




Stanor
Membre
-
Inscription
Tout ce qui a été posté par Stanor
-
la TVA est comprise dans le prix. mais cette sommes, les chinois la mettent de côté, et tente de faire passer la marchandise sans s’affranchire des taxes douanières. soit ça passe, et ils gardent les 20%, soit ça passe pas et ils payent les 20% plus amende douanière, et retard sur la livraison. c’est invisible financièrement pour le client mais la date de livraison est prolongée. ils se font rarement intercepter, le jeu en vaut la chandelle pour eux. mais ils doivent s’adapter en fonction des contrôles douaniers. ils ont 2 modes de locomotion : ferroviaire ou maritime. côté maritime, c’est plus long en durée de livraison.
-
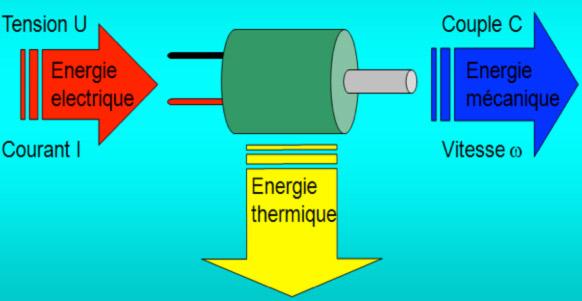
ha oui, et aussi, il n'y a pas que le moteur où il y a une perte d'énergie par chaleur. Le contrôleur aussi perd de l'énergie au niveau des Mosfet, c'est pour cela qu'il y a un radiateur et un ventilo dans la tesla tu as donc de la déperdition au niveau du contrôleur, des câbles et du moteur. tout ceci réduit le résultat de la conversion de l'énergie électrique en énergie mécanique.
-
donc, que le contrôleur de ta TESLA crache 6000W, ça ne m'étonne pas. Touches le moteur après une bonne longue grimpette, tu va être surpris de la chaleur Sur mes côtes pourries, j'ai déjà monitoré ma Mten3 à 4500W. et ce n'est qu'une 10 pouces pour un moteur de 800W nominal. ( et j'ai une lamelle d'acier plaqué nickel sur ma batterie qui commençait à fondre au bout de 2 mois d'utilisation... )
-
Je pense que tu as eu une erreur dans la citation sur ton message, je ne suis pas l'auteur de la citation concernant la partie dont j'ai parlé, ce n'ai qu'en prenant la partie physique et mathématique sans prendre en considération l'ensemble des paramètres. C'est clair qu'il y a bien d'autres causes à prendre en compte. pour la partie théorique, suite à un questionnement de Koto, j'ai reformulé proprement ce que j'ai dit précédemment au sujet du couple / taille de pneu / force motrice :
