
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-

comment brancher un contacteur clé sur nanrobot D5
Techos78 a répondu à un(e) sujet de al-33 dans Bob la Bricole
Salut @al-33 A priori, électriquement ton engin 52 Volts, 2400W. Cela veut dire que le courant atteint presque 50 Ampères. Comme il est très peu probable que ton contacteur puisse accepter un tel courant, tu ne pourras pas "couper" la liaison de puissance (la sortie de batterie), de toute façon amener des gros fils au guidon ne serait pas raisonnable. Donc il faut agir sur un signal à l'entrée du contrôleur. Là, c'est l'aventure, rien n'est standard. Dans le meilleur cas, tu peux avoir des entrées qui ressemblent à ça : Là, le 1 fait l'affaire, tu devrais pouvoir brancher ton contacteur dessus, j'imagine (?) que quand le contact est ouvert c'est ON et quand le contact est fermé c'est OFF.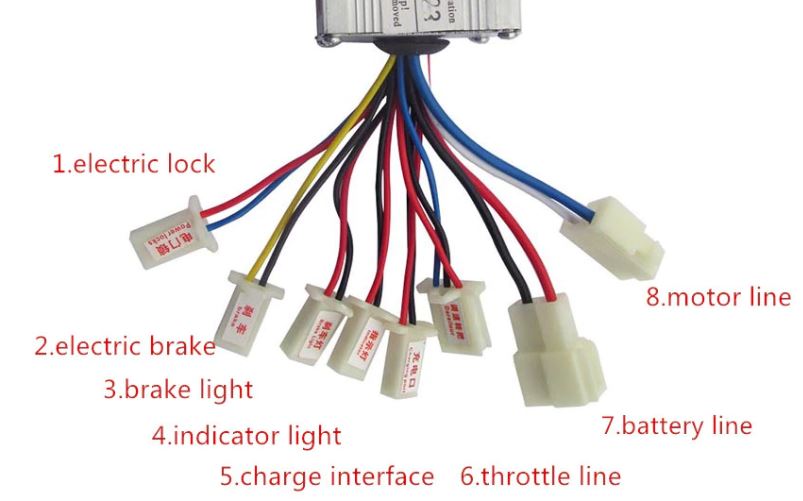
-
Comme le dit @Ibaloo on pourrait souhaiter un cabrage des pédales pour améliorer le freinage. Je ne suis pas contre, j'aime plutôt le "dur" mais j'ai une conduite "3ième âge". Alors, pédales oscillantes ou inconditionnellement horizontales ? Le mieux est d'avoir le choix. J'observe que les ninebotistes Z10 ne sont pas très fans de l'aide au freinage qui leur est proposé, il faudrait faire un sondage. Pour un freinage extrême, la Sherman cabre un peu, ~5° ? : Ceci dit, je ne suis pas sûr que ça change grand chose.

-
Naturlich, puisque tes autres roues sont des 16". Il est indispensable de comparer ce qui est comparable. A ce propos, je me fais un peu de souci pour la GW Monster pro, je me demande jusqu'où on peut aller trop loin...
-
Content que tu sois content. Tu passes de 16" à 18", qui nécessite plus d'engagement du pilote, je pense qu'il faut s'entraîner aux freinages sévères en prenant la position "assise". Les pads peuvent aider. <hs> ça me rappelle un peu, il y a un siècle, quand je descendais en marche des bus à plateforme, se laisser tomber en arrière, juste ce qu'il faut... Newton est fortement impliqué : la gravité (loi universelle) lutte contre l'inertie (1ière loi)</hs>
-
DYU de FWheel (E-Slide, Takara, MoovWay...)
