koto
-
Compteur de contenus
2796 -
Inscription
-
Dernière visite
-
Jours gagnés
46 -
Evaluation
0%
Type de contenu
Profils
Forums
Calendrier
Téléchargements
Blogs
Galerie
Tout ce qui a été posté par koto
-

Avis première roue pour quelqu'un qui aime pas les checkpoints intermédiaires
koto a répondu à un(e) sujet de Ninjarbuste dans Discussions générales
Je comprends la logique. C'est vrai qu'il y a des gens assez costauds qui roulent sur des petites roues mais je ne me rends pas bien compte de ce que ça fait car je suis plutôt léger... Bêtement comme ça, je partirais plutôt sur une 18 pouces à ta place dans ce cas. -
Quelqu'un a déjà réagi mais je remets une couche. Pour l'une des machines qui t'intéresse la marque s'appelle Kingsong. Le modèle 16 pouces dont tu parles est probablement la 16X. En général, on dit KS 16X. Tu veux avoir une roue neuve ou une roue d'occasion ?
-
Avis première roue pour quelqu'un qui aime pas les checkpoints intermédiaires
koto a répondu à un(e) sujet de Ninjarbuste dans Discussions générales
En ce qui concerne les questions 16 pouces ou 18 pouces il est vrai qu'il y a une différence. En se sent général plus stable sur une 18 pouces et plus maniable et plus vif sur une 16 pouces. Si on met un pneu large sur une 16 pouces alors très vite on sent qu'on se rapproche de certains aspects des 18 pouces. Avec un bon pneu sur une 18 pouces et un bon moteur on va avoir l'impression que la 18 pouces peut devenir plus agile. Il peut y avoir d'autres paramètres aussi en jeu mais ce que j'essaie de dire c'est qu'il y a des différences théoriques mais il faut toujours vérifier avec les configurations exactes. En général, une 18 pouces a plus de batterie donc elle est naturellement plus lourde. Une roue plus lourde c'est mieux ou c'est moins bien ? Ben, ça dépend du critère que l'on regarde. Pour soulever il vaut mieux une roue moins lourde mais pour la stabilité en général il vaut mieux une roue plus lourde. Si le moteur n'est pas assez puissant pour le mode de conduite du pilote alors une roue lourde peut être très fatiguante. MAis une roue légère peut faire peur quand il y a de grand coup de vent. J'ai encore une Tesla v1 aujourd'hui. Elle est à vendre d'ailleurs si ça t'intéresse. C'est très facile à lancer. J'ai tout de suite le sourire quand je roule dessus... Mais quand arrivent les bossent et trous et autres je me sens beaucoup mieux sur ma MSX en terme de confort et pour moins traumatiser le corps. J'ai aussi une roue à suspension aujourd'hui. Tu dis avoir mal au dos. En effet, tu devrais penser à une roue à suspension je pense. Tu n'as pas envie d'acheter une nouvelle roue dans 2 ans. Si tu dois commencer par une roue d'occasion pas trop cher, est-ce que ça ne vaut pas le coup de tester quelque chose pour pouvoir mieux choisir plus tard ? En général, nous passons tous par là. -
Ce serait intéressant d'avoir ton retour quand tu auras changé de pneu. Mon petit doigt me dit que la petite arriviste va changer de statut.
