
Techos78
-
Compteur de contenus
7791 -
Inscription
-
Dernière visite
-
Jours gagnés
191 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par Techos78
-
Sans vouloir jeter la pierre à GW, il faut tenir compte d'une caractéristique, un peu "désagréable" : l'étanchéité du passage de roue (sur certains modèles) est mal assuré car le raccord de coques internes n'est pas jointoyé. OK, cela facilite la dépose de roue, et la carte mère sur le côté est relativement à l'abri, mais remplir la poignée de flotte ne me séduit pas trop. Chez IM, l'absence (oubli?) de joint a posé problème (batterie "banane" au dessus du pneu), mais pas longtemps, cela a été rectifié vite fait. Il ne faut pas trop compter sur la boue pour étancher... quoi que . Sur une roue, il faut bien distinguer les deux niveaux de protection nécessaires : le passage de roue (projection) et le dessus (ruissellement). Si j'était concepteur de roues, j'enfilerais volontiers un garde-boue (genre vélo) au dessus du pneu, pour éviter d'avoir à mettre du joint... En le laissant dépasser de chaque côté, pour éviter de se repeindre les fesses.
-

KAABO Mantis GT v2 pour un vieux nul (tutos)
Techos78 a répondu à un(e) sujet de Le Dérangeant dans Kaboo
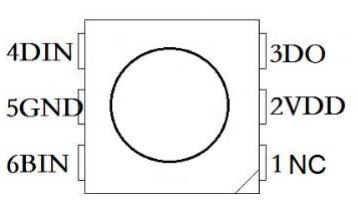
Tu as raison, il est préférable d'utiliser quelques images pour clarifier, surtout que ces leds adressables sont un peu plus compliquées que je ne l'imaginais. Donc ces leds (que je ne connais pas ) sont des puces 6 broches, montées sur des bandes sécables 4 broches : (remarquez la capa à côté de la led) Les puces comportent 6 broches : --1-- NC -- broche d'alimentation locale, à connecter uniquement à un condensateur externe --2-- VDD -- alimentation +12 Volts --3-- DO -- donnée de sortie, à chaîner avec led suivante, sauf la dernière --4-- DIN -- donnée série d'entrée, 8 bits par couleur (RGB) = 16 millions de couleurs --5-- GND -- "masse", référence 0V électrique --6-- BIN -- entrée backup, reçoit la donnée d'entrée de la puce précédente (tolérance aux pannes) Le chaînage (cascade) conseillé est celui-ci : Le chaînage DO->DI permet une remise en forme (buffer) du message série afin de le transmettre sur de grandes longueurs sans distorsion. ,Je pense que sur les bandes, le marquage "+5V" n'est pas explicite, il s'agit du signal BIN. A l'entrée de la bande, il faut connecter ce signal au 0 Volt (Gnd) car une entrée logique "en l'air" n'est jamais conseillée. C'est uniquement quand il n'y a pas de signal sur DIN que la puce commute sur BIN, ce qui est inutile pour la première led. Le schéma ci-dessus est parfaitement clair et non équivoque, et il confirme la tolérance aux pannes évoquée par @crockmi le spartiate . Yapuka...

-
KAABO Mantis GT v2 pour un vieux nul (tutos)
Techos78 a répondu à un(e) sujet de Le Dérangeant dans Kaboo
En général, il y a une broche d'alim VDD, une broche de masse Gnd, la donnée d'entrée DI (data in) qui présente le mot série nécessaire à l'adressage de chaque led, puis une broche DO (donnée out) qui n'est utile que quand on chaîne plusieurs rubans (sur le DI suivant), et qu'on laisse non connectée sur le dernier ruban. -
Infill à 0.12 , ce n'est pas très généreux , non ?
-
A savoir : la gestion "intelligente" des batteries de la z10 a un problème très pénalisant pour les montagnards : le mode régénération (dans les descentes) ne recharge qu'une seule des deux batteries. Cela peut expliquer certains écarts entre les deux packs, ainsi que certaines alarmes lorsque les batteries sont relativement pleines.