Techos78 a répondu à un(e) sujet de sbouju dans Draisiennes
Ce Kugoo-B2 est donc exploitable, c'est parfait... à ceci près qu'il n'est pas légal (car "trop" puissant) ... et en version draisienne c'est pire. Cette version longue permet une tige de selle longue. J'ai quand-même du mal à faire confiance aux soudures (jaune). Et la boucle du câble de frein (rouge) crée un gros "tirage", j'envisage une sortie latérale plus directe (bleu). Et bien sûr il faut ajouter un connecteur au niveau du moteur, c'est indispensable pour pouvoir sortir la roue arrière sans souci.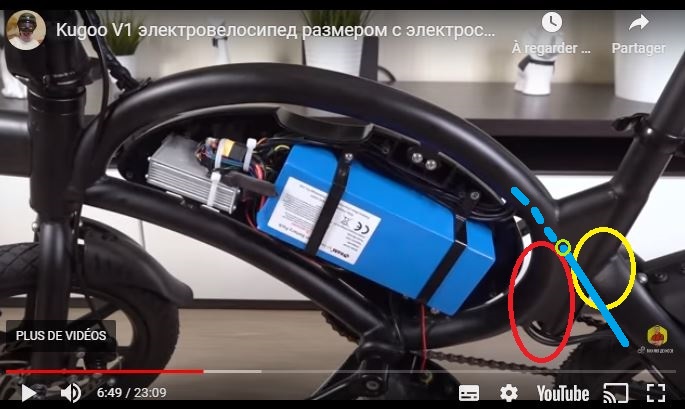
-
On peut aussi stocker sa roue... au fond de l'eau :
-
@mistershaka : si tu changes les roulements toi-même, je viens de voir une vidéo étonnante : extraction au chalumeau sur une Gotway : Edit : il faut admettre que ce roulement est impressionnant et inhabituel. Ça ne m'étonne pas qu'il coûte 200€ !.
-
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
https://www.youtube.com/watch?v=TWPWW1qlkVs -
DYU de FWheel (E-Slide, Takara, MoovWay...)
Techos78 a répondu à un(e) sujet de sbouju dans Draisiennes
Oui, on retrouve des clones dyu chez kugoo, en version B1 courte 12" et B2 longue 14". Dommage que kugoo ne propose pas un B3 avec la fourche télescopique. Le Kugoo B2 est sympatique, 48V est une bonne idée et doit rendre cet engin exploitable, surtout que c'est un vrai 48V, donc une batterie 13s, et non pas un 12s comme on voit parfois. Mais avec 400W je pense qu'il faudrait ajouter un gyromètre anti-wheeling parce que la structure est un peu piégeuse. J'ai toujours dans l'idée de passer mon dyu en 60V, éventuellement en rebobinant le moteur en version high torque, mais c'est un tel boulot que ... peut-être un jour... -
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
Juste pour info, avec cales quel est (à la louche) le sag ... 30%, 50%, 70% ? Ces cales permettent de régler les pressions + et - aux valeurs préconisées par ks. Mais on peut aussi faire des réglages sans cales, suspension dépliée comme pour la v11, en gonflant d'abord la chambre + puis la -. Bien sûr ces deux valeurs "à vide" sont différentes de celles avec pilote, il faut donc faire une correspondance. Je m'étonne que personne n'ait essayé de tracer quelques abaques, par flemme ou parce que c'est difficile ? -
? ? mystère... Je crois que la z10 a une option "aide au freinage", essaye de programmer puis déprogrammer ce truc au cas où le paramétrage ait évolué... mais ça n'a pas de rapport avec l'éclairage, qui fait davantage penser à une panne électrique, une alim auxiliaire qui s'écroule ou autre... Bon courage...
-
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
Oui, c'est un vrai problème, qui m'a conduit à [quasi] blacklister ks , nonobstant mon intérêt pour le matos. Après réflexion, j'entrevois l'ombre d'une possibilité d'un quantum de circonstance atténuante : la fiscalité, qui est différente selon que la production est exportée ou non, ce qui justifie partiellement certaines formes de localisations Chine-EU-US etc. Si j'ai bien compris, le matériel exporté est peu ou pas taxé (au départ), et la Chine laisse les intermédiaires se débrouiller avec les taxes douanières et taxes à l'arrivée. Par contre, leur marché interne est bien sûr taxé, et ce doit être un sacré cirque comptable pour tracer les flux... -
La cause primaire des incidents de transport n'est pas toujours dû à la batterie. Il y a eu au moins un cas de mise en route d'une roue dans son emballage, ce qui a provoqué la destruction des étages de puissance, à cause de la roue bloquée. Certaines roues récentes sont livrées en mode antivol (qui nécessite une appli pour débloquer...), soit un mode veille particulier, qui impose une séquence de réveil. Certaines roues sont assez sensibles aux ondes électromagnétiques, un simple portique de supermarché peuvent les faire réagir...