-
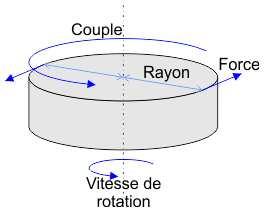
@koto , j'ai des bout d'info sur plusieurs sujets qui peuvent t'intéresser. Je vais essayer de te résumer cela : 1) Le Marketing : La première erreur que l'on fait tous, c'est de prendre en considération les données techniques des moteurs comme les valeurs réellement exploitées par les constructeurs de monoroue. Ce qui est totalement faux. Ces données technique sont juste une info pour donner les conditions d'utilisations optimales d'un moteur à une puissance délivrée constante, et éviter ainsi sa détérioration précoce. quand on parle de puissance nominale ou crête, c'est de l'électricité dont on parle et non de la puissance mécanique. à des puissances constantes plus élevées, les matériaux utilisés chauffe trop, et quand la matière chauffe, elle se dilate ( c'est un paramètre très important dans la mécanique de précision ). Hors, comme tu as pu le remarquer, la puissance délivré par le contrôleur peut être bien supérieur aux données techniques. Ses piques de puissances sont relativement ponctuelles où fournis sur de court terme. C'est le choix du fabriquant afin de permettre a ton moteur d'augmenter son couple. On peut très bien balancer 6000W dans un moteur de 250W pendant une seconde. le moteur va quand même prendre tarif, mais imagine si tu le fait pendant 1 heures, il y a du métal qui va fondre 2) conversion puissance électrique / puissance mécanique : je ne t'apprend rien en te disant que Puissance électrique = Tension x Intensité. Faut savoir qu'un moteur n'est jamais parfait. Il a un coefficient de rendement. C'est une donnée technique que se garde bien de donner les fabricants de monoroue car c'est pas très marketing. pour t'expliquer cela, je fais le choix arbitraire d'un rendement de 80%. Lors de la conversion de l'énergie électrique en énergie mécanique, 20% d'énergie vont êtres perdu ( plusieurs types de perte : perte par friction de l'arbre du rotor, l'effet joule (chaleur ),... ) autrement dit, si ton controleur envoi 1000W électrique, ton moteur fournira que 800W mécanique. Jusque là, rien de compliqué. Maintenant, on va corser la chose -> la génération du couple. 