-
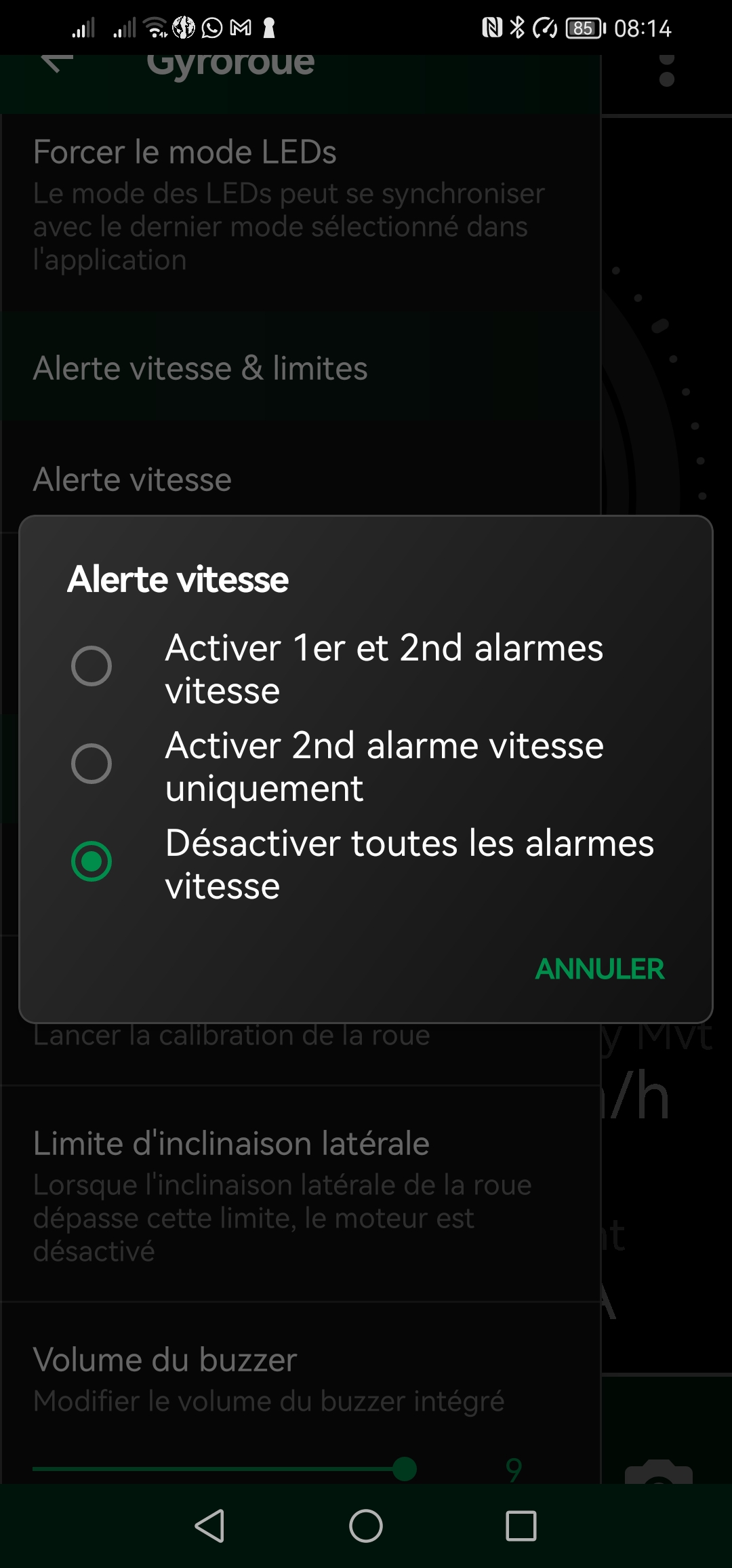
Je le fais via EUC World mais il s'agit des paramètres de la roue. Dans l'absolu, ce n'est pas recommandé de désactiver les alarmes de vitesse de la roue. Dans un premier temps on peut désactiver l'alarme 1 mais pas l'alarme 2 peut-être. Tout dépend de ton usage. A la base, ma config était "activer le 2nd alarme uniquement". Avec toutes les roues que j'ai eu jusqu'ici j'ai l'habitude de désactiver ces alarmes de vitesse de la roue par contre j'active des alarmes propres à EUC World que j'entends dans mon casque.
-
PNEU: Avec le pneu street Michelin c'est le jour et la nuit. Ca devient vraiment superbe ! En effet, je ne supporte pas du tout le pneu offroad d'origine BIP A 30 km/h: J'ai eu la même chose. J'ai désactivé les alarmes 1 et 2 J'ai regardé ensuite dans EUC World et je me suis rendu compte que le tiltback est paramétré à 25 km/h. J'ai relevé ce seuil et ensuite tout va bien. C'est tout ce que j'ai fait si je me souviens de tout.