-
Inmotion V11, 1ere roue! (ELLE EST DCD) <= Elle est ressuscité !
Techos78 a répondu à un(e) sujet de GaelC dans Discussions générales
Est-ce que la roue est libre, c'est à dire est-ce que tu peux la tourner à la main (position couchée). Si c'est un peu dur, ça peut être un court-circuit (en général mosfets cramés), si c'est très dur, c'est qu'il passe du courant dans le moteur : il faut déconnecter les batteries sinon tu vas les tuer... -
A priori, tu inaugures une aventure inédite, une déprogrammation spontanée (nocturne ou lors du power-on). J'imagine que toutes les roues sont programmables uniquement lorsqu'elles sont sur ON... mais il est possible que le bt système soit quand même alimenté (certaines roues acceptent la mise en route distante...), de même que le bt audio pour la musique (mode baffle de salon). Sentimentalement, j'ai du mal à imaginer que ce soit une perturbation du bluetooth, le protocole est assez compliqué (sauts fréquentiels 79 canaux, autour de 2,4GHz), il est difficile d'obtenir une liaison maître-esclave cohérente, puis la roue elle-même n'accepte pas n'importe quelle donnée... Mais le µcontrôleur est toujours en veille, il surveille principalement le poussoir on-off, il est possible (?) qu'il soit pris d'un coup de folie... fugitif car il est probable (?) que la fonction Watch Dog soit utilisée pour créer un reset soft... C'est d'autant plus étonnant que l'écriture de données en mémoire non volatile est elle-même très sécurisée, avec des séquences d'écritures de mots magiques 5555-AAAA selon un timing précis. Le compteur Linky n'incorpore pas d'émetteur radio, il fonctionne par courants porteurs (cpl). C'est le concentrateur au niveau du quartier qui envoie les mesures en hf. Donc un Linky perturbe facilement certains "vieux" équipements domotiques, mais en aucun cas des liaisons radio.
-
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
Yes. Mais par exemple chez KS, il y a des contraintes : -- bip1, bip2, bip3, tb : pour être validées, les vitesses choisies doivent être croissantes, mais bip3 et tb peuvent avoir la même valeur. -- bip1 et bip2 peuvent être inhibés ( il suffif de programmer 0 km/h ) -- il y a une valeur maxi indépassable pour tb, qui dépend de la roue. par exemple la ks16b-800W c'est 30, Au choix, on a beeeep ou "please decelerate". Sur ma roue "routinière" ks18s-1500W, j'ai mis 0,0,36,37 ce qui me suffit largement. ( Désolé pour ce hors sujet ) -
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
Les roues autres que GW ont généralement 3 alarmes sonores de vitesse et une alarme sensitive (lilt back). GW a "remplacé" le bip 3 par une alarme à 80% de taux de charge, non réglable. et c'est très bien. -
Retours de nos expériences Kingsong KS-S18
Techos78 a répondu à un(e) sujet de nrvfromcnr dans KingSong
@TitiCongerosSalsa : Cales intégrées = moins de prise de tête -
demande un conseil technique pour brancher une poignee d accélérateur pour draisienne Électrique
Techos78 a répondu à un(e) sujet de shooter06 dans Draisiennes
J'y connais pas grand chose. Souvent, que ce soit une poignée tournante ou une gâchette, les "gaz" sont pilotés par une tension analogique, issue d'une sonde à effet hall linéaire devant laquelle se balade un aimant. Il y a donc 3 fils, qui sont l'alim 5 V et la sortie (variable, ~ 1 à 4V) Dans l'exemple ci-dessus, le throttle line comporte un fil noir et rouge, ici le fil de sortie est bleu mais pas forcément. Et il y a différents types de connecteurs. ( Bon, j'ai été grillé par @Christian-91 mais je poste quand-même ).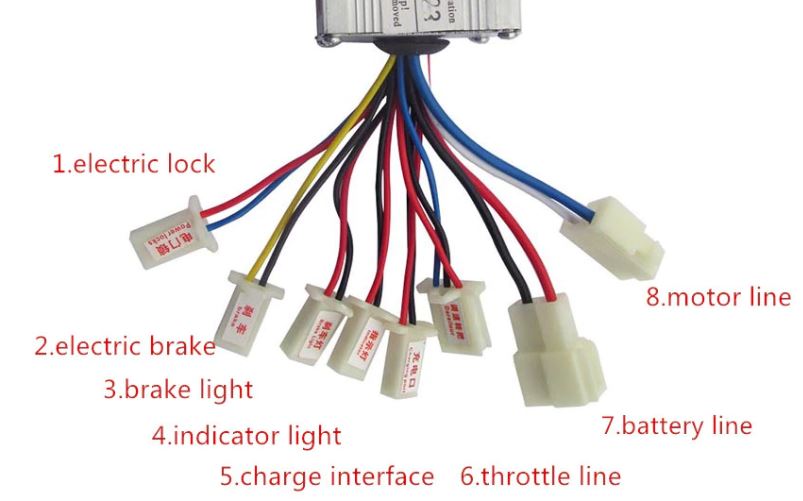
