



Techos78
Membre
-
Inscription
-
Dernière visite
Tout ce qui a été posté par Techos78
-
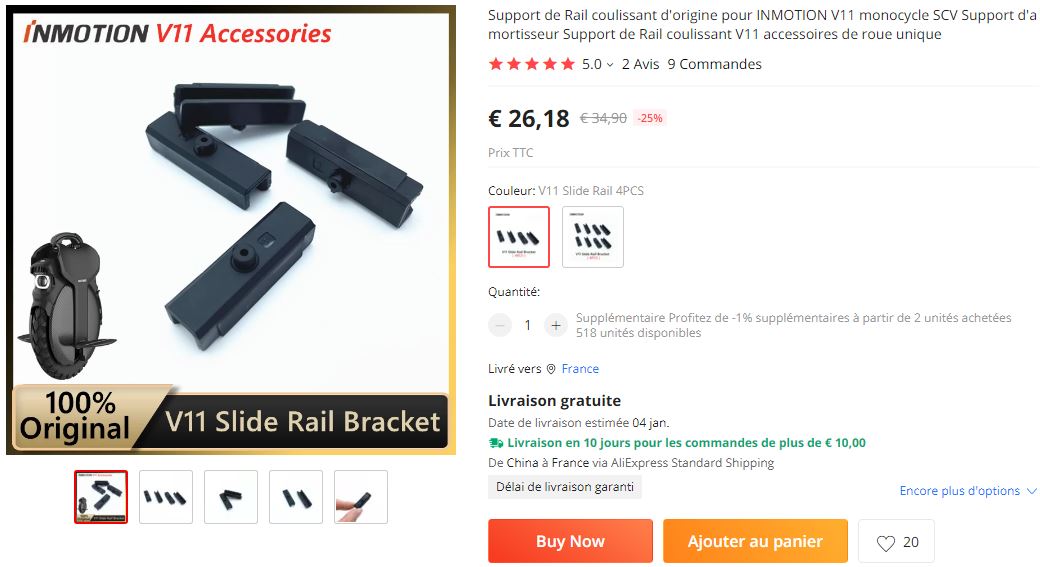
Le type de matériau n'est pas connu. C'est noir, très rigide mais pas cassant car cela accepte la petite vis Parker de fixation. Cette pièce est moulée par injection. Cela pourrait être du PBT (polytéréphtalate de butylène), du Nylon-6T, ou autre, éventuellement chargé carbone... Et elle coûte bonbon : Attention : curieusement cette pièce n'est pas symétrique, il faut donc être vigilent au montage.
-
Question : " comment fait-on pour rouler droit à vitesse constante, pilote immobile sur une route bombée ? ". Notre corps le sait (apprentissage), mais pas forcément notre tête. La réponse est souvent : on incline la roue vers l'aval. Tous les pneus ont un profil convexe (+ ou - rond, triangulaire, carré) ce qui a pour conséquence un certain "engagement" quand la roue n'est pas normale au plan route. La surface de contact pneu-route est sensiblement elliptique, mais quand la roue est inclinée en roulis les bords latéraux de cette ellipse ne correspondent pas au même diamètre de pneu. La surface de contact génère une torsion dans le sens de l'inclinaison. En fait, un pneu est toujours survireur. Ce n'est pas un inconvénient, on en a un peu besoin, mais pas trop. En dévers, l'idéal serait un survirage qui compense exactement la tendance à descendre la pente, une neutralité parfaite... l'Arlésienne. En mono-roue, il s'agit de trouver le meilleur compromis de pneu avec profil + raideur + gonflage qui corresponde au feeling du pilote et à son activité, lors des virage rapide, dévers, boucle courte. Si le compromis idéal existait, ça se saurait.