-
Tension: J'ai eu 133.8V et 133.9V sur EUC World. Je n'ai jamais essayé avec l'appli begode Courant négatif: J'ai ça aussi mais il n'y a pas que ça comme problème. Il faut attendre que Seba (le développeur de EUC World) puisse traiter le problème dans EUC World a priori. Il n'y a pas que le courant qui est bizarre, il y a d'autres grandeurs mais je suppose que tout est lié. Je pèse un peu moins de 70kg. J'ai gonflé la suspension (batch2) à 280 - 290 PSI. J'ai mis 4 clics pour le rebond (je crois qu'on appelle ça comme ça). Mais ces détails de réglage n'ont aucun intérêt si le réglage est pourri. il faut donc que je te donne aussi mon avis sur le réglage que j'ai choisi. En vérité, je n'en sais rien du tout. Avant que je ne teste la pompe, la pression du ma suspension était en gros 270 PSI. Je l'ai monté à 280 - 290 PSI et j'ai senti que c'est un peu plus dur. Ensuite, j'ai découvert le rebond. Dès que je fais tourne à 1 clic il ya une différence très nette. Ensuite, je sens encore une différence en allant jusqu'à 4 clics mais par exemple entre 3 et 4 je ne suis pas sûr de percevoir la différence. Au dela de 4 je ne sais pas... J'ai un peu peur aussi que ça m'éjecte si je prends des bosses. la seule chose que je peux dire c'est que j'aime sentir un le rebond de temps en temps. C'est souple, doux, etc... je ne fais pas de grand saut et j'ai l'impression qu'aussi bien la config de départ que la config actuelle me plaisent bien. Le gain de confort entre ma MSX et la Master est tellement énorme que je n'arrive peut être pas à apprécier certains réglages fins de la suspension.
-
Pas seulement des enfants. Je vois encore pas mal de gens s'arrêter et regarder quand on les rencontre en forêt par exemple. Récemment, une petite famille s'arrête pour me voir partir. Tout récemment, un gars en vélo dire un truc du genre "Wow, lui il est ....." après je n'entends plus mais je suppose qu'il était plutôt étonné de toutes les protections mais c'est aussi parce que c'est associé à la roue. Nous sommes loin de passer inaperçu. On est loin de prendre une place aussi "naturelle" que les vélos dans la tête des gens.
-
Suite des mes expériences LES PHARES AVANT: Je suis parti en forêt le soir pour bien voir comment ça éclaire En ligne droite: on voit vraiment très bien. Il y a mieux mais c'est très bien. De plus comme le confort sur les trous et bosses est très bien, on peut rouler assez vite. C'est assez surprenant quand on n'a pas l'habitude. Dans un virage: Le faisceau est étroit du coup dès qu'il y a un virage on voit tout de suite assez peu. On doit bien ralentir pour comprendre ce qu'il se passe. Je m'attendais à ce que le faisceau soit plus large vu la configuration mais non... C'est un peu dommage. Si on veut rouler vite dans la nuit bien sombre, rien ne vaut une lampe torche tenue à la main que l'on peut orienter à loisir.
-
POSITIONNEMENT DES GRIZZLA PADS BIG: Je me rends compte que je n'ai presque pas de photos de mes essais. Je vais tout de même essayer de faire comprendre les choses. AVERTISSEMENT: A noter que je porte des protège tibias. Mes réglages tiennent compte de cela. Config 1: Pads avant: Tout en haut et le plus en avant possible. Pads arrière: Tout en haut et le plus en arrière possible. Avec cette configuraiton, j'arrive à démarrer facilement. J'aime bien reposer mes genoux sur le pads avant en vitesse de croisière. Je peux freiner à fond en tirant bien sur les pads arrières en étant accroupi. MAIS, j'ai beaucoup de mal à tenir la roue sur un pied à l'arrêt. Le risque de de ne pas la contrôler à l'arrêt est trop important. Config 2: J'ai rapproché juste les pads avant des pads arrières (sans rien changer d'autre). L'idée est de pouvoir mieux tenir la roue sur un pied. J'ai l'impression qu'il faut faire un tout petit geste pour aller du contact du pad avant vers le contact du pad arrière. C'est encore mieux si à l'arrêt on puisse avoir les deux contacts en même temps. La tenue sur un pied s'est nettement amélioré mais les démarrages en côte sont devenus difficiles et ça ce n'est pas du rout rassurant pour moi quand on est en ville. Quand voiture derrière vous commence à se mettre un peu sur le côté car vous traînez pour démarrer surtout que dans ce cas vous pourriez zigzaguer un peu... Bref, pas cool Config 3: Finalement, j'ai fini par laisser les pads avant très en avant et rapprocher plutôt les pads arrières. je pensais que j'allais avoir du mal à freiner du coup mais en rapprochant bien les pads arrières ils finissent par être vite en contact avec mes jambes dès que j'esquisse un geste de freinage. J'ai l'impression que ce n'est pas trop mal. C'est ce que j'utilise aujourd'hui. C'est cette config que je mets en image dans ce message.