-
Il y a plus de 3 mois que @Simon P a posé cette très importante question. QQOQCCP ? ( Désolé si la réponse a déjà été donnée, le fofo est bigrement prolixe... )

-
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
Les pistes cyclables sont souvent protégées par des poteaux, faut-il mettre une coquille ? -
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
@misc : tu me fais immensément plaisir, merci pour ce lien. Je vais regarder cet "inverter load" qui ressemble terriblement au cycle de service que je souhaite tant. Avec une appli qui afficherait ça sous forme de bargraphe 0...100%, on pourra (?) oublier les puissances calculées devenues inutiles... Un pas vers l'épectase ?... -
Tiens, une féminine, c'est plutôt rare, soit triplement la bienvenue. J'ai fait mon apprentissage (laborieux car vieux-chnock) sur ks16, et je me suis bien imprimé les packs (=parpaings) dans les mollets. Pour faire bref, je n'ai pas trouvé cette roue confortable. Par la suite, ça s'est amélioré, mais cette notion de confort a été un critère décisif pour les roues suivantes. Et pour des jambes de gazelle, cela n'a pas été un peu "rugueux" ?
-
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
En effet, 2P est peut-être un peu peu. . mais en toute rigueur, ce devrait être suffisant, ce n'est pas plus critiquable que du 18650-4p énergisant un moulin de 2 kW. Ce qui est curieux dans cette roue, c'est la tension 74V, un peu copieuse, mais le facteur de forme bananoïdal du pack doit y être pour quelque chose, et le moteur doit être bobiné en conséquence... Je vais encore évoquer le sujet qui me désespère depuis l'origine : le taux de charge du moteur n'est pas transmis en bluetooth (*). On est absolument incapable de dire si la puissance module à 75% ou 99,9%, je suis scandalisé. Bon, j'écourte, sinon je vais utiliser tous mes Kleenex. (*) pour des raisons historiques, et les chinois se copiant les uns les autres, c'est pareil pour toutes les roues... mais Gotway a eu l'idée géniale de mettre l'alarme sonore 3 à 80% de charge moteur, ce qui est considérablement plus intelligent qu'une alarme de vitesse. -
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
@BelforToF : tu as complètement raison de lancer des alarmes, ton expérience mettant en cause une gestion suspecte du bluetooth conduisant à une perte d'asservissement. Éventuelle diablerie à surveiller. Là où se suis plus réservé, c'est quand tu présentes la V8 comme un truc hyper sécure. Ben non, un moteur 800W est effectivement exploitable, mais encore une fois, il ne faut pas trop le bousculer. La V8 a du couple, le off-road et le tricking passe plutôt bien, mais le comportement en routier "rapide" est très/trop juste. Moi aussi (~90kg), je me base sur mon expérience. J'ai aussi malmené ma ks16b-800W allègrement, et un jour, suite à une accélération virile sur route, elle a piqué du nez... et j'ai rattrapé en baissant les fesses et en jetant les jambes en avant (réflexe de 10 ans de rollers). Quand le moteur sature et décroche, il n'y a généralement pas d'alarme sonore et jamais de tilt back (qui nécessite de la ressource). Il ne faut pas se leurrer, si une majorité de wheelers investissent dans des moteurs puissants, en passant à des tensions supérieures, ce n'est pas par hasard. De plus, pour le pilote, il beaucoup plus reposant d'avoir de bonnes marges fonctionnelles plutôt que de rester borderline avec des mises en vitesses asymptotiques. De plus, cela repousse d'autant les restrictions de batterie faible, toujours pénibles. -