3) Couple du moteur : une fois que tu connais la puissance max que peut débiter ton contrôleur et si tu arrives à connaitre le rendement du moteur, tu as ta puissance mécanique max (théorique car effectivement, la température joue son rôle ) pouvant être délivré par ton moteur. Le couple va dépendre du nombre de rotation que va faire ta roue à un instant T. moins ta roue tourne plus elle aura de couple, plus ta roue tourne plus elle aura de couple ( dans le sens où la puissance généré de base est constante ). si je prend un moteur à l'arrêt et que je l'alimente avec 10W en constante, au démarrage elle va développer le max de son couple vis à vis des 10w, et dès qu'elle a atteint sa vitesse max par rapport aux 10w, elle n'aura plus de couple. La formule : Couple (Newton.mètre) = Puissance / w (radian.s^-1 ) w =( vitesse de rotation tr/s) x 2 x Pi(3,14) admettons, ta roue effectue un tour par seconde et elle fourni une puissance de 800w mécanique, tu génères donc un couple de : C = 800w / ( 2x 3,14) = 127 N.m [ a titre indicatif, j'exerce un couple de 115 N.m quand je ressers les écrous des pneus de ma voiture avec un outil dédié. ] Maintenant que tu connais ton couple, ce n'est pas encore la valeur sûr pour comparer ta monoroue de 16 pouces, avec une monoroue de 18 ou de 10 pouce. 4) Force Motrice : La force motrice, c'est celle que tu ressens essentiellement lorsque tu accélères, tu grimpe une côte ou tu maintiens ta vitesse. Cette force est appliqué à l'extrémité du pneu. Ce qu'il faut donc calculer, c'est la Force Motrice ! et cette force motrice va différer en fonction de la taille de ta roue. Force( Newton ) = Couple (Newton.mètre) / Rayon( mètre). Pour un couple identique, plus