-
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
Peut-être, peut-être... cependant, le langage R2D2 nécessite un apprentissage, et je n'ai toujours pas vu où est le dictionnaire adéquat. Une question au hasard : >> Quand ma 18s me dit "your device has low battery, please charge it" , la s18 elle dit quoi, mmmh, elle dit quoi ? En effet. La règle : on prend A0 qui fait 1m2 avec ratio √2 et on coupe successivement en 2 pour avoir A1, A2...etc. -
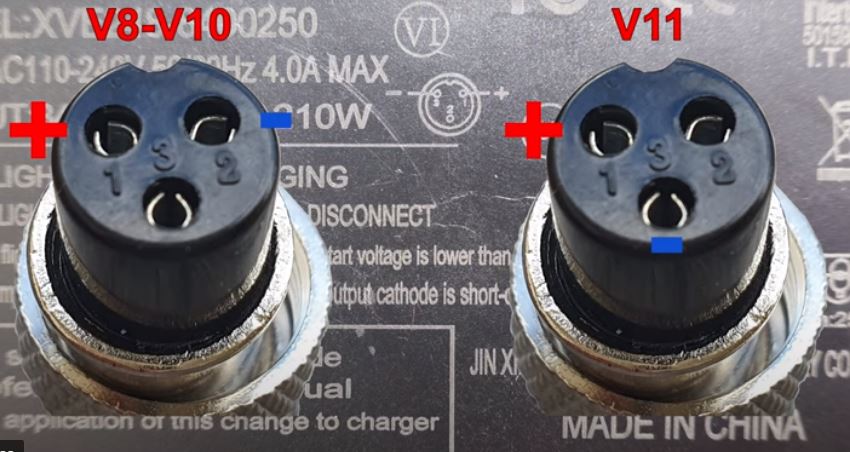
Si quelqu'un a envie de relier les broches 2 et 3, il faut le faire avec une petite boucle de câble pour laisser les douilles libres dans leur logement. Piège : attention à ne pas confondre le brochage des GX12 et GX16. Fiche/embase/mâle/femelle... Murphy a beaucoup disserté là-dessus... Wikipédia aussi. Edit : je n'ai pas dit que c'était "souhaitable" de relier ces broches, car il faut être sûr que chaque roue n'utilise que 2 fils. Moi, je n'en sais rien.
-
La neige, ça va à peu près, mais la glace, même un bon pilote ne peut pas s'en sortir. Exemple : Il faut passer au pneu à clou, ce qui est faisable... en DIY uniquement.
-
Quel achat premiere trottinette ?
Techos78 a répondu à un(e) sujet de jéjé72 dans Discussions générales
Salut @jéjé72 , tiens, pour être sympa, achète une Mercane MX60, et dis nous ce que t'en penses Personne ne l'a, personne ne l'a vue, une grande première... et tu deviendras instantanément célèbre Je n'y connais strictement rien, mais elle me semble sympa... -
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
Juste une remarque, si vous avez le choix, prenez plutôt l'inox A4 plutôt que A2, c'est mieux pour l'extérieur et le maritime. -
Il n'y a que le courant qui intervient dans l'échauffement, pas la tension. Ce n'est pas par hasard qu'EDF transporte son jus en haute tension. La puissance dissipée est de la forme RI2 , quand on augmente la section du fil on diminue la résistance R.
-
Oui, une conso entre 16 et 18Wh/km est classique en urbain, pour un "petit" 18-20 de moyenne roulante. C'est ce genre de chiffre qu'on atteint grosso-modo lors des randos tranquilles. Il y a une foultitude de 'range test" qui montrent que pour des allures plus soutenues (25-28), ou parcours plus chahutés, une conso supérieure à 22Wh/km est fréquente, là encore c'est classique, pour toutes les roues 18". Je tiens à dire que l'autonomie relativement modeste obtenue par @King Size n'est pas en rapport direct avec sa masse corporelle, mais c'est un intrépide qui mouline grave, et je conseille de serrer les orteils (et quelques sphincters...) quand vous le suivez (vécu...).