Ça y est, je m'y suis mis (au tas !) - première coupure inmotion V8
Techos78 a répondu à un(e) sujet de Llaber dans Discussions générales
@Llaber , désolé pour ta gamelle. Il n'y a pas trop de bobo, et tu le prends plutôt avec philo, c'est bien. Cela a été dit, 800Watts c'est pas bézef pour wheeler à 25-30. Quant aux accélérations, la mollitude s'impose. Quelques chiffres. En gros, pour rouler à 25km/h une roue consomme ~18Wh/km soit une puissance de 450Watts. Et pour accélérer il faut injecter une puissance supplémentaire ( énergie cinétique 1/2*m*v^2 ) Par exemple, pour accélérer 100kg de +18km/h (5m/s) il faut injecter 100*5*5/2 = 1250 Joules, si cette accélération est répartie sur 3 secondes, il faut que le moteur fournisse 1250/3 = 416 Watts. Donc pendant l'accélération 450+416 : on dépasse facilement la puissance nominale, heureusement la roue a une certaine marge pour fournir une puissance instantanée supérieure, mais il ne faut pas en abuser... -
Pour faciliter les dialogues, il faudra essayer d'être plus précis. C'est la jante ou le pneu qui est décentré ? Le pneu tourne rond mais est décalé dans le passage de roue ? Ou le plan de rotation oscille verticalement, ou il oscille latéralement ? Si possible mettre des chiffres... Compléter avec un test de sur-vitesse en soulevant la roue, ça ne devrait (?) pas trop vibrer. Le calage angulaire en tangage des pédales est classique. Sur les vieilles roues, il faut mécaniquement caler l'engin à l'angle désiré (avec le roulis nul) puis faire OK. Là, le système est plus moderne, tu demandes un angle via l'appli et cette nouvelle valeur est transmise. Bon, cela me semble très pratique (je ne connais pas), j'imagine qu'il ne faut pas être trop exigeant avec cette nouvelle méthode qui nécessite théoriquement une calibration du biais accéléro en usine, ce qui n'était pas nécessaire avec la première méthode. Si tu as des loisirs et un bon inclinomètre, tu peux tracer la courbe tous les 2°, tu verras si c'est le 0 qui est décalé ou les facteurs d'échelles + et - qui sont différents. Roue toujours verticale en roulis. Honnêtement je pense que le sav va t'envoyer dans le mur avec un truc pareil... mais peut-être pas si ils sont capable de débiaiser l'accéléro à l'aide d'une appli particulière qui permet l'accès aux paramètres enterrés. Ceci dit, l'important est de pouvoir incliner la bouzine, que cela fasse 7 ou 12° n'a aucune importance. Que le tilt back soit à 25° ou 35°, tout le monde s'en fout. Si tu veux connaitre les performances des accéléromètres, ce sont probablement ceux là : MPU-6000 , pour avoir l'angle il faut un peu de trigo...
-
Mmmm, c'est un peu tôt pour enterrer les axes creux. Les axes qui plient ou cassent sont une plaie rédhibitoire, les roulements médiocres sont pénibles mais gérables pour un bricoleur attentif... Comme diraient les grecs, on passe de Charybde en Scylla, sauf que Scylla est un peu plus sympathique. Il est possible que New Walkings fasse "des efforts" pour faire oublier son comportement dégueulasse vis à vis des boutiques parisiennes... mais on peut aussi se rappeler la série de roue dont l'axe mal serti/goupillé faisait cloc-cloc... @Furqo_JQ : si possible, dis-nous quelle roue tu as, celle avec les petits roulements, ou les nouveaux qui sont plus gros.