le rayon est grand moins il y aura de force motrice : 10 pouces = 0,254m -> Rayon = 0,127m -> Force motrice = 127 / 0,127 = 1000 N 16 pouces = 0,406m -> Rayon = 0,203m -> Force motrice = 127 / 0,203 = 625 N 18 pouces = 0,457m -> Rayon = 0,228m -> Force motrice = 127 / 0,228 = 557 N pour récapituler, à l'instant "T" où ta roue est entrain d'effectuer 1 tour par seconde, et que ton contrôleur lui injecte 1000 Watt : ton moteur génère 800W, équivalent à un couple de 127 N.m, ce qui engendre une force motrice de 625 Newton sur ta roue de 16 pouces. C'est pourquoi dans les grimpées de côtes ou accélération, une grosse roue doit débiter plus d'énergie qu'une petite roue pour avoir une force motrice identique. Là, c'était pour la partie Théorique. Dans la pratique, il y a d'autres paramètres à prendre en compte. 5) De la théorie à la pratique : Par exemple, le poids du wheeler et de la roue est important. car dans une côte, le poids va générer une Force inverse à celle de la Motricité, et donc la roue va devoir débiter une énergie supplémentaire pour générer une force motrice plus conséquente pour faire avancer le wheeler. après, ya la résistance de l'air sur le wheeler, la température, les différentes techno, les rendements.... tout un tas de truc ! Moralité : NE JAMAIS SE FIER AUX DONNEES MARKETING !!!!
-
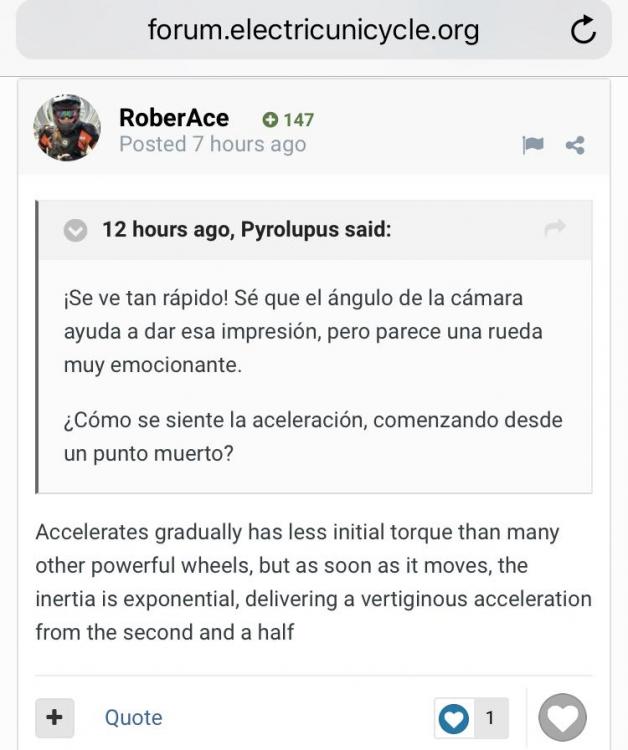
comme le dit @Ibaloo, y’a l’histoire de la température a gérer, mais il n’y a pas que ce paramètre qui rentre en ligne de compte : en faite, comme je l’avais expliqué avant, on pense au couple, mais c’est la force motrice dont ils se plaignent. les nouvelles roues n’ont pas forcément moins de couple que les roues de 16 pouces. elles peuvent même en avoir plus, et pourtant, leur niveau de motricité parait plus faiblard, résultant des 2 pouces supplémentaires. pour avoir une force motrice équivalente voir supérieur, il faut que le controleur du 18 pouces débite plus de watts que le controleur