-
En effet, le jeu des glissières de suspension peut poser problème... il y a un topic à ce sujet : https://www.espritroue.fr/topic/17065-v11-jeu-suspension/ On peut faire un rapide bilan du truc (roue sans pilote) en poussant avant-arrière en tenant la roue par la poignée. Ce test est un peu méchant car on applique l'effort assez loin des tampons coulissants, et aussi parce que les tampons supérieurs sont à moitié sortis des rails à cause d'une erreur de conception qui, il me semble, n'a pas été corrigée.
-
Vérifie si la vis du centre (celle qui bloque l'axe) est serrée fortement, c'est obligatoire. Si ce n'était pas le cas, et qu'après serrage les pédales ont du mal à pivoter, c'est que les vis de bouts d'axe sont trop serrées, il faut les démonter et vérifier l'état des tampons cylindriques et ajuster le serrage pour obtenir une rétention correcte. Mettre impérativement du frein filet sur les vis de bout d'axe, et si possible mettre un peu de graisse entre pédale et axe, mais sans que ça déborde sur le bout d'axe (c'est difficile). En résumé : -- l'axe est maintenu dans le support pédale par la vis centrale -- les pédales pivotent autour de cet axe -- 2 vis d'extrémité solidaires des pédales (frein filet) compressent des tampons qui freinent le mouvement. Perso, je trouve ce système excellent, d'autant plus qu'il n'est pas nécessaire de le démonter puisqu'il suffit de déposer les supports pédales. En 13000 km, je n'y ai jamais touché, la rétention est stable et le jeu anecdotique.

-
Je ne connais pas cette roue, donc ce que je dis est sous réserve. Il y a des discussions pour les roues Inmotion qui ont un système de fixation pédales à l'aide de deux vis de bout d'axe et d'une 3ième vis (pointeau ou cuvette) destinée à bloquer l'axe, sachant que les bouts d'axe sont équipés de tampons servant à contrôler la friction Comme j'ai vu le trou ici : J'ai supposé que ce trou est fileté et destiné à recevoir la vis sans tête pour bloquer l'axe. Donc on ne parle pas de la même vis, les deux partagent étonnamment le même point d'entrée.

-
Ma non-calibration est importante, un peu plus de 2 Volts, la carte mesure 86V au lieu de 84V. Sachant que le seuil d'alarme est à 85 V, il faudrait que j'attende plusieurs semaines pour que la tension descende de 1 Volt. C'est d'ailleurs une qualité : l'auto-décharge de la v11 est faible. Solution bestiale et risquée : appuyer fortement le pneu contre un mur pour créer un gros courant qui fait chuter la tension, mais il faut éviter de faire ça contre sa maison à cause d'éventuelles virgules de gomme brûlée. La manipe est simple car la roue est au tilt back/front maxi.
-
Tssss, ce n'est pas un bouc, c'est un bélier. Et un bouc ne fait pas des bouses mais des crottes.
-
Oui, le mode veille consomme un petit peu et la tension finit par descendre. On peut aider en allumant le phare, ou bien en appuyant le pneu contre un mur. Actuellement je ne charge jamais à fond : j'ai descendu la tension du chargeur... je ne me fais aucune illusion sur la fonction équilibrage. @King Size : ouais, c'est pas la joie. On sort d'un sav et le matos ne marche pas. Quelle époque !.
-
A priori oui car je ne sais pas si les sav savent faire... je découvre le problème, j'imaginais qu'il existait une appli sav pour la calibration des mesures et l'harmonisation des accéléros roulis et tangage, mais cela semble (?) se faire par liaison téléphonique... Le sujet est hyper fumeux, je vais créer un topic spécifique... Il y a deux catégories de personnes : ceux qui ont de la chance, et les autres. Je fais partie du deuxième groupe : ma carte contrôleur d'origine mesurait une tension environ ~1V trop faible, et maintenant la nouvelle mesure ~2V trop fort. J'avais un manque d'autonomie, et maintenant j'ai une impossibilité de démarrer après une charge complète. Clairement Inmotion ne calibre pas ses cartes à l'usine, ce sont d’authentiques charlots qui se contentent d'espérer que les tolérances gaussiennes seront favorables... J'ai bien envie d'utiliser le mot scandale.