-
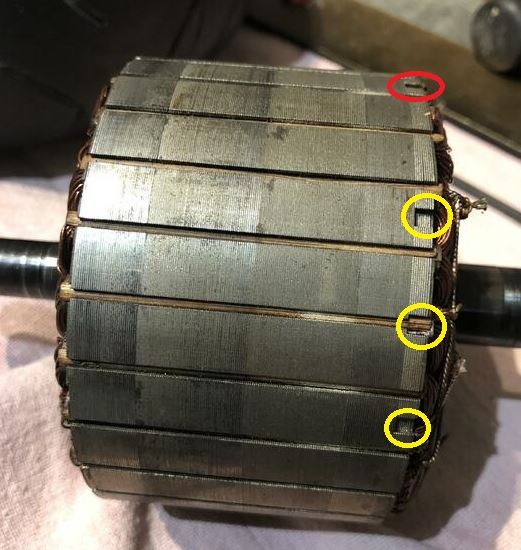
Ooops, tu as raison, au temps pour moi. (expression militaire, ne pas écrire autant pour moi). J'avais mal regardé les encoches (jaune), presque bien placées pour mettre des sondes.
-
prawn = crevette, in English in the text C'est chaud par ici, je ne peux que conseiller une visite au Nord de Oudezijds Achterburgwal (Amsterdam)...
-
Je suis très surpris de voir ces deux rangées décalées l'une de l'autre. Sentimentalement, je pense que c'est plutôt néfaste, le champ tournant (stator) aurait plus d'efficacité en s'appuyant sur des pôles (aimants du rotor) plus homogènes, surtout que les sondes de Hall sont placées que d'un côté... bizarre, je ne comprends pas bien le résultat, il faudrait simuler tout ça... J'imagine (?) c'est dû à des difficultés de réalisation. Il est "facile" de coller une rangée d'aimants car étant alternativement N et S et placés côte à côte ils s'attirent. Mais pour commencer à placer la deuxième rangée, ça se gâte nettement : placer deux aimants de même pôle côte à côte est extrêmement difficile (par exemple, recoller un aimant cassé est quasi impossible). Je pense que le collage doit être une galère extrême, même en acceptant un certain décalage...
-
J'étais en mode idle, je reprends de l'activité en remontant un échange récent : C'est vrai que c'est troublant : les flasques GW sont très enveloppants alors que les IM ne protègent pas les joints de roulements. C'est dommage, je ne comprends pas cette économie de matière... Concernant la solidité des roulements, là il faut se contenter de faire confiance aux manufacturiers... Il y a de très belles vidéos (merci Youtube) qui montre la fabrication des billes... Ceci dit, chaque roulement a des spécifications d'utilisation qu'il convient de respecter. Pour les grosses charges, avec effort axial (voitures), on passe souvent aux roulements à rouleaux coniques... @King Size a eu raison d'insister sur le fait qu'il y a 2 roulements qui permettent d'augmenter considérablement la résistance aux efforts de torsion, mais il faut gérer convenablement la liberté ou la pré-contrainte axial inter-roulements. Pour les rotations performantes (gyros mécaniques, têtes de magnétoscope...), il faut aussi apairer les roulements en fonction de leur spectre vibratoire.
-
Avec l'âge, un moteur perd de son efficacité. Cela vient des aimant néodyme qui perdent leur aimantation, souvent d'environ 0,5% par an, mais c'est variable selon l'environnement thermique et les champs qui leurs sont opposés. De base, un aimant néodyme accepte qu'on lui applique un autre aimant de même polarité touche-touche (ils se repoussent), mais si un électroaimant dépasse le champ coercitif, on peut désaimanter l'aimant en moins d'une milliseconde, et éventuellement l'aimanter dans l'autre sens si on applique une valeur triple du champ coercitif... C'est d'ailleurs comme ça que l'on crée les aimants.. Bien sûr, les bobinages sont excités de façon à rester en deçà des limites. Il n'est pas possible de ré-aimanter les aimants une fois qu'ils ont été collés à l'intérieur de la jante.