de 16 pouces. et l’injection de watt implique l’augmentation de chaleur, donc faut trouver un moyen de fournir cette énergie supplémentaire et évacuer la chaleur. et faut pas oublier que ce bestio pèse déjà 25 kg, sans compter votre poids. pour une personne de 60kg, sa fait tout de même 85kg au total. moi ( 80kg cul nu ) avec ma Mten3 (10kg), ça fait 90kg. je suis prêt à parier que ma 10 pouces à moins de couple que la Z10 mais développe plus de force motrice. c’est vérifiable en faisant un duel à la fast & furious ! je serai devant au démarrage, mais passé 25 mètres, la z10 va repasser devant et m’enrhumer ( faut pas oublier que la 10 pouces devra faire plus de rotations pour maintenir la vitesse donc perte de couple donc moins de faculter à accélérer avec la prise de vitesse. par ailleurs, l’inertie de la Z10 a l’air de faire des merveilles )
-
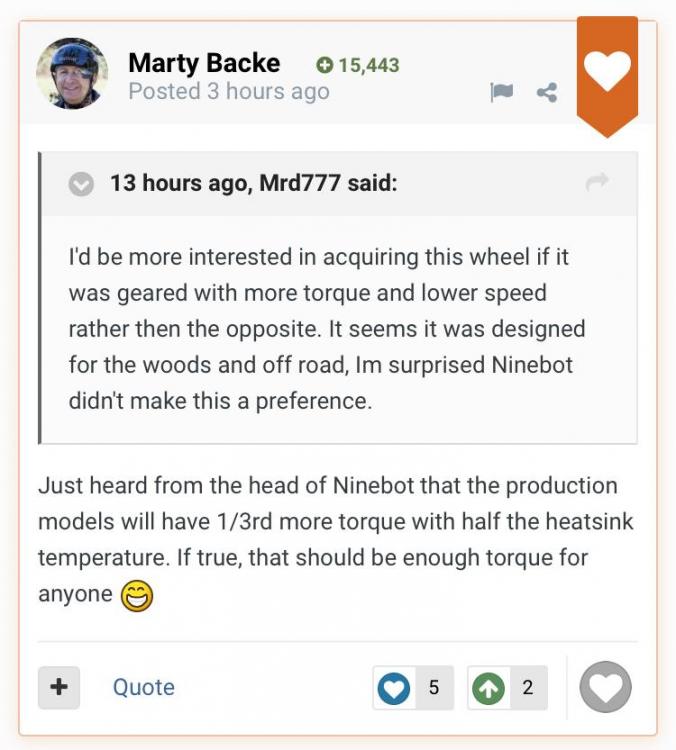
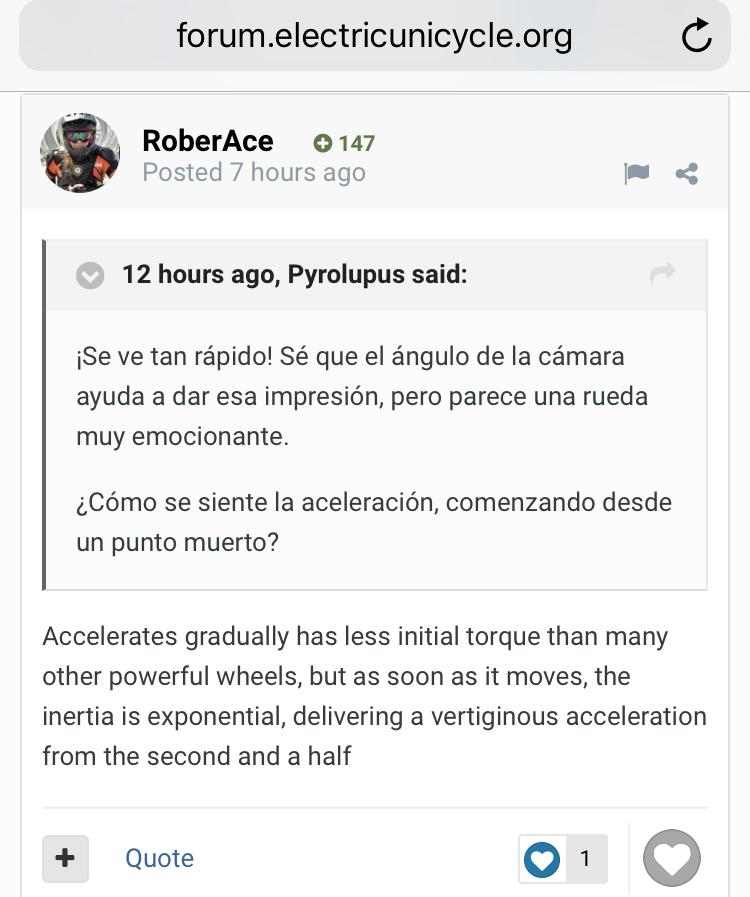
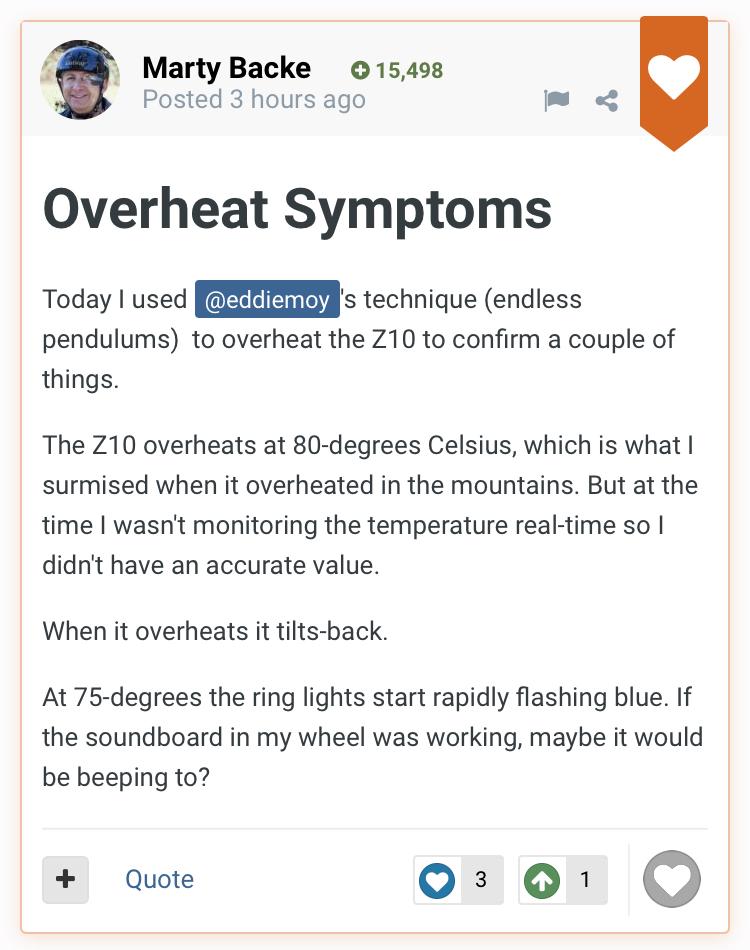
Selon RoberAcer c’est l’inertie de la roue qui fait tout le boulot. il signale que sa Z10 manque de couple sur les démarrages, mais l’accélération augmente au fur et à mesure qu’il prend de la vitesse. c’est ce que signalait Marty, manque de couple à bas régime. attention les montagnards à fort gabarit. trouvez un moyen de la tester avant de vous engager, sinon je pense que vous trouverez reprenneur sur ce forum
-
-
-
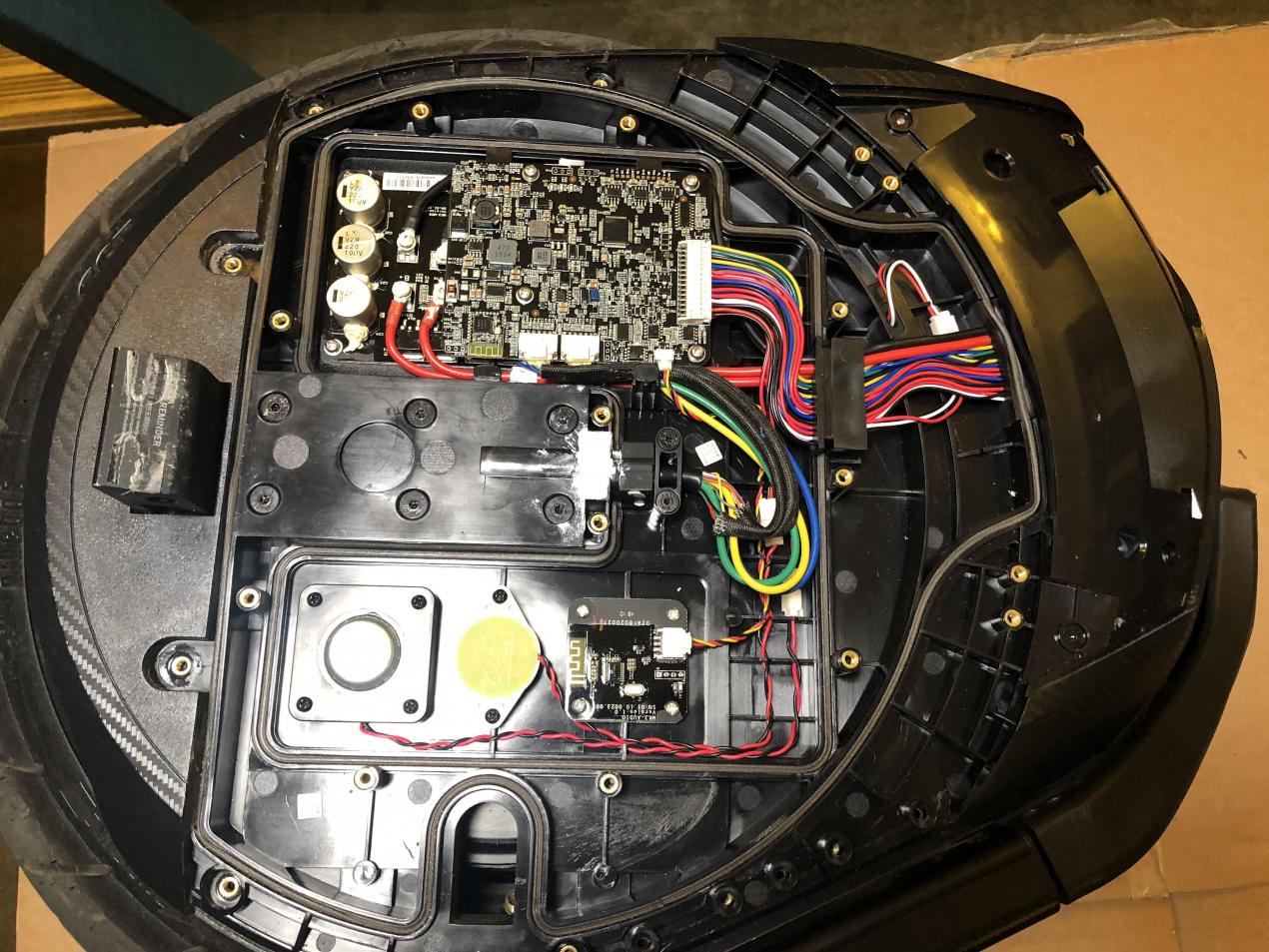
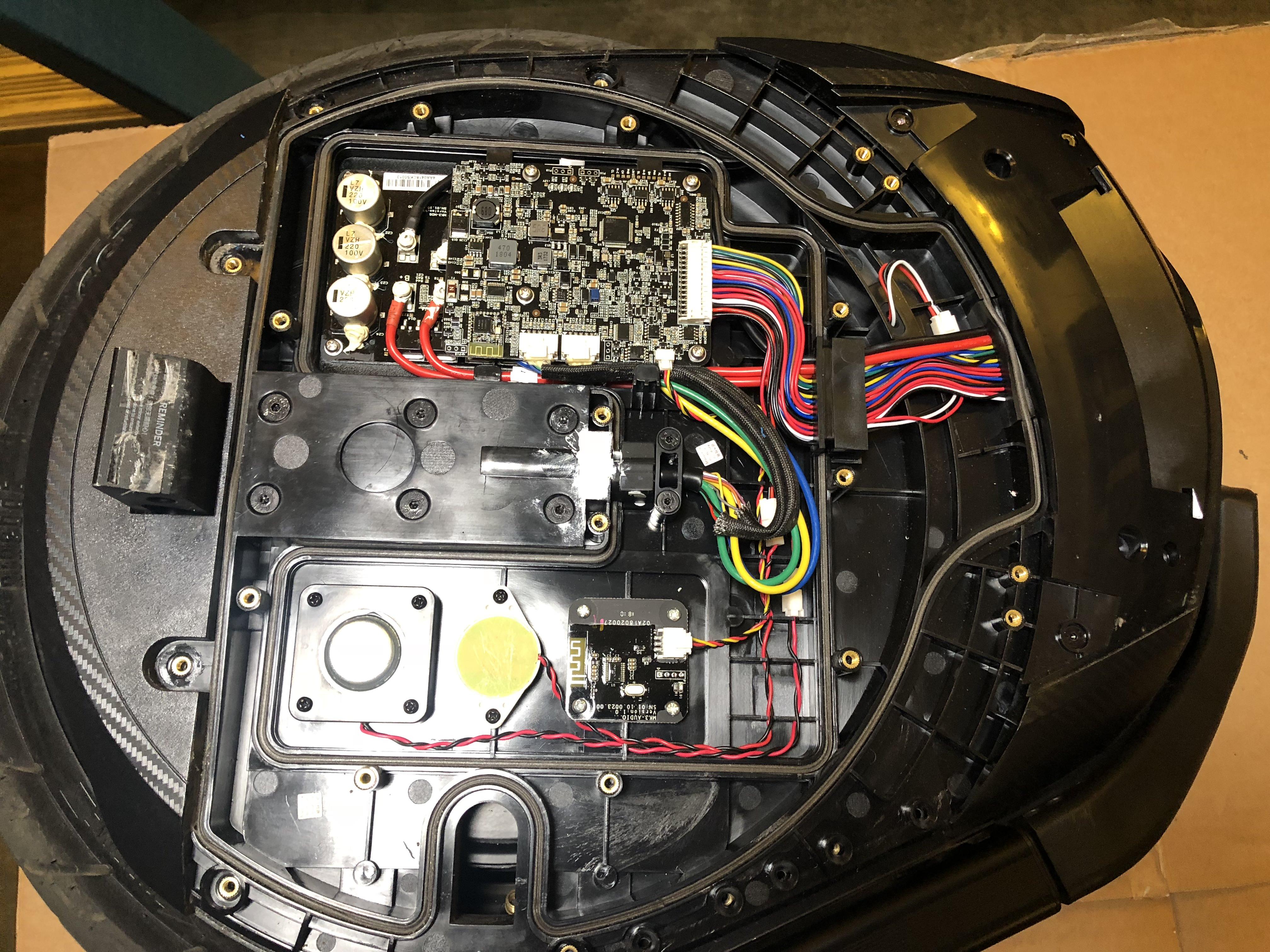
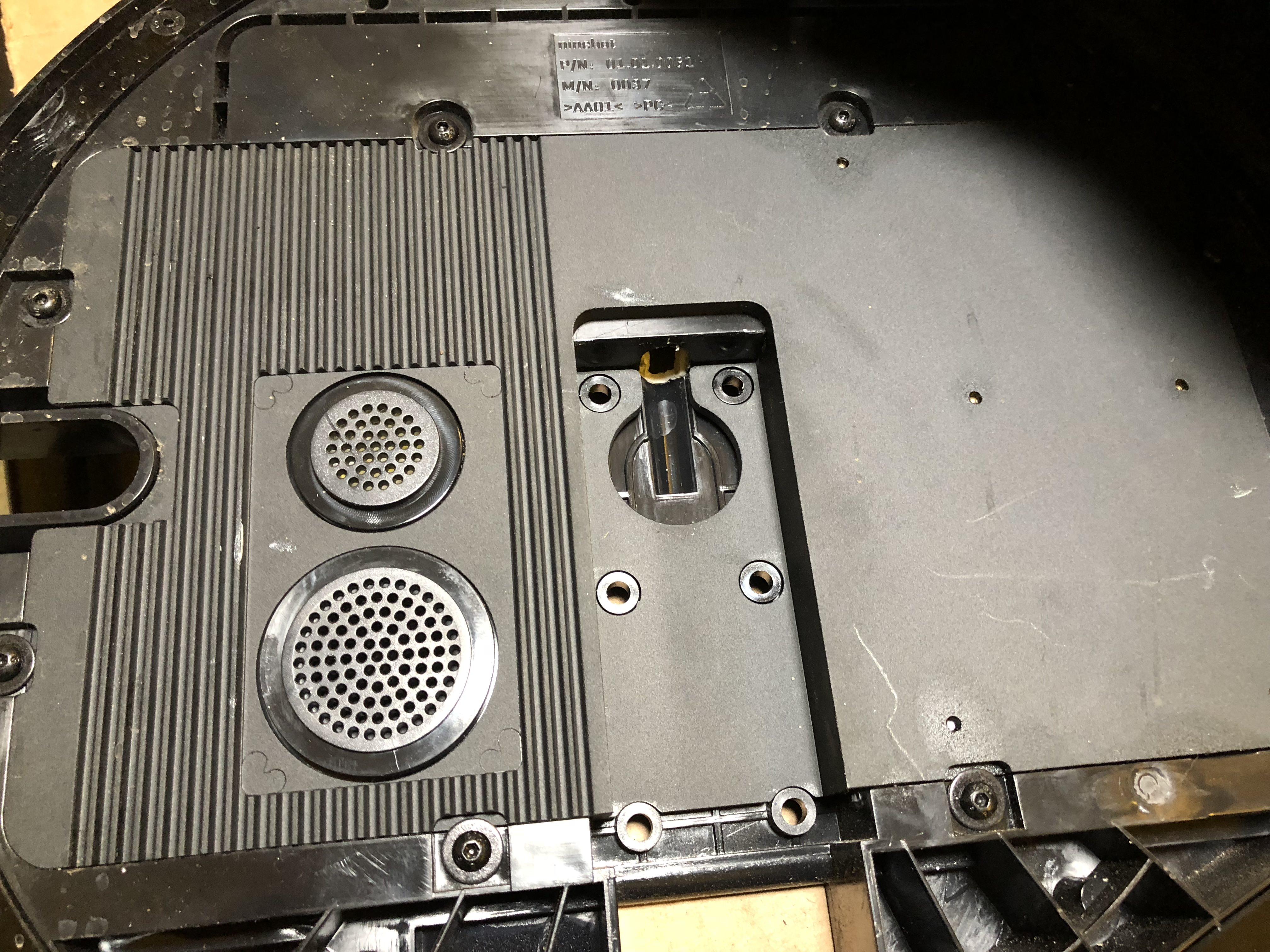
Ce qui est marrant, c'est que le côté nervuré n'est pas du côté de la carte mère, mais des haut-parleurs. C'est surement du au flux d'air qui doit tourbillonner plus vers l'arrière qu'à l'entrée. du coup, la techno de ninebot m'impressionne moins maintenant qu'elle est explicable dommage que Marty n'ai pas pu faire de monitoring, je suis curieux de savoir l'intensité max qu'a débité son contrôleur dans la côte où elle a échoué.