-
Suite de mes retours d'expérience. J'essaie de faire avec la master ce que je fais avec mes roues habituellement. Aujourd'hui c'est aller à la boulangerie. En ce concerne le fait de prendre un panier et de le porter en faisant de la roue il n'y a rien à dire. Tout est vraiment mieux que sur la MSX car avec la master je suis vraiment plus stable. Cependant, cette expérience a encore montré que: je ne suis pas très à l'aise lors des arrêts dans une descente. Je n'arrive pas arrêter la roue et la tenir de manière très nette à un pied. Au retour, je voulais essayer de m'arrêter de façon nette (sur du plat). J'ai bien freiner jusqu'à l'arrêt de la roue avant de poser un pied à terre sauf que j'étais un peu en déséquilibre et j'ai du descendre du côté non habituel. J'avais peur que la roue se couche par terre (que je ne la tienne pas bien sur un pied car je ne sais pas l'habitude de descendre de ce côté). J'ai une main qui tient le panier à pain et avec l'autre main je cherche un poignet pour tenir la roue et évidemment il n'y en a pas. Mon cerveau voyait déjà la scène de la roue qui tombe en se couchant gentiment sur le côté mais voila, je suis droitier et il se trouve que je monte sur la roue en général en posant le pied gauche sur la roue. Avec ce cas inhabituel, c'est mon pied droit qui est sur la roue et comme c'est mon pied fort je tiens bien la roue et elle ne se couche pas. Ca n'a l'air de rien ce genre de choses pourtant quand on est dans la circulation c'est embêtant et ça peut être même dangereux. Pour le deuxième cas, je devrais peut être privilégier plutôt un sac à dos qu'un panier pour le pain ou alors partir avec la MSX car j'étais bien avec la MSX. Pour l'arrêt dans une descente, je vais continuer à m'entraîner.
-
Je peux faire avec les photos que j'ai en ma possession. Je n'ai pas forcément pris en photo tous les essais et je ne suis toujours pas sûr d'avoir trouvé quelque chose de vraiment bien mais ça s'améliore. Je note ta demande et je ferai ça plus tard.
-
Suite de mes expériences BASSE VITESSE & ARRET & DEMARRAGE & FREINAGE: Je me prépare à aller au travail avec la master. Je vais aux bois de Vincennes (En Ile De France). Dans une descente je dois m'arrêter au feu derrière une voiture: J'ai du mal à tenir la roue sur un seul pied lors de l'arrêt. Je trouve ça très inquiétant et dangereux pour moi. J'ai fini par trouver la solution en rapprochant les PADs arrière des PADs avant. Depuis que j'ai mis les PADs avant bien en avant les démarrages en côte fonctionnent bien. Je roule à basse vitesse au milieu des cyclistes et piétons je m'en sors très bien. A un autre endroit je suis sur route et je freine tout en souplesse pour voir s'il n'y a pas une voiture qui arrive par la droite à un carrefour. Je me rends compte que je fais beaucoup moins d'effort pour ralentir correctement avec ma MSX. J'ai encore les réflexes de la MSX. En répétant le geste j'arrive à comprendre que les PADs arrières ne sont pas ne suivent pas assez le long de ma jambe. Je modifie le positionnement des PADs arrières et ça se passe beaucoup mieux. Je peux désormais commencer à freiner en faisant un petit geste. C'est plus rassurant. Ce n'est pas encore totalement au point tout ça mais en tout cas avec l'expérience ça s'améliore. Tout ceci me fait penser que la master commence à être limite pour l'usage que j'en fais en ville. Je vais m'en sortir mais je me rends compte que le temps d'adaptation va être plus longue que ce que j'ai du faire avec mes autres roues jusqu'ici. Mais rassurez-vous, je me sens prêt à l'utiliser totalement déjà. Disons juste je dois me concentrer très fortement pour le moment mais j'y arrive. C'est comme ça que l'on prend de l'expérience.
