est un peut tôt pour parler de cette montre car elle n'est pas encore disponible. BANGLE.JS 2 Elle pourra être programmée, soit en téléchargeant des applications disponibles (open source), soit en écrivant soi-même le code Javascript. Elle a un cœur Espruino et comporte de nombreux capteurs (y compris GPS). Un seul bouton, écran couleur sensitif. Une bonne autonomie, l'écran est toujours visible, même rétro-éclairage éteint. Elle ressemble aux montres P8, P22 détaillées ici : https://www.espritroue.fr/topic/16585-euc-watch-hackable/ mais elle est vraiment conçue pour être personnalisée, et on peut essayer des routines Javascript sans risque, Pour connecter cette montre à une roue il faudra être un peu patient car @enaon commence tout juste à adapter son programme EUC WATCH. (l'écran carré est moins pratique). Souhaitons-lui bon courage. Unboxing et présentation : Le prix est mal défini, c'est un développement KickStarter qui devrait aboutir au mois de février.... à voir. Cela pourrait être amusant de programmer cet objet, je remarque sur le net un certain enthousiasme...

-
Ce que tu as mis en lien n'est pas un Ecoflow, dont le gros modèle est un peu plus performant : C'est le même essayeur qui compare les deux modèles. Il faut admettre que cela semble idéal pour un camping car. Si ils pouvaient faire la même chose plus petit pour 2 kg.... Un jour peut-être... Edit : sympas les hérissons à 34:40. Chez moi il n'en a pas en ce moment, probablement à cause des chiens et des voitures. Du coup, j'ai un gros stock de croquettes pour chats...
-
La société Ecoflow produit une large gamme de générateurs composés d'une batterie (de secours, ou powerbank) et de différentes interfaces en entrée et en sortie, configurables à l'aide d'une application bluetooth. Voilà un exemple : Il n'y a pas de miracle, plus c'est gros et puissant plus c'est lourd. La qualité semble au rendez-vous. Je ne connais pas. C'est un équipement à la mode, je me demande si les militaire seront séduits, en remplacement de la gégène à manivelles qui a des utilisations diversifiées, relativement "récréatives"... .
-
Oui, avec un bon cache-poussière, Neo arrête même les balles :

-
Il est important de bien identifier l'ennemi de nos "chers" roulements, en regardant cette capture par exemple : On a beaucoup mis en cause les soucis liés à l'oxydation, qui a été avérée dans certains cas, mais @King Size a été un des premiers à évoquer la poussière, et je confirme son analyse. Dans mon cas, au bout de ~6000 km un roulement est devenu bruyant, et après démontage il présentait quelques points durs évolutifs mais pas de trace d'oxydation. L'ennemi principal est la poussière (quand on utilise raisonnablement la roue). Cette poussière fine s'agglomère (collage électrostatique) et s'imprègne du lubrifiant que le roulement transpire. Une fois en place, il faut un brossage doux pour l'éliminer. Le joint proposé m'inspire confiance, et s'il est vraiment en silicone (ou même en néoprène), il devrait résister à l'usage. D'ailleurs, ce n'est pas lui qui va s'user, mais le flasque sur lequel il s'appuie. Il me semble une bonne barrière , le danger serait qu'il capture l'humidité en dessous... auquel cas le trou que j'ai percé dans l'axe pourrait servir (? ?) ... Bien, comme d'hab j'imagine que les distributeurs ne feront pas l'effort d'approvisionner les pièces détachées, donc si quelqu'un voit ça (probablement sur le marché chinois), il ne faut pas hésiter à le dire. Et oui, @Furqo_JQ a raison, IM pourrait respecter un peu ses clients en leur fournissant gratuitement ces joints...

-
Installation de protection roulements :
-
J'ai l'impression que la fixation de la roue est directement accessible de l'extérieur : 4 vis sur le petit axe creux. J'espère qu'il ont eu l'idée de mettre un connecteur intermédiaire pour en faire la roue la plus pratique du marché... J'avoue que les 99 vis à déposer sur ma v11 pour sortir la roue m'énervent un peu.
-
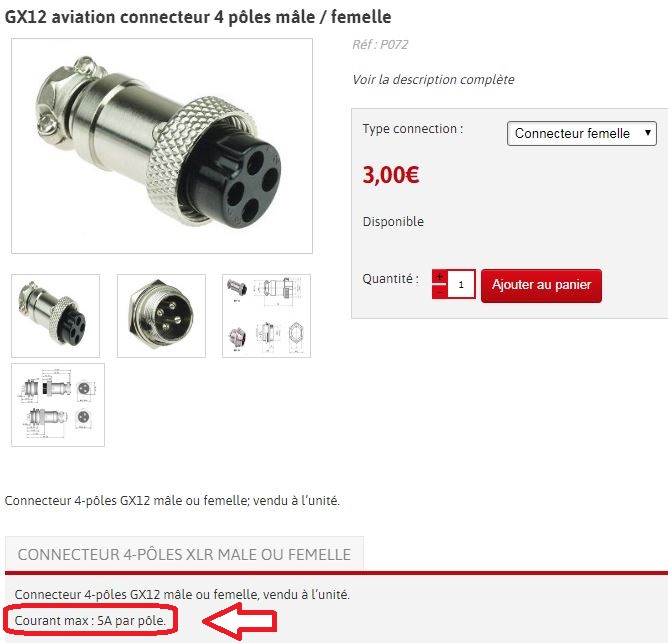
Même un petit GX12 peut passer 5 A : (je n'ai que cette photo sous la main). Mais je crois que sur GW c'est un GX16. Attention, je crois que la nimérotation entre le GX12 et GX16 est différente. En résumé, si tu as la flemme de doubler les broches, ce n'est pas grave. Mais si tu double les pins, il faut le faire avec des petite boucles de câblage et non pas en mettant un pâté de soudure entre broches. En effet, chaque broche doit conserver un peu de jeu pour bien s'aligner.
-
Peut être un futur hit qui fera décoller la wheel....
Techos78 a répondu à un(e) sujet de Harry Callahan dans Le Bar
Le rap n'est pas ma tasse de thé, mais là, le boulot est plutôt réussi, et la brochette de wheelers est sympathique. Wrong Way est un gaillard performant, j'apprécie ses vidéos, il forme un beau couple avec monocat. Son style vocal n'est pas désagréable, il fait partie des "beaux mecs" qui devrait plaire aux filles (?), je trouve simplement que son physique ne se distingue pas assez de Justin Timberlake, qui a l'avantage d'être bon danseur, mais qui est peut-être nul en e-roue. Ben oui, il y a de la concurrence dans le show-biz. -
Bonne vente @db77 , quand tu te gamelles, tu ne fais pas les choses à moitié. A peine plus chère qu'une paire de pédales à clous, c'est très honnête. Juste un très très petit détail sur lequel je fais une fixette : attention au bouchon métallique sur cette GW : en l'engageant de travers on génère le fameux "toro de fuego", très apprécié par les espagnols... Juste une question de temps...
-
Il n'y a pas que le souffle aérodynamique, car en fonction du cube de la vitesse air le pilote doit changer de position, c'est a dire + ou - déplacer son centre de gravité par rapport au contact sol. Un pilote sensible "mesure" ses angles corporels (surtout chevilles), la pression d'avancement (surtout poitrine et tête), l'effort des orteils qui génèrent le "point d'appui" qui fait avancer l'engin (action-réaction). Le vent crée donc un biais dans le contrôle en tangage, c'est l'équivalent d'une verticale apparente, et c'est l'écart par rapport à cette position qui contrôle l'accélération.