-
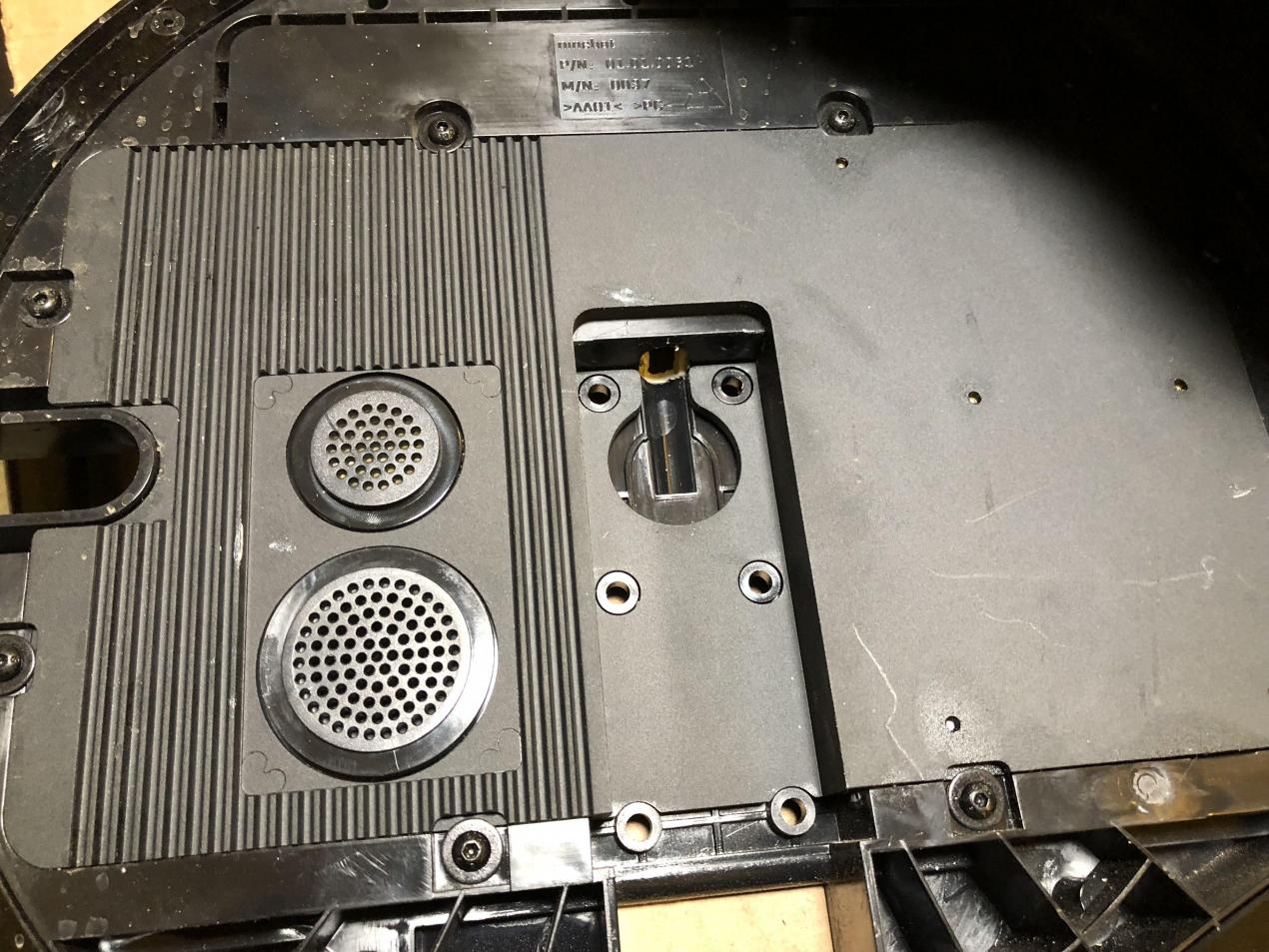
qu’est-ce que tu appelles semelle dissipative ? ( radiateur ? ) je viens de mettre la main sur une photo de l’arrière de la coque où est fixé la carte mère, vue côté pneu. Je me trompe peut être mais ce que j’ai cru etre du plastique au premier abord, est surment une plaque métalique noire mate ( traité surment en surcouche contre la rouille ) maintenue par des visses avec rondelles. Ce qui pourrait expliquer sa faculter à dissiper la chaleur, grace au flux d’air entre le pneu et la coque. Si c’est cela, là maintenant, je suis moins étonné.