-
Dilemme pour 2ème roue - vos rex sont bienvenues! -
koto a répondu à un(e) question de Ossamwal - Accado dans Questions / Réponses
Probablement bien plus intéressant la S18 en offroad mais vérifie bien que l'autonomie te conviendra- 32 réponses
-
- 1
-

-
- nouvelle roue
- inmotion
- (et 3 en plus)
-
Tout dépend du besoin. Visiblement, se trimbaler assez lentement sur de bonne route pendant 20 km convient très bien à ton usage. Mais il y a plein de raison pour que ces petites roues ne conviennent pas du tout au besoin. Plusieurs personnes ont eu la surprise d'avoir une moteur qui coupe par manque de puissante lors d'un démarrage en côte. A batterie pleine ça ne pose peut-être pas de problème mais dès qu'on route quelques kilomètre la roue n'a plus ce qu'il faut pour founir l'énergie nécessaire. Pareil, pour les moindres petits trous et bosses. Si on roule à 10 km/h ce n'est pas la même chose évidemment. Le risque diminue dans ce cas car s'il y a coupure on saura probablement se rattraper. Mais si on roule doucement, si on roule dans des coins où les automobilites sont impatients et nerveux nous pouvons risquer gros avec une petite machine. C'est vrai qu'on n'a qu'à rouler sur les pistes cyclables. Le problème c'est qu'il n'y en a pas partout. Les gars qui utilisent une roue pour faire des livraisons ne peuvent pas se contenter des très petites machines non plus. Les gens qui font plus de distance ne peuvent se contenter des petites machines non plus. Maintenant, si on regarde ce qu'il y a sur le marché aujourd'hui: Toute petite machine: Une begode Mten4 est quand même assez costaud au vu de sa taille (11 pouces) En 14 pouces, il y a par exemple la Begode MCM5 qui est un petit monstre par rapport à sa puissance et je pense que c'est beaucoup plus rassurante que les 14 pouces d'il y a quelques années. Le truc contre lequel nous ne pouvons pas faire grand chose sur une panne électronique ou quelque chose de ce type. Pour l'instant, ce dont on parle beaucoup c'est une coupure moteur par manque de puissance. C'est la raison pour laquelle je pense que la priorité pour moi est d'avoir une machine qui pousse assez loin l'éventualité de ce manque de puissance. Cela suppose, entre autres, plutôt gros moteur et grosse batterie ce qui implique taille plus grosse et poids plus important. Pour le travail je fais 50 km dans la journée donc c'est sûr que les toutes petites machines ne me conviennent pas. Je pense qu'il en faut pour tous les usages et a priori nous sommes assez bien servis quand même non ?
-
Suite de mes expériences UNE VIDEO A MA MANIERE: Pour "terminer" le retour d'expérience, voici une vidéo brute sans commentaire de la master en action Il ne faut pas chercher le beau paysage. Il ne faut pas vouloir regarder le beau pilote qui est dessus. Il faut juste regarder la roue 🤣
-
C'est aussi une solution. C'est en bas alors ça doit prendre pas mal de poussière et de l'eau si on roule sur les flaques d'eau peut être. A voir à l'usage.
-