-
Dans un topic v8f, le gars @genialmaniac m'a filé un tuyau en or pour résoudre mes soucis de refus de démarrage v11 : https://forum.electricunicycle.org/topic/12053-battery-wont-charge-past-91/page/4/ :
-
Merci @genialmaniac , ton lien est tout simplement parfait. Je le duplique en français :
-
Si tu as réussi à garder ta ks16b (800W) pendant 6 ans, c'est que tu n'est pas vraiment un speedy déchaîné. (euh, 20km, c'est sûrement une 420 Wh) En roue relativement classique et pratique avec laquelle tu devrais tangenter les 80 km d'autonomie, la v11 est un choix raisonnable. Perso, les nouveaux monstres hyper véloces ne me tentent pas, une roue 84V est suffisante pour wheeler à 45 km/h. La suspension, de qualité moyenne, digère plaques d'égout et ralentisseurs, c'est très sécurisant. Juste un avis, 13000 km au compteur.
-
Tiens, tiens, tiens, voilà une phrase que je n'avais pas remarquée et qui m'interpelle puissamment. Quand j'ai récupéré ma v11 (from e-roue shop) suite à un cramage (de routine?) de la carte contrôleur (pas la carte puissance), après charge batterie la roue refusait de m'accueillir à bord à l'aide d'un fort tilt back/front accompagné d'une vocifération oiseuse de type "casse toi tu pus". Après analyse, j'ai vu que la carte mesurait plus de 85V, je me suis contenté de diminuer la tension du chargeur à 82 et des poussières. Je n'ai pas perdu en autonomie car le seuil bas réel est aussi vu de manière optimiste. Donc les SAV Inmotion ont une appli pour calibrer la tension mesurée par la carte. Est-ce que le constructeur, le distributeur, le sav prennent le temps de charger à fond avec un chargeur étalon pour régler pile poil le 100% ... euh, je suis un peu dubitatif. Edit : mais les nouvelles appli clients ont peut-être la fonction... quelqu'un sait ? Et il ne faut pas confondre la calibration de l'appli et la calibration de la roue (qui déclenche les alarmes).
-
Ta roue neuve est complètement hs , ou pas ?
-
Critiquer les power-pad, comme étant un effet de mode ou un syndrome mouton-panurgien ? Oui, tu risques l'opinel entre les omoplates Perso, jamais testés, je n'en ressens pas le besoin, sauf dans les montées longues, ou pour appuyer la roue contre un mur. Mais je testerai peut-être un jour les bandes de mousse (amazon) en partie haute pour ajouter du grip juste sous le genou, la selle v11 est idéale pour ça. Le besoin est d'entraîner la coque en serrant les jambes uniquement si nécessaire, . Oui, les power pads servent à ça, mais si la route est ondulée verticalement les jambes fléchies ajoutent des sollicitations moteurs parasites. Et des power pads trop bas... ça ne sert à rien.
-
Les russes EUC YOU fabriquent de nombreux supports pédales de diverses longueurs , et si j'ai bien compris, quand ils disent par exemple -30mm , c'est que les pédales seront 3cm plus hautes. Donc là il s'agit de porte-pédales 20mm qui abaissent le pilote de 2cm. Par rapport au support d'origine : on voit effectivement que les pédales seront surbaissées. Le nouveau support n'est plus évidé, mais comme il est plus court la masse ne devrait pas trop évoluer. Je vois quelques inconvénients : -- le gros trou de fixation sur la tige de fourche n'est plus débouchant, la tige sera donc pincée avec moins d'efficacité et les deux vis subiront un effort accru, dû au raccourcissement du bras de levier par rapport à l'extrémité de tube. -- les deux lamages des trous de ces deux vis empiètent sur la surface de contact du talon de la pédales. C'est critiquable car la pression de contact est énorme à cause du bras de levier court entre l'arrête basse de cette surface et l'axe pédale. -- D'aspect, le traitement de surface ressemble à de l'alodine 1200 ce qui serait franchement insuffisant pour des pièces soumises aux intempéries. Une oxydation anodique me semble indispensable, quelle que soit la couleur. Précédée peut-être un billage pour velouter la surface et casser les arrêtes. NB : toutes ces fixations traditionnelles de pédales ont un défaut rédhibitoire : le trou d'axe s'ovalise et la pédale prend du jeu après quelques mois d'usage. Je remarque cependant (sur ma v11) que la présence de la 3ième vis qui bloque l'axe minimise grandement cette prise de jeu. Mais ici, cette 3ième vis est en dessous et donc l'axe aura tendance à jouer à la balançoire, et pourra peut-être se tordre...