-
-
celles d’avant maintenant étaient des béta. elles ont toutes fait l’objet d’un rappel pour mise à niveau. j’avais lu cela sur le forum américain. seul la lampe ( n’éclaire pas la route et aveugle celui d’en face ) et le trollet ( rouille et fragile ) n’a pas fait l’objet d’une mise à jour. ils ont pas eu le temps car ils voulaient commencer la commercialisation début de l’été.
-
-
@Becks honnêtement j’habiterais pas un trou pommé perché sur le flanc d’ une colline, où tout est en diagonale ( ça et mes 80-85kg ), j’aurais craqué mais vu les prix pratiqués, j’aurais attendu le 11 novembre ( fête des célibataires ) pour l’avoir au meilleur tarif sur Aliexpress. pour l’heure je suis fasciné par ce quelle arrive à faire suite aux démonstrations de Marty Backe, et je suis très curieux de savoir comment les ingénieurs de ninebot ont réussi cette prouesse, car il en faut du couple sur une 18 pouces pour générer une force motrice suffisante pour pousser ce beau bébé de 87kg dans les collines ( sans compter les 25kg de la wheel ! ). Même si la roue a échoué sur sa côte la plus difficile, ça reste impressionnant pour de l’électronique sans système de refroidissement. ils doivent surment utiliser des composants électronique de type « military » pour encaisser l’intensité sans broncher au niveau du controlleur. Mais surtout, comment ils ont conçus ce moteur maison ?
-
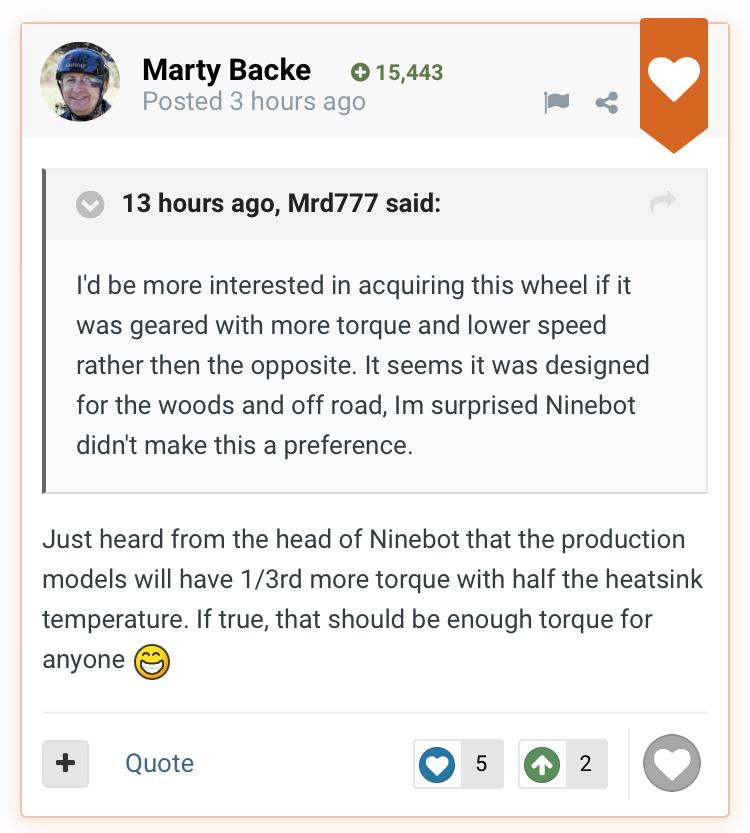
J'ai jamais commandé, mais je peux te dire ceci : Ce site est issue d'un regroupement de vendeurs chinois qui n'arrivaient pas à vendre des produits avec une clause d'exclusivité dans les commerces de type Aliexpress. Ils écoulent leurs marchandisent en conséquence par ce site pour ne pas se faire identifier. Il y a par ailleurs un intermédiaire FR. Eddine Wheeler, trouvable sur facebook. Tu peux négocier une réduction.un petit up pour relayer une info de Yi Chen : GT18's factory is my brother's, and I'm developing new products. He has an opinion. This concept is also put forward by him. We already have good design plan. His GT18 is already producing samples. L'usine de GT18 est celle de mon frère et je développe de nouveaux produits. Il a une opinion. Ce concept est également mis en avant par lui. Nous avons déjà un bon plan de conception. Sa GT18 produit déjà des échantillons.si ce qu’a été rapporté à Marty Backe est vrai, ça va faire l’effet d’une bombe dans le milieu de la monoroue. La version commerciale arriverait à générer 1/3 de couple de plus que le modèle qu’il est entrain de tester, pour une gestion de température deux fois moins élevée. si c’est prouvé et vérifié, Ninebot relai la concurrence au rang de marchand de jouet. @Becks tu sais ce que tu devras faire une fois ton bolide entre les pattes
 tu peux appliquer un couple identique à toutes les roues, c'est la force motrice qui va différer en fonction du diamètre de la roue. Mais là où je me suis planté au début de mon aventure dans la monoroue, je pensais que les données techniques des moteurs ( Puissance nominale et crête ) étaient respecté par les fabricants de monoroue. Hors, ce n'est pas le cas. Les contrôleurs débitent des puissances bien supérieures. exemple ma Mten3 à un moteur de 800W nominale, en faisant du monitoring j'ai vu le contrôleur lui balancer 4500W pour me faire passer une côte. à la fin de mon trajet, le contrôleur est monté en température modérément car contrôlé par le refroidissement actif, mais le moteur en revanche était ultra brulant. Comment est généré le couple du moteur ? tu lui balances par le biais du contrôleur une puissance P(électrique) = 1000w. admettons que le moteur à un rendement de 80%, c'est à dire qu'il va perdre 20% d'énergie dans la conversion en énergie mécanique. Ton moteur fournit en conséquence P(mécanique) = 800w. le couple va correspondre à la division de ton P(mécanique) par la vitesse de rotation ( avec une histoire de 2Pi radian/s, mais je vais pas détailler, ça va t'embrouiller ). Plus il y aura de rotation, plus le couple va chuter. Là tu as ton couple, et le calcul devient intéressant pour connaitre là force motrice de ta roue en fonction du nombre de rotation qu'elle effectue. Force(motrice) = Couple / distance Rayon de ta roue. Autrement dit, pour un couple identique, tu vas diminuer ta force de motricité quand tu augmentes le diamètre de ta roue. pour récupérer une force de motrice identique, il faut en conséquence augmenter la puissance électrique pour avoir un couple supérieur et avoir ainsi une force motrice égale. En gros, si un contrôleur débite 4000W dans deux moteurs de diamètre différent ils auront le même couple, mais la plus petite aura une force motrice supérieur pour te tracter que celle qui aura un diamètre plus gros. tout cela pour dire ( si vous arrivez à me lire jusque là ) qu'il n'y a que 3 paramètres à