Suite de mes expériences LA VIGNETTE D'ASSURANCE: Sur toutes mes roues, la vignette d'assurance est collée soit au dessus soit sur les côtés. Avec la master, j'ai commencé par la coller sur haut mais ça ne tient vraiment pas très bien sur la mousse. Sur le côté, avec le fairing grizzla il n'y a pas de place pour ça J'ai fini par la coller sur le garde-boue. Je ne trouve pas ça idéal car ça prend de la poussière tout le temps par là. Pas cool. Peut-être que les gens qui restent avec les pads d'origine pourront la coller sur les côtés, sur la partie haute d'une batterie arrière
-
C'est effectivement une bonne image pour illuster les sensations avec cette machine (une mercedes)
-
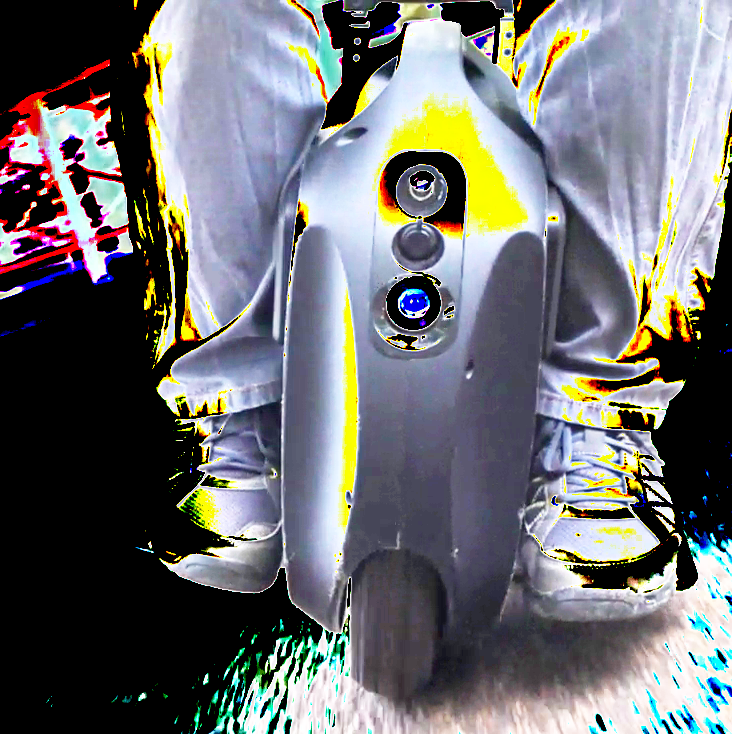
Marque: Gotway Modèle: Tesla v1 Moteur: 1900W Batterie: 1020Wh Taille: 16 pouces Poids: 19.6 kg Trolley central Localisation: Ile de France Distance parcourue: 6250 km (un peu moins mais on ne va pas chipoter) Date d'achat: Fin 2017 dans une boutique française Prix: 700 euros Quelques Informations supplémentaires: Evidemment, je fournis un chargeur avec J'ai aussi le carton d'origine si ça vous intéresse. J'ai 2 paires de pédales pour la machine. Si vous êtes sympas je peux vous fournir aussi laa 2èmepaire de pédales. Ce sont les pédales les plus récentes qui sont posées sur la machine aujourd'hui. Les deux pédales sont en bon état. J'en ai deux parce que j'ai plusieurs roues et j'ai essayé différentes pédales sur différentes roues. Comme vous pouvez le voir sur les photos, j'y suis peut-être allé un peut fort sur les bandes réfléchissantes et notamment les jaunes sur les côtés. La raison est que si vous êtes sur la roue, votre jambe peut plus ou moins cacher les bandes selon l'angle où l'on vous regarde. Je pense qu'avec ce que j'ai mis on ne peut pas ne pas vous voir. Si vous n'aimez pas il suffit de les retirer. Comme vous pouvez voir sur les photos, il y a des traces sur au moins un côté de la coque. Disons qu'il y a quelques traces d'usage causées aussi par quelques chutes. Ceux qui m'ont déjà connu sur le forum depuis au moins 2017 savent que j'adore la Tesla. D'ailleurs, aujourd'hui encore dès que je roule un peu dessus, par rapport à ma MSX ou ma toute nouvelle master je vois bien le confort qu'apportent ces deux modèles plus récents mais il y a un plaisir que je ressens de façon immédiate sur la Tesla que je n'ai pas sur ces modèles plus récents. Je me demande si je fais bien de vendre cette Tesla mais voila, si Marty Backe essaie de ne pas avoir plus de 10 machines moi modestement j'essaie de ne pas avoir plus de 2 machines et puis j'aurais bien aimé pouvoir acheter une machine de cette catégorie à ce prix là à mes débuts notamment. Une roue de 16 pouces est considérée comme idéale pour commencer. Elle est pratique à utiliser en ville. Elle est assez puissante pour franchir les nids de poule, pour ne pas trop trainer dans les montées. Le trolley est très bien placé et très efficace. Cependant, si vous avez des jambes très en X peut être que ça ne vous conviendra pas. Pour cela, il faudra tester la machine. Si vous êtes débutant, je peux vous accompagner pour apprendre à en faire (gratuitement bien sûr) Laissez-moi un message si vous êtes intéressés.