-
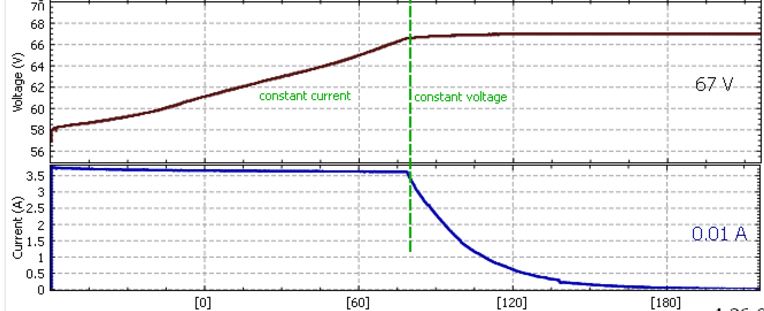
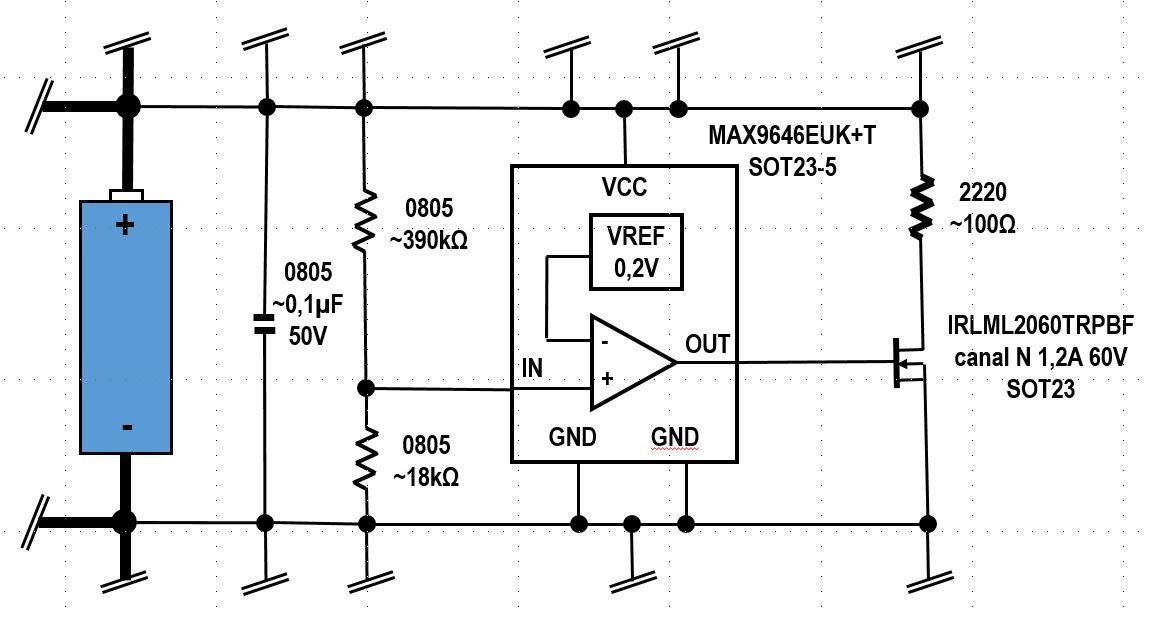
Oui. Un chargeur commence par injecter un courant constant dans la chaîne, les tensions cellules vont croître, jusqu'à s'approcher de la tension max du chargeur, ce qui fera diminuer progressivement le courant. Exemple en 16s : Chaque cellule de la chaîne est surveillée par un comparateur précis qui, lorsque la tension atteint 4,2V, dérive le courant dans un circuit en // sur la cellule. Les autres cellules ne sont pas impactées et continuent à se charger, c'est la fonction équilibrage et le mécanisme est souvent nommé by-pass. La structure est souvent comme ça : Le problème est que les by-pass de nos bms sont franchement rikiki : classiquement un mini mosfet et une résistance 100Ω, le courant d'équilibrage ne peut pas dépasser 42mA, il faut dont que les cellules n'aient "pas trop" de dispersion. Si il y a une ou plusieurs cellules à 0V, ou si le déséquilibre est excessif, l'étape "constant voltage" ne pourra pas être atteinte correctement, les by-passes seront surchargés, et la tension appliquées aux cellules valides sera excessive. @misc a raison, mais voir la remarque 3.. Remarque 1 : une cellule "morte" voit sa tension et son impédance tomber à 0, c'est quasiment un court-circuit. Cela m'est arrivé, et je n'ai jamais vu d'explication sur ce phénomène. A priori, 1 cellule morte sur 2 peut être "réveillée" en injectant un courant monstrueux... je n'ai pas essayé. Remarque 2 : il existe des pseudo bms, en fait des "équilibreurs", avec des by-pass vitaminés, qui permettent d'équilibrer rapidement des packs. Ils sont utilisés par ceux qui assemblent des cellules de récupération. Remarque 3 : nos bms ont le + souvent une sécurité supplémentaire : quand la tension d'une cellule quelconque dans la chaîne atteint 4,28V, le courant de charge est interrompu en ouvrant un mosfet en série avec le port d'entrée. Malheureusement, cette sécurité ne protège pas lors d'une charge par la sortie (mode régénération).