-
HS -- Salut @Pat75 , bien qu'elle soit explicite, je ne connais pas cette expression de métallurgie/sidérurgie. Les défauts de l'acier les + courants : - en inclusion interne : paille (impureté) , soufflure ou piqûre (bulle gaz) - en dislocation interne/externe : fissure , tapure - en défaut externe : épaufrure , entaille , crack - ... Tu confirmes ton expression ?
-
La bonne habitude quand on monte un pneu (jamais à la graisse) : on gonfle pour que le pneu prenne sa place (la chambre est éventuellement étirée au niveau des flancs), puis on dégonfle complètement pour libérer les contraintes de chambre, puis on regonfle au nominal.
-
Euh, il est partie , partis , parti...
-
hs -- a priori (ce fut mon cas), les roulements v11 mouraient (i.e. devenaient bruyants) le plus souvent à cause de la poussière. Mais l'eau pouvait aider à déplacer la poussière, par exemple lors de la dépressurisation du moteur lors du refroidissement. Euh, tu devrais consulter un toubib
-
Allons don' comme dirait un canadien, ce n'est pas la première fois que KS fait ce genre de connerie. Vous confirmez ?

-
Bonjour Thomas, bienvenu sur le forum. Juste une question : tu es sûr de ne pas trop taper trottoirs et nids de poule ? Car c'est radical pour pincer la chambre et donc crever quand on n'est pas hyper gonflé. J'imagine qu'en trott' on doit pouvoir sauter de l'avant, mais l'arrière doit déguster un max. On a moins de pépins sur nos e-roues grâce au pneu de gros diamètre.
-
Elles arrivent, elles sont là :

-
Sauf erreur, on peut effectuer une règle de 3 multiple quand on sait que pour monter 75 kg à 1 mètre en 1 seconde il faut 736 Watts (c'est la définition du cheval vapeur). Donc pour pilote 110 kg + roue 20 kg , pente 25 % , vitesse 15 km/h ( 15 x 1000 / 3600 = 4,17 m/s ) , il faut : 736 x ( 130 / 75 ) x ( 4,17 x 0,25 ) = 1330 Watts -- les parenthèses ne sont pas nécessaires Là, pour simplifier les 15 km/h sont la vitesse horizontale. Cette puissance est uniquement consacrée à vaincre la gravité, il faut additionner la puissance nécessaire pour rouler, on peut pifomètrer une consommation sur plat de l'ordre de 14 Wh/km à 15 km/h, il faut 14 x 15 = 210 Watts , ce qui fait un total de 1540 Watts strictement nécessaires. La puissance nominale consommée (i.e. à mi-batterie) de la v10F est 2000 Watts, on peut pifométrer un rendement de 80% donc 1600 Watts mécaniques disponibles. Bilan : oui, la v10f satisfait (tout juste) l'objectif. Remarque : une pente de 25% sur 200 mètres est exceptionnelle, perso je n'ai vu ça qu'en Norvège et dans des îles volcaniques.
-
Quelques phrases cultes, exemple : Il faut annuler le cassoulet Poulard, ça vous fait crever tôt ou tard...