-
Suite de mes expériences REGLAGE DES PADS: C'est un peu infernal à faire car les positions changent presque à 1 millimètre de différence. Autant sur des machines moins lourdes je me contente d'un à peu près mais sur la master j'ai besoin d'être rassuré sur l'accélération le freinage et la descente de la roue. J'arrête maintenant de parle du réglage des pads car le réglage est tellement personnel que ça ne vous apportera rien que je parle des détails. MODE DE CONDUITE: Sur ma MSX, je m sens vraiment mieux en mode souple. Je me suis mis à tester le mode normal sur la master et j'aime vraiment beaucoup le comportement. Beaucoup de gens n'aiment pas une roue qui tangue un peu mais moi ça me plait bien. Tout se fait en souplesse. Cependant, je me suis rendu compte que même si en terme de sensation je freine de façon plus confortable avec ce réglage le freinage est moins fort qu'en mode dur. Je suis revenu en mode dur. CALIBRAGE: Pour améliorer le freinage en se servant du bas des pads avant, j'ai incliné un peu le calibrage vers l'arrières (mathématiquement + 3% ou + 4%. Avec les sensations au freinage avec le réglage des pads actuels j'avais senti que ça pourrait être mieux en revenant à la configuraiton initiale (- 1%) donc des pédales qui plonge légèrement vers l'avant. Effectivement, je suis bien comme ça. Je cherchais à trouver une solution en mettant le calibrage de départ car je crains que si je relève la roue, les gens en face de moi risquent de se prendre les phares en pleine tête. On verra à l'usage. EST-CE QUE LA MASTER PEUT ETRE UNE ROUE POUR DEBUTANT ? Dans l'absolu, rien n'est impossible. Cependant, je trouve qu'un débutant a assez de choses à gérer au début que ce n'est pas la peine qu'on lui rajoute le problème du poids de la roue. Quelqu'un qui est physiquement fort n'aura peut-être pas de souci mais je trouve que c'est vraiment trop lourd. Une MSX par exemple me semble plus adaptée car assez stable, un peu lourde certes mais pas trop, assez confortable aussi.
-
Suite de mes retours d'expérience ROULER A BASSE VITESSE: Rouler basse vitesse comme dans une circulation en ville avec de la circulation sur piste cyclable ou sur la route quand on ne peut pas faire autrement nécessite a priori vraiment de l'adaptation. J'explique pourquoi je pense ça. La master est une roue qui nécessite un certain engagement physique à basse vitesse. En tout cas avec le pneu street les gauche/droite ou demi-tour se gère très bien mais il faut quand même s'adapter un peu. Pour moi, il faut que j'engage le virage, je laisse tomber un peu la roue (en douceur pas comme avec le pneu offroad d'origine) et ensuite accélérer un peu. Ca permet de faire un virage assez serré en souplesse. C'est très agréable mai on sent bien le poids et il faut impulser ce qu'il faut au bon moment. C'est juste une habitude à prendre. Le plus dur physiquement c'est le freinage. A basse vitesse on a tendance à faire une petite action pour freiner masi en fait ça ne marche pas. C'est ça qui est un peu contre intuitif. On se laisse entraîner par le poids de la machine je pense. Même quand on roule doucement, il faut freiner de façon un peu énergique. Peut-être que j'ai mal réglé mes affaires mais en tout cas ce sont mes impressions aujourd'hui. Au bout de 280 km en 3.5 jour en gros je suis quand même un peu fatigué. J'ai eu quelques surprises de freinage à basse vitesse dues à mon inexpérience. Je vais réellement l'utiliser en condition réelle pour aller au travail à partir de la semaine prochaine. J'aurai en plus un sac de randonnée sur le dos. On verra bien comment tout ça va se passer. En tout cas, la prudence sera de rigueur.