-
KAABO Mantis GT v2 pour un vieux nul (tutos)
Techos78 a répondu à un(e) sujet de Le Dérangeant dans Kaboo
Pas vraiment. Le contrôleur wi-fi SP105E peut être alimenté entre 5 et 24V, et il peut piloter une douzaine de types de bandes, dont la WS2812 (12Volts) donc ça devrait le faire. Mais la bande n'a pas besoin d'horloge (signal CLK) , donc 3 fils seulement comme ceci : Donc GND, DAT, VCC du contrôleur vers GND, DI, 12V de la bande. Avec du 12V à l'entrée du contrôleur. Sauf erreur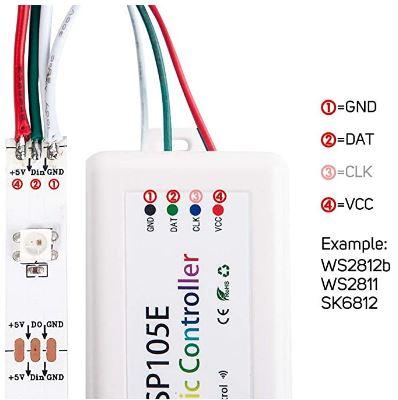
-
Idem. Heureusement, l'arrachage de pads à re-doublescotcher passe (un peu) de mode. Ouf. Vas-y @APLUfr , tiens-le bien, j'amène le goudron et les plumes
-
@Islandprawn (à propos des gadgets électriques, leds et autres). D'abord, pour la dangerosité électrique. Il faut savoir qu'une roue a une alimentation flottante. Donc pas comme le réseau 220V dont le neutre est à peu près à la terre Et pas comme une voiture dont le 0Volt est au châssis. En conséquence, si on veut prendre la bourre ou créer des étincelles, il faut toucher les 2 pôles d'alim. Exemple : cela commence à chatouiller un peu si on met son doigt (humide) sur les broches du port de charge d'une GW (ben oui, encore, désolé @Tank ), Rien de grave pour le corps, mais si c'est un objet métallique, il y aura effectivement une belle étincelle, le temps que les broches fondent. Mais pas de quoi amorcer un incendie. Pourtant là, c'est la tension batterie 67--84--100V qui intervient. Pour les gadgets, ils peuvent être connectés au 5V de la carte mère (usb par exemple, limités à 2A), ou une tension auxiliaire genre 12V phare, là aussi théoriquement limité par la carte mère. Difficile de faire beaucoup de dégât avec un courant d'environ 2 A, des composants grillent éventuellement en cas de court-circuit et c'est tout. Par contre, si on est relié directement à la batterie, il faut impérativement prévoir un fusible car les risques sont réels.
-
La casse me semble peu probable. Je me base sur mes 10 ans de rollers-in-line pendant lesquels j'ai consommé environ 150 roulements, en catégorie ABEC7 et + . Je n'ai jamais constaté de bille cassée, même si certains étaient devenu durs à cause d'un stockage humide trop long. L'usure provoque "simplement" un bruit de gamelle, un peu de jeu, une perte de rendement (glisse...). Ceci dit, en voiture (roue av), j'ai eu une fois des billes cassées (bruit de vieux moulin à café) mais sans blocage. Et sur une caravane, là, carrément le roulement (à rouleaux) pulvérisé, la fusée bien ruinée, la roue ayant des envies d'indépendance.