connaitre pour savoir si une roue est une bonne grimpeuse : - Le rendement du moteur ( surement l'un des points fort de cette Z10 ) - la Puissance électrique max que peut débiter le contrôleur - le diamètre de la roue après, il y a les paramètres d'altérations de la force de motricité que va devoir combattre la roue : - le poids du wheeler. - la résistance de l'air sur le wheeler (vent de face par exemple ) - l'algorithme utilisé par le fabriquant qui va plus ou moins brider le comportement du moteur sur les accélérations et les grimpés de côtes, afin de protéger le circuit électrique contre d'éventuels piques d'énergies pouvant occasionner de la surchauffe. Le prototype de la KS18L a été mise en avant en vidéo pour montrer sa faculté de grimper des pentes. Il est plausible que sur la version commerciale, ils aient décidé de brider les phases d'accélération pour protège contre la surchauffe. maintenant, difficile de te dire quelle roue est la meilleur grimpeuse, le seul moyen de le savoir, c'est de faire du monitoring sur chacune d'elle ou de les tester comme le fait Marty Backe. sur le plan technique, c'est la plus petite roue avec la plus grosses injection de watt qui aura la meilleure force motrice. mais ça ne sera pas la roue la plus rapide.
tu peux appliquer un couple identique à toutes les roues, c'est la force motrice qui va différer en fonction du diamètre de la roue. Mais là où je me suis planté au début de mon aventure dans la monoroue, je pensais que les données techniques des moteurs ( Puissance nominale et crête ) étaient respecté par les fabricants de monoroue. Hors, ce n'est pas le cas. Les contrôleurs débitent des puissances bien supérieures. exemple ma Mten3 à un moteur de 800W nominale, en faisant du monitoring j'ai vu le contrôleur lui balancer 4500W pour me faire passer une côte. à la fin de mon trajet, le contrôleur est monté en température modérément car contrôlé par le refroidissement actif, mais le moteur en revanche était ultra brulant. Comment est généré le couple du moteur ? tu lui balances par le biais du contrôleur une puissance P(électrique) = 1000w. admettons que le moteur à un rendement de 80%, c'est à dire qu'il va perdre 20% d'énergie dans la conversion en énergie mécanique. Ton moteur fournit en conséquence P(mécanique) = 800w. le couple va correspondre à la division de ton P(mécanique) par la vitesse de rotation ( avec une histoire de 2Pi radian/s, mais je vais pas détailler, ça va t'embrouiller ). Plus il y aura de rotation, plus le couple va chuter. Là tu as ton couple, et le calcul devient intéressant pour connaitre là force motrice de ta roue en fonction du nombre de rotation qu'elle effectue. Force(motrice) = Couple / distance Rayon de ta roue. Autrement dit, pour un couple identique, tu vas diminuer ta force de motricité quand tu augmentes le diamètre de ta roue. pour récupérer une force de motrice identique, il faut en conséquence augmenter la puissance électrique pour avoir un couple supérieur et avoir ainsi une force motrice égale. En gros, si un contrôleur débite 4000W dans deux moteurs de diamètre différent ils auront le même couple, mais la plus petite aura une force motrice supérieur pour te tracter que celle qui aura un diamètre plus gros. tout cela pour dire ( si vous arrivez à me lire jusque là ) qu'il n'y a que 3 paramètres à connaitre pour savoir si une roue est une bonne grimpeuse : - Le rendement du moteur ( surement l'un des points fort de cette Z10 ) - la Puissance électrique max que peut débiter le contrôleur - le diamètre de la roue après, il y a les paramètres d'altérations de la force de motricité que va devoir combattre la roue : - le poids du wheeler. - la résistance de l'air sur le wheeler (vent de face par exemple ) - l'algorithme utilisé par le fabriquant qui va plus ou moins brider le comportement du moteur sur les accélérations et les grimpés de côtes, afin de protéger le circuit électrique contre d'éventuels piques d'énergies pouvant occasionner de la surchauffe. Le prototype de la KS18L a été mise en avant en vidéo pour montrer sa faculté de grimper des pentes. Il est plausible que sur la version commerciale, ils aient décidé de brider les phases d'accélération pour protège contre la surchauffe. maintenant, difficile de te dire quelle roue est la meilleur grimpeuse, le seul moyen de le savoir, c'est de faire du monitoring sur chacune d'elle ou de les tester comme le fait Marty Backe. sur le plan technique, c'est la plus petite roue avec la plus grosses injection de watt qui aura la meilleure force motrice. mais ça ne sera pas la roue la plus rapide.






Information importante
Nous avons placé des cookies sur votre appareil pour aider à améliorer ce site. Vous pouvez choisir d’ajuster vos paramètres de cookie, sinon nous supposerons que vous êtes d’accord pour continuer.