-
Suite de mes expériences REGLAGE DES PADS: je vais essayer de vous expliquer les réflexions qui m'ont amené à faire le réglage que j'utilise actuellement. il est possible que je le change encore plus tard. Un réglage qui marche pour moi ne marche pas forcément pour quelqu'un d'autre. Vous trouverez attachée à ce message une image qui montre comment mes pads sont réglés aujourd'hui. Le point le plus important: le pad arrière se trouve aussi en arrière que possible. L'idée est de s'appuyer sur un point arrière qui doit se trouver aussi loin que possible en arrière pour mieux freiner. Il faut aussi qu'il soit placé haut pour qu'on ait l'impression d'être bien tenu. Le point suivant est la plus petite distance entre les deux pads. Quand on tient la roue avec une seule jambe, pour mieux gérer le poids, j'ai besoin que le point de contact avec le pad avant et le pad arrière soit proche. Il faut quand même qu'il y ait un peu d'espace sinon on risque de tomber bêtement si on a du mal à sortir sa jambe des pads. Ainsi, j'arrive mieux à tenir la roue sur un seul pied à l'arrêt. Le point suivant concerne la partie haute. Pour démarrer rapidement, ce qui est important pour moi dans le trafic pour plus de sécurité, il vaut mieux avoir le pad avant aussi en avant que possible. Le point haut du pad avant est donc aussi loin que possible vers l'avant. Il reste la hauteur à laquelle on pose le pad avant. D'après le point précédent on pourrait dire qu'on le met le plus haut possible mais en fait non car le bas du pad avant est très utile pour freiner. Si on arrive à accrocher le bas du pad avant quand on freine tout en balaçant le poids du corps bien en arrière (position presque assise) on arrive à freiner bien plus fort mais cela demande toujours une réaction assez vive et dynamique de la part du pilote pour le freinage. C'est assez efficace.

-
Suite de mes expériences OFFROAD: On m'a amené à faire un peu d'offroad aujourd'hui. Ôn m'a proposé d'essayer de monter une pente assez raide. Énorme surprise car elle monte vraiment toute seule. Je ne fais presque rien. Plus tard on m'a amené vers un coin VTT de la forêt de Sénart. Il y a plein de gros creux et bosses. Sur le petit circuit dit facile ça passe très bien. Je n'ai pas osé aller dans la partie qualifiée de difficile. Il faut essayer pour le comprendre mais je vous assure que monter une pente très raide on a l'impression qu'elle monte toute seule presque. Je ne pouvais pas imaginer autant de facilité
-
Je vous l'avais bien dit que je suis nul en suspension 😉 En effet, je ne savais pas utiliser la pompe en réalité. Comme ce n'est pas bien expliqué sur la carton de la pompe je pense que quelqu'un peut avoir le même doute que moi alors je transmets ici ce que j'ai découvert... Prière de ne pas se moquer d'un novice 😉 Au bout du tuyau d'air il y a un embout que l'on doit brancher sur la valve de la suspension. Juste avant l'écrou il y a petit levier qu'on peut soulever jusqu'à 90 degré. Au début, je ne savais rien du rôle de ce levier. Ensuite, j'ai vu une vidéo qui explique un peu le fonctionnement des pompes à suspension modernes qui ont deux molettes en gros. La pompe qui vient avec la suspension de master n'est pas aussi sophistiquée. C'est en m'inspirant de ça que j'ai réussi et surtout la bourde que j'ai faite c'est que quand on ferme l'écrou il faut visser jusqu'au bout. il ne faut pas serrer comme un malade mais il faut aller jusqu'au bout. Je reprends ci-dessous ce qu'il faut faire. Avant de commencer, vérifier bien au bout de la manche de la pompe que vous voyez bien "HP" affiché. Si ce n'est pas le cas tourner le bouton au bout pour afficher HP. L'explication est que la pompe peut servir pour pomper un pneu ou une suspension. Pour la suspension il faut choisir le mode Haute Pression (High Pressure: HP). Pour pomper un pneu il faut choisir le mode High Volume (HV) On branche l'écrou sur la valve et on ferme jusqu'au bout. On soulève le levier et on doit voir afficher sur le manomètre la pression de l'air dans la suspension. J''étais vers 260 PSI. Ensuite, il faut pomper et quand on pompe il faut bien tirer jusqu'au bout et pousser bien jusqu'au bout. Le but est d'atteindre la pression voulue. Il est possible que vous soyez un peu au dessus. Il y a un petit bouton juste en bas du cadran d'affichage du manomètre pour retirer un peu d'air. Il faut appuyer très doucement en donnant un petit coup sec sinon ça fuit vite. Une fois le réglage de la pression réalisé, il faut baisser le petit levier en le remettant à sa position de départ. Il faut dévisser l'écrou et le tour est joué A la fin de cette procédure, j'ai testé (à l'arrêt) la suspension. Je suis passé à quelque chose comme 280 ou 290 PSI je pense. C'est effectivement plus dur qu'avant. Il est possible que ce soit un peu dur pour moi qui ne pèse même pas 70 kg mais au moins j'ai appris quelque chose. Ca y est, je me sens moins nul maintenant 😉